一種新型車載自動(dòng)過分相系統(tǒng)的改進(jìn)設(shè)計(jì)*
2011-05-04 03:39:22劉建秀谷明輝
鐵道機(jī)車車輛 2011年2期
關(guān)鍵詞:系統(tǒng)
劉建秀,谷明輝
(鄭州輕工業(yè)學(xué)院 機(jī)電工程學(xué)院,河南鄭州450002)
自動(dòng)過分相的關(guān)鍵技術(shù)是定位,定位準(zhǔn)確是系統(tǒng)可靠性的關(guān)鍵,也是機(jī)車運(yùn)行中安全的關(guān)鍵。GFX-3型自動(dòng)過分相系統(tǒng)的定位主要是靠車載感應(yīng)器在機(jī)車運(yùn)行中接收地面定位器信號(hào)來(lái)確定機(jī)車位置的。地面定位器和車載感應(yīng)器分別采用斜對(duì)稱埋設(shè)和備份安裝(分相區(qū)前后分別埋有兩個(gè)地面定位器),以保證自動(dòng)過分相的安全和可靠。此型號(hào)自動(dòng)過分相系統(tǒng)不可避免地存在一些不足。通過對(duì)鄭州機(jī)務(wù)段GFX-3型自動(dòng)過分相裝置使用情況的調(diào)查,發(fā)現(xiàn)一些隱患。
(1)地面定位器可能損壞或者反應(yīng)不靈敏。導(dǎo)致機(jī)車感應(yīng)器無(wú)法正常接收信號(hào),從而機(jī)車不能進(jìn)行自動(dòng)過分相操作。(2)車載感應(yīng)器可能損壞甚至丟失。列車在行駛或連掛或制動(dòng)停車時(shí),車輛之間會(huì)有沖擊振動(dòng),由此引起車載感應(yīng)器安裝支架松動(dòng),因碰撞而損壞甚至丟失。(3)過分相信號(hào)單一,沒用冗余。在鋪軌過程中,如果人為失誤造成地面定位器錯(cuò)位,將使機(jī)車接收過分相信號(hào)不準(zhǔn),造成分相區(qū)提前或者滯后的假象;機(jī)車行駛中路面上有磁性物體或許能造成假的過分相信號(hào),使機(jī)車誤進(jìn)行自動(dòng)過分相操作。為解除這些隱患,有針對(duì)性的設(shè)計(jì)了一種新型自動(dòng)過分相系統(tǒng)。
1 新系統(tǒng)簡(jiǎn)介
新型的自動(dòng)過分相系統(tǒng)是在GFX-3型系統(tǒng)的基礎(chǔ)上,增加新的過分相信號(hào)發(fā)生模塊,從而實(shí)現(xiàn)過分相信號(hào)的冗余,保證了機(jī)車運(yùn)行安全。
新增加的過分相信號(hào)發(fā)生模塊有兩個(gè),分別是時(shí)間模塊和車載GPS定位模塊。機(jī)車行駛時(shí),車載GPS定位模塊在能和衛(wèi)星系統(tǒng)正常通信的情況下,時(shí)刻監(jiān)測(cè)機(jī)車當(dāng)前地理坐標(biāo),并把當(dāng)前地理坐標(biāo)與預(yù)輸入的各點(diǎn)地理坐標(biāo)進(jìn)行比較,以確定機(jī)車是否接近進(jìn)入分相區(qū)、處在分相區(qū)或駛出分相區(qū);時(shí)間模塊則根據(jù)監(jiān)測(cè)的機(jī)車當(dāng)前行進(jìn)速率和地理坐標(biāo),當(dāng)機(jī)車行進(jìn)在接近分相區(qū)時(shí),計(jì)算出機(jī)車到達(dá)分相點(diǎn)的剩余時(shí)間(即以倒計(jì)時(shí)的形式顯示),以提示司機(jī)距離過分相動(dòng)作剩余的時(shí)間,當(dāng)機(jī)車行進(jìn)在分相區(qū)時(shí),會(huì)計(jì)算出機(jī)車已進(jìn)入分相區(qū)的時(shí)間;當(dāng)機(jī)車在接近分相區(qū)行駛時(shí),司機(jī)操作臺(tái)指示燈會(huì)有預(yù)警信號(hào),為“黃色”;當(dāng)機(jī)車到達(dá)過分相點(diǎn)時(shí),指示燈顯示為“紅色”,同時(shí)蜂鳴器響起,提示司機(jī)自動(dòng)過分相開始。因此機(jī)車的過分相信號(hào)發(fā)生源有3種,分別是GPS定位模塊、時(shí)間模塊、地面定位器,3種冗余信號(hào)源中如果有一種出現(xiàn)故障,系統(tǒng)會(huì)及時(shí)作出提示以引起司機(jī)注意,司機(jī)可觀察自動(dòng)過分相系統(tǒng)的運(yùn)行情況作相應(yīng)處理,必要時(shí)可作手動(dòng)過分相,以避免發(fā)生行車事故。
新系統(tǒng)采用VB 6.0軟件創(chuàng)建人機(jī)交互界面,便于操作。
1.1 時(shí)間模塊
利用監(jiān)測(cè)到的機(jī)車運(yùn)行速度和機(jī)車當(dāng)前地理坐標(biāo),計(jì)算出機(jī)車到達(dá)分相點(diǎn)的剩余時(shí)間或機(jī)車已進(jìn)入分相區(qū)的時(shí)間。當(dāng)機(jī)車在駛?cè)虢咏窒鄥^(qū)那一刻時(shí),時(shí)間模塊從GPS定位模塊中取得機(jī)車當(dāng)前地理坐標(biāo),然后和預(yù)輸入分相點(diǎn)地理坐標(biāo)比較,確定機(jī)車與分相點(diǎn)的距離S。同時(shí)時(shí)間模塊又根據(jù)監(jiān)測(cè)到的機(jī)車當(dāng)前行駛速率v,可計(jì)算獲得機(jī)車到達(dá)分相區(qū)所需時(shí)間t=S/v。當(dāng)機(jī)車在駛?cè)敕窒鄥^(qū)的那一刻時(shí),以同樣的方法獲得機(jī)車在分相區(qū)中行駛的時(shí)間t′。各個(gè)分相區(qū)的這兩個(gè)時(shí)間值都要預(yù)輸入時(shí)間模塊,并在每次機(jī)車運(yùn)行前要對(duì)這些預(yù)輸入時(shí)間值在人機(jī)交互界面上進(jìn)行確認(rèn)。如圖1所示。
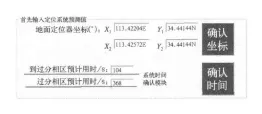
圖1 定位預(yù)輸入部分界面
當(dāng)機(jī)車經(jīng)過過分相倒計(jì)時(shí)點(diǎn)后,即在接近分相區(qū)行駛時(shí),人機(jī)交互界面定位系統(tǒng)部分會(huì)同步顯示機(jī)車到達(dá)分相點(diǎn)的剩余時(shí)間,如圖2所示。

圖2 機(jī)車在接近分相區(qū)行駛時(shí)的定位系統(tǒng)顯示信息
當(dāng)“微機(jī)計(jì)算到達(dá)剩余時(shí)間”(倒計(jì)時(shí))為0時(shí),機(jī)車將進(jìn)行斷主斷等過分相操作。機(jī)車并于此刻進(jìn)入分相區(qū),此時(shí)人機(jī)交互界面定位系統(tǒng)部分將同步顯示機(jī)車在分相區(qū)中行駛的時(shí)間,如圖3所示。
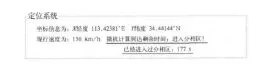
圖3 機(jī)車在分相區(qū)中行駛時(shí)定位系統(tǒng)顯示信息
當(dāng)機(jī)車駛出分相區(qū)后,時(shí)間模塊會(huì)根據(jù)當(dāng)前地理坐標(biāo),判斷機(jī)車是否在過分相倒計(jì)時(shí)區(qū)域(即是否在接近分相區(qū)),不在則定義為機(jī)車在自由區(qū)行駛,此時(shí)人機(jī)交互界面定位系統(tǒng)部分將同步顯示“準(zhǔn)備下次倒計(jì)時(shí)!”,直到機(jī)車再次進(jìn)入接近分相區(qū),如圖4所示。
機(jī)車行駛的路況是復(fù)雜的,存在隧道等影響GPS定位模塊與衛(wèi)星通信的路段。即當(dāng)機(jī)車駛?cè)胨淼罆r(shí),車載GPS定位模塊會(huì)和衛(wèi)星失去通信聯(lián)系。在這種情況下,時(shí)間模塊是將GPS定位模塊起作用的最后一刻記為機(jī)車于此刻進(jìn)入接近分相區(qū),這樣就可按正常程序計(jì)算出機(jī)車到達(dá)分相點(diǎn)的所需時(shí)間t=S/v,以后的倒計(jì)時(shí)及過分相操作如常。
自動(dòng)過分相系統(tǒng)啟用前,需要對(duì)路況信息進(jìn)行統(tǒng)計(jì),其中包括地面定位器的地理坐標(biāo)和不能GPS通信的隧道等路段的地理坐標(biāo)等。然后根據(jù)統(tǒng)計(jì)的路況信息,確定自動(dòng)過分相系統(tǒng)時(shí)間模塊的過分相倒計(jì)時(shí)點(diǎn),對(duì)于GPS定位系統(tǒng)無(wú)法工作的區(qū)域,要把倒計(jì)時(shí)點(diǎn)提前或滯后。確定的倒計(jì)時(shí)點(diǎn)時(shí)兩個(gè)地理坐標(biāo)的比較有一個(gè)誤差范圍,此誤差范圍是根據(jù)機(jī)車運(yùn)行速率狀況統(tǒng)計(jì)計(jì)算出的。最后把統(tǒng)計(jì)好的各種數(shù)據(jù)輸入時(shí)間模塊。
1.2 GPS定位模塊
自動(dòng)過分相系統(tǒng)GPS定位模塊的作用是動(dòng)態(tài)監(jiān)測(cè)機(jī)車在運(yùn)行中的地理坐標(biāo),以確定機(jī)車在軌道中的位置,并將地理坐標(biāo)動(dòng)態(tài)地顯示在人機(jī)交互界面上,如圖1~圖4所示。機(jī)車運(yùn)行中,GPS定位模塊會(huì)把監(jiān)測(cè)到的當(dāng)前地理坐標(biāo)實(shí)時(shí)與預(yù)輸入的接近分相點(diǎn)地理坐標(biāo)和地面定位器地理坐標(biāo)進(jìn)行比較,以確定是否到達(dá)接近分相區(qū)、處在分相區(qū)。當(dāng)監(jiān)測(cè)到的坐標(biāo)值在指定范圍內(nèi)時(shí),機(jī)車會(huì)進(jìn)行相應(yīng)的時(shí)間模塊的倒計(jì)時(shí)操作或系統(tǒng)的自動(dòng)過分相操作;不在指定范圍時(shí),GPS定位模塊正常監(jiān)測(cè),機(jī)車正常行駛。
自動(dòng)過分相系統(tǒng)啟用前,同樣需要統(tǒng)計(jì)地面定位器的地理坐標(biāo)并預(yù)輸入GPS定位模塊,預(yù)輸入值要保證準(zhǔn)確性。這里預(yù)輸入的地面定位器的地理位置坐標(biāo),不是所有地面定位器的地理位置坐標(biāo),只是預(yù)斷點(diǎn)地面定位器的地理坐標(biāo)和強(qiáng)合點(diǎn)的地理坐標(biāo)。GPS定位模塊中地面定位器地理坐標(biāo)的預(yù)輸入是一次性的,如果以后鐵道線路有所改動(dòng),只需預(yù)輸入地理坐標(biāo)進(jìn)行更改即可。機(jī)車運(yùn)行前需要對(duì)這些預(yù)輸入的地理坐標(biāo)進(jìn)行確認(rèn)。人機(jī)交互界面的相應(yīng)部分如圖5。
當(dāng)機(jī)車進(jìn)入隧道時(shí),GPS定位模塊會(huì)無(wú)法工作。而統(tǒng)計(jì)的路況信息中有隧道前一段某一點(diǎn)的地理坐標(biāo),當(dāng)機(jī)車到達(dá)該點(diǎn)時(shí),過分相信號(hào)的控制權(quán)將移交給時(shí)間模塊,由時(shí)間模塊監(jiān)測(cè)機(jī)車的過分相狀態(tài),保證機(jī)車的運(yùn)行安全。
2 新型自動(dòng)過分相系統(tǒng)運(yùn)行機(jī)制
新型自動(dòng)過分相系統(tǒng)不只依賴地面定位器對(duì)機(jī)車進(jìn)行定位,它還有另外兩種定位信號(hào)源選擇,即GPS定位模塊和時(shí)間模塊。這兩種模塊的定位方法跟地面定位器的定位方法不同,它們有各自的特點(diǎn)。
GPS定位模塊實(shí)時(shí)監(jiān)測(cè)機(jī)車的當(dāng)前地理坐標(biāo),并把它輸入到時(shí)間模塊。GPS定位模塊實(shí)時(shí)把機(jī)車當(dāng)前地理坐標(biāo)與預(yù)輸入的過分相倒計(jì)時(shí)點(diǎn)的地理坐標(biāo)或地面定位器預(yù)斷點(diǎn)地理坐標(biāo)或地面定位器強(qiáng)合點(diǎn)地理坐標(biāo)進(jìn)行比較,確定機(jī)車相對(duì)于分相區(qū)的位置。當(dāng)機(jī)車當(dāng)前地理坐標(biāo)與相應(yīng)的過分相倒計(jì)時(shí)點(diǎn)的地理坐標(biāo)在比較誤差范圍內(nèi)時(shí),時(shí)間模塊根據(jù)采集的地理坐標(biāo)數(shù)據(jù)計(jì)算出距離S,又利用采集的速度v,計(jì)算出倒計(jì)時(shí)間t=S/v,并依此開始倒計(jì)時(shí),倒計(jì)時(shí)狀態(tài)同步在人機(jī)交互界面上顯示。當(dāng)?shù)褂?jì)時(shí)為0時(shí),機(jī)車即開始執(zhí)行自動(dòng)過分相的斷主斷等操作。當(dāng)機(jī)車當(dāng)前地理坐標(biāo)與相應(yīng)的地面定位器預(yù)斷點(diǎn)地理坐標(biāo)在比較誤差范圍內(nèi)時(shí),機(jī)車同樣即開始執(zhí)行自動(dòng)過分相的斷主斷等操作。而當(dāng)機(jī)車經(jīng)過地面定位器預(yù)斷點(diǎn)時(shí),機(jī)車依然會(huì)執(zhí)行自動(dòng)過分相的斷主斷等操作。這3種分相區(qū)前的過分相信號(hào)為邏輯或關(guān)系,即若有一種信號(hào)先起作用,則其余后來(lái)的兩種信號(hào)就失去作用,機(jī)車以此先到來(lái)的信號(hào)為觸發(fā)條件進(jìn)行相應(yīng)的自動(dòng)過分相操作。
當(dāng)機(jī)車在分相區(qū)行駛時(shí),時(shí)間模塊對(duì)機(jī)車在分相區(qū)中的行駛時(shí)間進(jìn)行計(jì)時(shí),當(dāng)計(jì)時(shí)達(dá)到預(yù)輸入的此分相區(qū)機(jī)車過分相統(tǒng)計(jì)時(shí)間時(shí),機(jī)車開始執(zhí)行自動(dòng)過分相的合主斷等操作。當(dāng)機(jī)車的當(dāng)前地理坐標(biāo)與相應(yīng)的地面定位器強(qiáng)合點(diǎn)地理坐標(biāo)在比較誤差范圍內(nèi)時(shí),機(jī)車亦開始執(zhí)行自動(dòng)過分相的合主斷等操作。而當(dāng)機(jī)車經(jīng)過地面定位器強(qiáng)合點(diǎn)時(shí),機(jī)車依然會(huì)執(zhí)行自動(dòng)過分相的合主斷等操作。這3種分相區(qū)后的過分相信號(hào)任意兩種先來(lái)的過分相信號(hào)被接收確認(rèn)后,第3種后來(lái)的信號(hào)將不起作用時(shí),機(jī)車才會(huì)被觸發(fā)進(jìn)行自動(dòng)過分相的合主斷等操作。
3種過分相信號(hào)之間的邏輯關(guān)系,很好地實(shí)現(xiàn)定位信號(hào)的冗余,保證了在某一種定位信號(hào)失效的情況下機(jī)車仍能正常地進(jìn)行自動(dòng)過分相,進(jìn)一步保障了機(jī)車在行進(jìn)中過分相時(shí)的安全。
3 搭建設(shè)備時(shí)的疑難及其解決策略
搭建設(shè)備時(shí),要實(shí)現(xiàn)新增加自動(dòng)過分相定位模塊的功能,會(huì)遇到的問題有:(1)GPS定位模塊如何嵌入自動(dòng)過分相系統(tǒng),并與系統(tǒng)實(shí)現(xiàn)通信;(2)時(shí)間模塊和GPS定位模塊如何實(shí)現(xiàn)數(shù)據(jù)的預(yù)存和處理。
針對(duì)這兩個(gè)問題的解決策略是:(1)GPS定位模塊可使用GPS信號(hào)接收機(jī),它能夠?qū)PS衛(wèi)星信號(hào)進(jìn)行搜索、捕捉,并因有通信接口,很容易實(shí)現(xiàn)與自動(dòng)過分相系統(tǒng)通信。(2)數(shù)據(jù)預(yù)存和處理可通過單片機(jī)實(shí)現(xiàn);數(shù)據(jù)處理較復(fù)雜,可用64位單片機(jī);數(shù)據(jù)處理程序?qū)懭隦OM(只讀存儲(chǔ)器),預(yù)存數(shù)據(jù)寫入 RAM(隨機(jī)存儲(chǔ)器);為了保證數(shù)據(jù)預(yù)存與處理的正確性與安全性,可將寫好程序的單片機(jī)統(tǒng)一化,作為自動(dòng)過分相系統(tǒng)的專用設(shè)備。
4 結(jié)束語(yǔ)
在進(jìn)行新型自動(dòng)過分相系統(tǒng)的設(shè)備搭建時(shí),僅需要在GFX-3型自動(dòng)過分相系統(tǒng)基礎(chǔ)上新嵌入兩個(gè)定位模塊,GFX-3型系統(tǒng)的原有部分改動(dòng)很少,因而節(jié)約了研究成本。與GFX-3型系統(tǒng)相比較,在性能上,新型自動(dòng)過分相裝置更優(yōu)越,它能更有效避免機(jī)車運(yùn)行時(shí)發(fā)生意外,進(jìn)一步地保證機(jī)車通過分相區(qū)時(shí)安全,從而使機(jī)車的運(yùn)行更具可控性。系統(tǒng)在一定程度上是具有試用推廣價(jià)值。
[1] 謝興中.電力機(jī)車過分相問題的探討[J].機(jī)車電傳動(dòng),2008,(3):64-66.
[2] 曾曉安,李 明.大秦線車載自動(dòng)過分相系統(tǒng)的研制與應(yīng)用[J].機(jī)車電傳動(dòng),2007,(4):11-14.
[3] 寧 濤,李 明.電力機(jī)車自動(dòng)過分相系統(tǒng)專用檢測(cè)臺(tái)的設(shè)計(jì)[J].機(jī)車電傳動(dòng),2007,(3):65-73.
[4] 姚孝剛,陳 娟.電力機(jī)車自動(dòng)過分相功能檢測(cè)系統(tǒng)研制[J].鐵道機(jī)車車輛,2006,(5):67-68.
[5] 姚孝剛.大秦線自動(dòng)過分相裝置誤動(dòng)的處理[J].機(jī)車電傳動(dòng),2006,(4):70-71.
[6] 李官軍,馮曉云.高速動(dòng)車組自動(dòng)過分相控制策略研究與仿真[J].電工技術(shù)學(xué)報(bào),2007,(7):181-185.
[7] 姚孝剛.自動(dòng)過分相系統(tǒng)設(shè)計(jì)與改進(jìn)[J].機(jī)車電傳動(dòng),2009,(4):41-43.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
