高速列車異步牽引電機直接磁場定向控制研究
2011-05-04 03:39:22任晉旗葛瓊璇
鐵道機車車輛 2011年2期
關鍵詞:磁場
任晉旗,葛瓊璇,馬 遜,趙 魯
(中國科學院 電工研究所,北京100190)
異步電機具有結構簡單、堅固耐用、維護量小,機械轉矩特性好等優點,在高速列車牽引傳動系統中得到廣泛應用。異步電機的控制屬于交流傳動技術領域,20世紀70年代之后,交流傳動技術得到快速發展,電力電子功率轉換器件以及控制系統軟硬件技術取得很大進步,出現多種先進的交流電機控制策略,如滑差頻率控制、磁場定向控制、直接轉矩控制。這些控制策略都是基于穩態或者動態的電機數學模型,對電機實行閉環控制,使電機的運行特性大為提高。
磁場定向控制技術又稱為矢量控制,基于坐標變換原理,通過調節電機電壓的相位、頻率、幅值,直接控制電機的電流、勵磁與轉矩水平,使電機電流的勵磁與轉矩分量之間解耦,電機動靜態特性良好,利于進行車輛黏著控制,適合高速大功率電機的牽引與電制動控制,是當前牽引傳動領域的主流技術之一。
磁場定向控制的原理最早由西門子公司的F.Blaschke于1971年提出,一般可以分為直接法和間接法兩類:間接磁場定向控制利用動態滑差頻率與轉子轉速相加得到同步頻率,積分后得到轉子磁鏈的角度;直接磁場定向控制利用磁鏈觀測器對電機磁鏈進行實時計算,然后通過坐標轉換進行控制。磁鏈觀測器包括電壓型、電流型以及混合型,按結構可以分為開環和閉環形式,其性能直接影響磁場定向的準確度以及電機的控制特性。
參數偏差對磁鏈觀測的精度影響很大,當電機運行時,由于溫升與磁飽和、集膚效應等因素,電機參數往往發生很大變化,嚴重影響磁鏈觀測器的精度和效果。文獻[1]采用頻率響應函數對各類磁鏈觀測器的準確度以及參數魯棒性進行了詳細分析,認為磁鏈觀測器對于磁鏈角度觀測的準確度優于對磁鏈幅值的觀測。文獻[2]介紹和比較了基于磁鏈觀測器的直接磁場定向控制技術。文獻[3]介紹了直接磁場定向控制技術在高速列車牽引控制系統中的工程應用。
國內多型高速動車組及機車牽引系統中采用了轉子磁場定向控制技術,比如CRH1型、CRH2型、CRH3型動車以及部分機車。本文針對直接轉子磁場定向控制中的磁鏈觀測器進行深入全面的分析研究,以某型動車組用牽引電機為例,分析了磁鏈觀測器準確度及對參數變化的敏感性,設計了用于高速列車牽引控制的磁鏈觀測器。通過仿真實現了基于混合磁鏈觀測器的直接磁場定向控制,仿真結果表明,設計的磁鏈觀測器準確,實現了牽引電機的解耦控制。
1 磁鏈觀測器特性分析
進行磁鏈觀測器分析,首先建立電機的數學模型,以復相量表示的靜止坐標系電機數學方程形式簡單,而且便于進行頻響函數的推導與分析。電機的各變量采用復相量形式表達,形如 fdqs=fds+j?fqs,比如電機
電機電壓方程表示為

磁鏈方程為

方程(1)、(2)、(3)表示了電機的數學模型。公式中,為dq坐標系定子電壓相量為dq坐標系定、轉子電流相量;r為 dq坐標系定、轉子磁鏈相量;rs、rr為定轉子電阻;Ls、Lr、Lm為定轉子及勵磁電感為電機轉速(角頻率);p為微分算子;j為復算子。
根據公式(1)~(3),可以推導不同的磁鏈觀測器方程,根據輸入電流進行計算的是電流型磁鏈觀測器,根據電壓計算的是電壓型磁鏈觀測器以及混合型磁鏈觀測器。由于電機運行參數會發生變化,比如運行中電機溫度升高使定子、轉子電阻阻值發生變化,電機勵磁電感存在非線性特性,而且電機參數本身測量存在誤差,都會導致控制器中的磁鏈觀測不準確,影響控制效果。下面基于頻響函數對各類磁鏈觀測器的特性進行分析。
(1)電流型磁鏈觀測器
根據公式(2)和(3)可以推導得到電流型磁鏈觀測器公式為
式(4)中的觀測器所用參數與磁鏈、電流等變量的頂部以上標“∧”表達,下文中實際電機的參數與變量均不加上標,以示區分。實際電機的轉子磁鏈以電流型觀測器的形式表達如下式:


圖1 電流型磁鏈觀測器方框圖
根據式(4)與(5)可以推導磁鏈觀測器的傳遞函數為
對公式(6)進行頻率響應函數(FRF)分析,能夠得到電機參數對磁鏈觀測準確度的影響,以及在不同速度下觀測器的工作性能,幅頻函數能夠表明觀測磁鏈與實際磁鏈的幅值偏差,相頻函數則表明二者相位之差,也就是觀測磁鏈角度的偏差。
將式(6)中的算子p以穩態激勵頻率j?ωe表達,ωe為電機供電角頻率。式(6)推導為

圖2 電流型磁鏈觀測器的FRF分析
圖2表示了電流型磁鏈觀測器的參數與實際電機參數不同時對頻響函數特性的影響,包括勵磁電感Lm、轉子電阻 rr、轉子漏感 Lr等。由圖2(a)可見,在不同滑差范圍,觀測器受參數影響的規律不同,由于基頻為電機額定頻率,則等同于不同電機轉速的觀測器特性差異:滑差大、速度低時轉子電阻偏差對觀測磁鏈幅度的誤差影響較大,高速時較小。相反地,滑差小、速度高時勵磁電感偏差對觀測磁鏈幅度的誤差影響較大,低速時較小。由圖2(b)相頻響應可見,勵磁電感、轉子電阻偏差對磁鏈角度偏差的影響較大,但隨滑差增大影響相應削弱。
(2)電壓型磁鏈觀測器(圖3)
由公式(1)和(3)可以推導電壓型磁鏈觀測器方程:

經過推導,可以得到
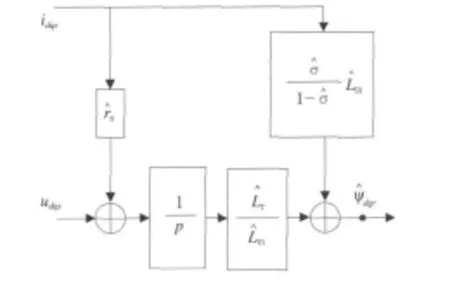
圖3 電壓型磁鏈觀測器方框圖
對公式(10)進行頻率響應函數分析,結果如圖4所示。與電流型磁鏈觀測器不同,頻響函數中,滑差頻率l與電機角頻率 ωe均是變量,為便于分析,而且由于磁場定向控制下,電機牽引階段的滑差基本保持固定,所以選取額定滑差頻率,對不同速度下的響應函數進行計算分析。
圖4表示了電壓型磁鏈觀測器參數定子電阻rS、勵磁電感Lm、定子漏感Ls、轉子漏感Lr與實際電機參數發生偏差對觀測器幅頻相頻特性的影響。由圖4a可知,速度低時定子電阻偏差對觀測磁鏈幅度的影響較大。其它參數的偏差在全速度范圍內對觀測磁鏈的幅度影響都不大。由圖4(b)可見,定子電阻對磁鏈角度準確度的影響較大。
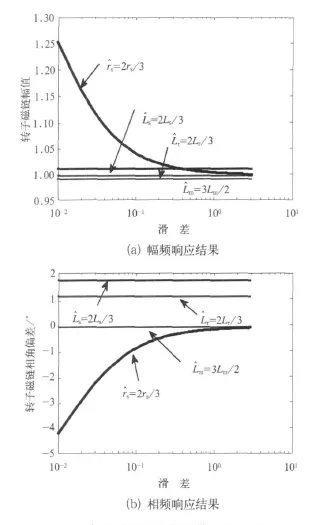
圖4 電壓型磁鏈觀測器的FRF分析
(3)閉環混合磁鏈觀測器
電流型磁鏈觀測器不受定子電阻影響,而電壓型磁鏈觀測器在低速時受定子電阻影響,受其他參數影響較小。因此這兩種觀測器具有一定的互補性,將二者結合建立混合型的磁鏈觀測器,并且引入閉環校正環節,能夠取得良好的觀測效果。3型車的牽引電機控制即采用這一類型觀測器。
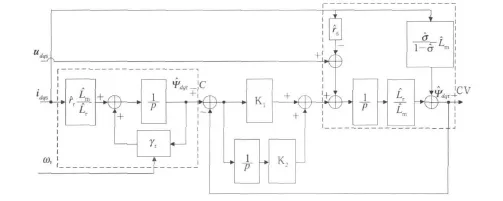
圖5 混合型閉環磁鏈觀測器
混合型閉環磁鏈觀測器如圖5所示,令電流模型觀測器單獨作用求得磁鏈為c;令電壓電流混合模型磁鏈觀測器作用求得磁鏈為;PI調節器輸入的磁鏈偏差為這一偏差輸入電壓模型,對電壓模型進行校正,在這一結構新構成的電壓模型中,計算磁鏈的反電勢項中除原先的電壓積分外,增加了一項kΔ,即根據電壓模型計算轉子磁鏈為

將磁鏈偏差代入上式得:

實際電機的磁鏈可表達為

推導可得

相應地,實際磁鏈表達式為

公式(16)就是混合型閉環磁鏈觀測器的傳遞函數公式,對其進行計算可得到幅頻、相頻響應結果如圖6所示。
圖6中表示了磁鏈觀測器參數定子電阻rS、轉子電阻rr、勵磁電感Lm、轉子漏感Lr與實際電機參數發生偏差對觀測器的幅頻、相頻特性的影響。由圖6(a)、圖4(a)、圖2(a)可見,低速時,定子電阻的偏差造成磁鏈幅值偏差很小,對比圖6(b)、圖 4(b)、圖2(b)可見,全速度范圍內,定子電阻造成的相角偏差很小,轉子電阻、勵磁電感的偏差造成的觀測器相位偏差也減小了。FRF分析表明,混合型磁鏈觀測器結合了電壓型、電流型兩種觀測器的優點,取得了較好的觀測效果,適合用于直接磁場定向控制系統中。
2 直接磁場定向控制系統的仿真實現與分析
基于混合型磁鏈觀測器進行磁鏈觀測,就能夠實現直接磁場定向控制。在Matlab/Simulink中進行仿真研究,Simulink中的電機模型能夠輸出實際的磁鏈角度和幅值,便于對比磁鏈觀測器計算磁鏈的準確度。仿真系統如圖7所示。給定轉矩,經勵磁/轉矩電流給定環節輸出勵磁和轉矩電流分量I*d,I*q,分別與實際電流Id,Iq計算差值,通過兩個PI調節器進行閉環控制,輸出給定電壓分量,經dq/α β旋轉坐標變換輸出至PWM調制逆變器,輸出驅動電機運行。磁鏈觀測器接收電機電壓uab、ubc,電流Ia,Ib、轉速ωr的測量信號,經計算得到磁鏈 角度 θr,送往 dq/α β 與 α β/dq坐標變換環節進行轉換。這一仿真模型基本實現了直接磁場定向控制系統。仿真模型中,磁鏈觀測器的電機參數,包括定轉子電阻、勵磁電感等與電機實際參數不同。仿真驗證電機加速牽引過程中參數偏差對磁鏈觀測器參數的影響。仿真電機參數(勵磁電感Lm=0.053;轉子漏感Lr=0.001 8;定子漏感Ls=0.001 2;轉子電阻rr=0.066;定子電阻rs=0.107)的定轉子電阻增加50%,勵磁電感下降10%,其他參數不變。
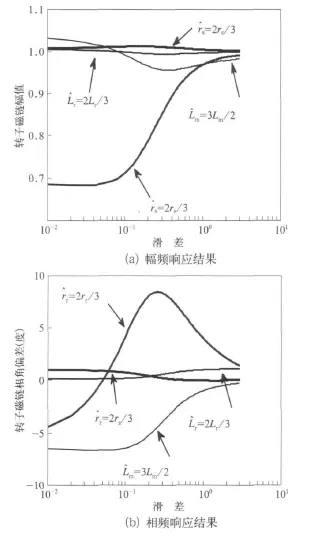
圖6 混合型閉環磁鏈觀測器的FRF分析
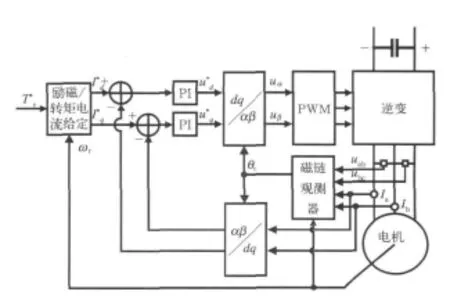
圖7 電機直接磁場定向控制系統
仿真結果如圖8所示。圖8中從上至下分別為觀測器磁鏈角度、實際電機磁鏈角度以及兩者之間的偏差。由圖8可見,觀測磁鏈角度與實際電機磁鏈角度基本一致,誤差小于10°,磁場定向效果良好。
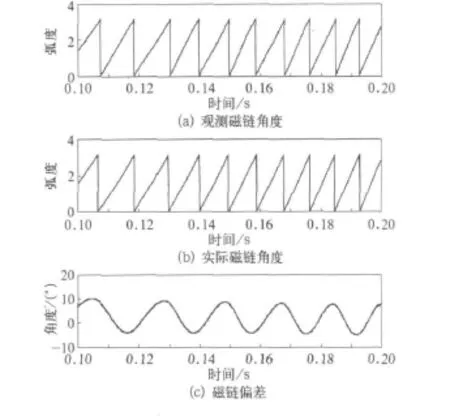
圖8 直接磁場定向磁鏈觀測器仿真結果
3 結論
通過對直接磁場定向控制系統中的電壓型、電流型以及混合閉環磁鏈觀測器進行頻率響應函數分析,表明電流型觀測器不受定子電阻影響,而電壓型觀測器低速時受定子電阻影響較大,但不受觀測器轉子偏差影響,混合型磁鏈觀測器結合兩者優點,通過反饋閉環,較準確地計算了磁鏈角度,參數魯棒性較強,適合應用于直接磁場定向控制系統中。通過仿真得到了驗證。在進一步的工程化實現中,需要解決準確的電壓、電流測量處理方法,克服低開關頻率、高電流諧波對電機控制特性影響等問題。
[1] P.L.Jansen,R.D.Lorenz A Physically Insightful Approach to the Design and Accuracy Assessment of Flux Observers for Field Oriented Induction Machine Drives[J].IEEE Trans on Industry Applications,Vol.30,No.1,Jan/Feb 1994.101-110.
[2] P.L.Jansen,R.D.Lorenz,D.W.Novotny Observer-Based Direct Field Orientation:Analysis and Comparison of Alternative Methods[J].IEEE Trans on Industry Applications.Vol.30,No.4 Jul/Aug 1994:945-953.
[3] W.D.Weigel,D.C.Horstmann.未來機車動車的SIBAS32微機控制系統(上)[J].國外內燃機車.1993,(7):33-40.
[4] W.D.Weigel,D.C.Horstmann.未來機車動車的SIBAS32微機控制系統(下)[J].國外內燃機車.1993,(8):41-48.
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
數學物理學報(2022年1期)2022-03-16 06:14:50
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化(高中版.高考數學)(2017年3期)2017-05-04 07:15:09
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
電子制作(2016年1期)2016-11-07 08:42:44
Coco薇(2016年1期)2016-01-11 16:53:24
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:23
