基于視覺和有向九宮格的晶圓盤遍歷算法及應用
2011-05-10 11:04:44尹周平
制造業自動化 2011年16期
梁 若,熊 波,尹周平,李 敏
(華中科技大學 機械學院 數字制造裝備與技術國家重點實驗室,武漢 430074)
0 引言
RFID射頻識別技術是物聯網的核心技術。由于RFID射頻識別技術與互聯網、通訊等信息技術相結合,可以實現全球范圍內物品跟蹤與信息共享,未來市場需求巨大,對我國制造業的發展意義重大[1-3]。RFID封裝設備,一般由基板輸送、點膠、翻轉貼片、熱壓和檢測五個模塊組成,其中翻轉貼裝模塊是設備最主要部分。
在RFID倒裝設備的翻轉貼裝流程中,如何正確有效的從晶圓盤上拾取芯片,直接影響到封裝的效率和芯片的利用率,是設備關鍵流程。其主要動作流程如下:給定起始芯片,然后晶圓盤驅動單元進給,將晶圓上的每一個好芯片按一定順序,自動的移動到翻轉頭拾取工作范圍,最后由翻轉頭完成芯片的拾取,該過程在本文稱為晶圓遍歷。晶圓遍歷主要解決以下問題[4]:
1)減少人為干預,自動拾取完整個晶圓盤芯片;
2)使拾取路徑連續,盡量縮短每次移動的距離,避免芯片零散遺漏;
3)芯片對位時盡量走最合理的路徑,當暫時找不到芯片的時候能夠向有芯片的區域移動;
4)判斷路徑的時間應該盡量短,提高效率。
晶圓遍歷算法從原理上一般可以分為兩類:1)基于Map文件的遍歷算法:通過讀取保存在Map文件的信息來確定當前芯片的好壞狀態,按照map文件的形式完成芯片拾取的路徑規劃;2)基于視覺的遍歷算法:通過圖像視覺的方法,判斷當前芯片的狀態和位置坐標,再按一定的路徑規劃進行移動翻取。一般基于MAP文件的遍歷較為穩定,但MAP文件格式眾多,且不能適用于含有空洞的wafer盤,其適應性較差。基于視覺的遍歷,適應性好,但其依賴于視覺效果,效率和穩定性較差;文獻 [6]使用視覺的遍歷方式,采用逐行遍歷的路徑規劃,文獻[5]在此基礎上,通過好芯片、壞芯片和邊緣芯片三種狀態進行區分換行,文獻[4]則對十字直角路徑和斜上優先兩種路徑規劃進行了優化。
本文針對以前map遍歷算法和視覺遍歷算法的不足,根據設備的實際需求,在現有基礎上提出了一種新的算法:基于視覺的有向九宮格遍歷算法。該算法已成功應用在RFID倒裝設備上,其適應性和穩定性更好,滿足生產要求。
1 基于視覺的有向九宮格遍歷算法
根據前面的分析,為了克服現有算法的不足,本文提出了一種新的基于有向九宮格的遍歷算法。新算法以視覺遍歷為基礎,有效解決了map遍歷適應性差的問題;同時參考map遍歷直接跳過壞芯片,效率高的特點,采用九宮格視野擴大遍歷范圍,九顆芯片只需一次圖像處理,并且只對好芯片處理,從而解決了現有的視覺遍歷算法對每一個芯片的狀態單獨處理,效率低下的問題;九宮格內采用貪心算法搜索策略,實現九宮格內路徑綜合最優,保證效率;同時提出基于距離的換行標準,大大提高算法穩定性,對算法實際應用很大的促進作用。下面將對算法的原理進行詳細的敘述。
1.1 有向九宮格遍歷算法原理
有向九宮格采用方形的定位視野,視野中分為九個方格,如圖1所示。新算法以九宮格為基本遍歷單元,先把當前九宮格內所有好芯片拾取完成后,驅動機構自動進給到下一個九宮格繼續遍歷。每一個九宮格,只通過一次圖像定位,就可對所有好芯片的狀態定位,進行遍歷;以貪心算法為搜索策略,使得九宮格內搜索總路徑綜合最短。算法主要有以下幾個特點。

1.1.1 基于貪心算法的九宮格路徑搜索策略
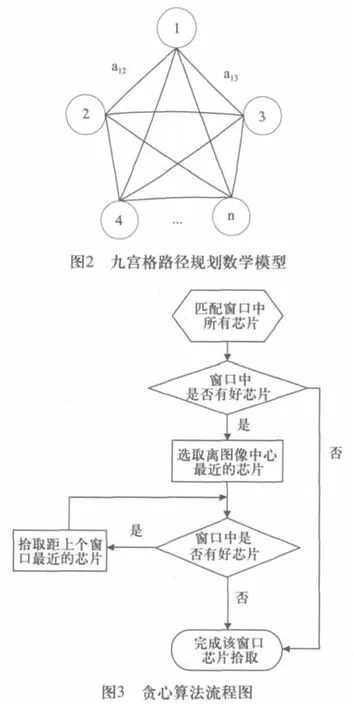
九宮格內拾取芯片時,必須要將好芯片移動到視野正中心方可拾取,因此,九宮格內部芯片拾取的路徑規劃的目的:以最短的搜索路徑拾取完所有好芯片。這是一個典型的路徑規劃問題,如圖3所示。拾取芯片時,通過對好芯片進行圖像匹配處理,可以獲取視野內好芯片的具體位置,但是由于九宮格內部芯片狀態并不固定,每個位置的芯片都存在好芯片或是壞芯片狀態的可能,不同芯片狀態下遍歷路徑也不盡相同。
遍歷的整體效率,是遍歷路徑的總長度和搜索算法時間復雜度兩者的綜合評價。實際工況中,芯片尺寸距離很小,較優解與最優解相差不大,效率影響較小;而貪心算法由局部最優代替全局最優,時間復雜度很低,可以快速獲得最優解或較優解,既能滿足路徑優化,又能實現算法優化。綜合考慮兩者關系,本文采用貪心算法搜索策略。
針對九宮格路徑規劃問題,建立了圖2的數學模型,以連通圖表示表示整個路徑規劃的集合,好芯片以圓圈節點表示,距離以權值表示,視覺匹配處理計算完成后,即可獲得九宮格對應的連通圖。通過選擇當前節點的最優解代替全局最優來實現九宮格內所有好芯片的拾取路徑遍歷,圖3是貪心算法主要流程圖。
1.1.2 基于距離的換行準則
基于視覺遍歷的傳統算法中,以芯片狀態作為換行的準則,其換行依賴于芯片本身的狀態和分布,運行并不穩定。針對這種情況本文提出了一種新的換行準則:根據九宮格當前窗口坐標和wafer圓心半徑的關系,判定是否需要換行。該準則不依賴于晶圓盤上芯片的分布情況,對晶圓盤孔洞和缺角情況都能適應,穩定可靠。該準則的基本原理如下:
1)圓心和半徑:學習晶圓盤邊緣處四個點的坐標,通過四點擬合出wafer圓心和半徑值;
2)換行和進給:每到一個新的九宮格位置,判斷當前視野中心點與先前計算出的圓心之間的距離,并與半徑作差,事先設置一個閾值,當差值大于該閾值時則進行換行動作,否則按照正常的算法流程進行;
3)晶圓盤遍歷結束:當視野中心點與圓心的距離大于半徑,并且在遍歷的垂直方向上的距離也大于半徑,則判斷晶圓盤遍歷結束。
本文采用最小二乘法,求解wafer盤圓心和半徑,半徑為R,圓心(A,B)的圓標準曲線為:

由上可知,三點即可以確定一個圓,所取點數越多,精度越高,由于芯片尺寸小,晶圓盤的半徑遠遠大于芯片半徑,故對精度要求不高,本文中通過采樣四點坐標擬合一個圓。由四點坐標:(x1,y1), (x2,y2),(x3,y3),(x4,y4),代入方程即可求解得到a,b,c,從而得到wafer盤的圓心(A, B)和半徑R。
1.1.3 有向九宮格遍歷
遍歷開始時,指定一個初始遍歷方向,如從左到右遍歷,加工結束后,自動保存當前的遍歷方向和結束位置,下次開啟后可直接遍歷,其操作簡單,且大大提高了遍歷的連續性和適應性;使用九宮格,擴大視野范圍,一次性對九個芯片處理,減少匹配次數,對好壞芯片的狀態,都是一次處理,提高了效率。
1.2 算法的實現
根據前面的介紹,該算法的主要步驟如下:
1)選取起始遍歷芯片:根據實際情況,選擇開始遍歷的起始點;
2)指定遍歷方向:根據起始點狀態和晶圓盤整體情況,確定遍歷方向;
3)圓心半徑確定:確定wafer盤4個邊緣點坐標,由最小二乘法擬合出wafer盤的半徑和圓心;
4)開始遍歷:通過視覺圖像定位,得到當前九宮格內好芯片坐標,由貪心算法遍歷拾取完九宮格內所有好芯片;
5)每到一個新的九宮格位置時,先判斷是否已達到換行標準;如果達到則換行并反向遍歷,否則重復步驟4;
6)判斷是否已遍歷完整個晶圓盤,如果是則進行換料操作,否則按照算法流程,重復步驟4進行。
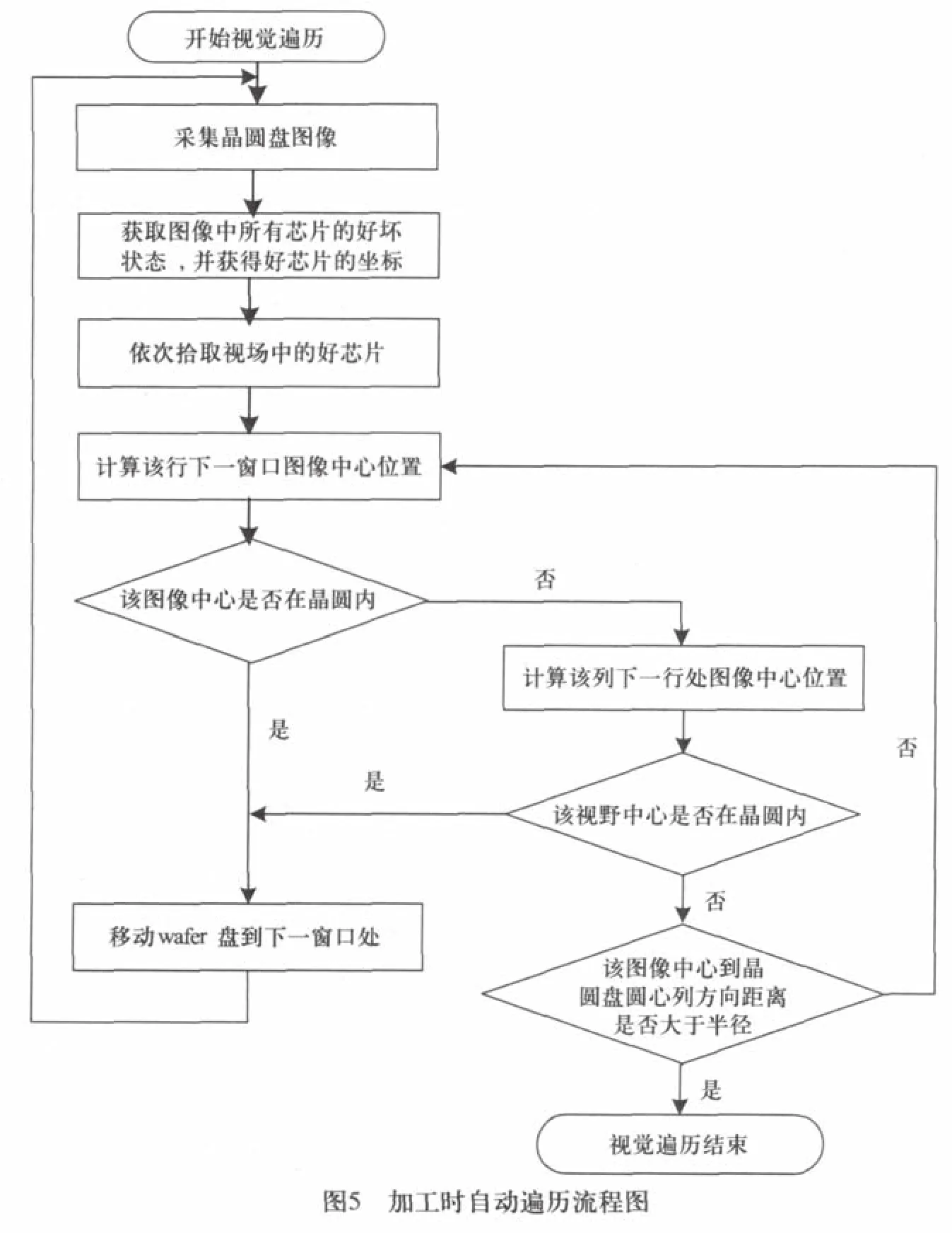
算法的流程圖具體如下:遍歷前的學習準備流程,如圖4所示;加工時的流程,如圖5所示。其中遍歷前的學習流程,為離線操作,并不影響設備的運行效率,一般更換基材后只需要學習一次;加工流程,為自動加工時的在線操作,直接影響設備生產效率。

2 實驗結果
該算法在實際RFID設備中進行實驗,實驗中,將設備頂針頂起的高度,由正常工作高度改為0,既可以完全模擬實際工況又不浪費芯片,同時為了保證采圖的質量和翻轉的效果,在實際過程中,加入了一定延時模擬。
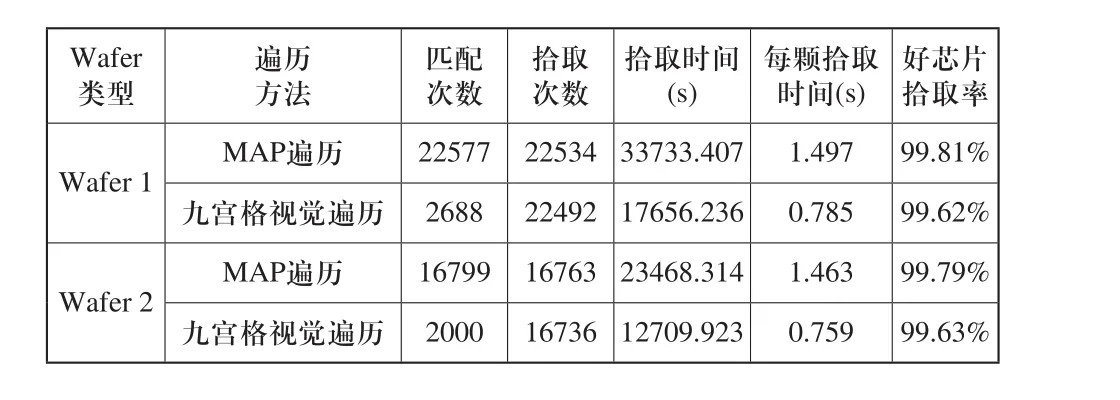
圖6(a)為RFID設備中測試時所用到的wafer盤倒裝翻轉拾取機構。測試中使用了完整晶圓盤和部分已經加工過的晶圓盤兩種。wafer盤1為完整晶圓盤,芯片總數23936,好芯片總數22577,合格率為94.322%;wafer盤2是部分加工過的晶圓盤,前60行已經被拾取,剩余wafer盤芯片總數17707,好芯片總數16799,合格率為94.87%。在原理上,不管是在效率、穩定性、性能上,九宮格遍歷肯定要遠遠好于視覺逐行遍歷算法,因此實驗中,主要與MAP遍歷做了比較,表1是實驗的部分結果。
上述測試效果表明,九宮格視覺遍歷拾取率與MAP遍歷相比基本無變化,但是其效率卻遠遠高于MAP遍歷。同時,通過視覺觀察到實驗中未拾取的芯片,有部分的外觀確實存在破損或者變臟,這可能是晶圓盤在轉移的過程中導致了芯片的損壞,這也是為什么MAP遍歷拾取率沒有100%的原因,所以實際拾取率會比實驗結果略高。實驗中都是一次性遍歷完成,中間并無停頓,穩定性很好。
另外,本次實驗還使用了另外兩種有空缺的wafer盤:圖6(a)為單方向含孔洞晶圓盤;圖6(b)為垂直方向含雙孔洞晶圓盤。實驗結果表明,對以上兩種晶圓盤,九宮格遍歷,并無影響,遍歷時間、穩定性和拾取率和上面基本無差別。但對于MAP遍歷而言,單方向含有孔洞晶圓盤,遍歷過程中,需要停頓一次進行重新學習調整(停頓次數一般為孔洞個數);對于圖6(b)晶圓盤,則直接失效,不能遍歷。另外,由于MAP遍歷中,MAP文件格式太多,有時候會出現格式不兼容情況,而視覺遍歷都能適用。
實驗表明,不管是對何種晶圓盤,該算法能在效率、穩定性和拾取率上能達到綜合較優,智能性和適應性上都有了一定的提高,目前該算法已成功應用到實際RFID設備中。

實際測試中,該算法也存在一定的不足:1)由于其是基于視覺定位的,芯片狀態的確定依賴于視覺系統處理效果;2)對空缺的晶圓盤,不需要停機保證了連續性,但是仍然會遍歷晶圓盤空缺的地方,效率有所降低。對于這些不足,特別是視覺圖像的處理效果,是后面需要進一步完善的地方。
3 結論
本文的最大貢獻之處在于提出了一種有向九宮格遍歷算法,有效克服了map文件遍歷算法中適應性差、效率低,視覺遍歷算法中效率低、穩定性差等問題。通過采用視覺遍歷,解決MAP遍歷適應性低的問題;以九宮格為基本單元,引入貪心算法、有向遍歷和距離換行準則,大大提高其效率和穩定性。該算法已成功應用在RFID封裝設備中,應用結果表明,其適應性、穩定性和效率都有一定的提高,能夠滿足工業實際生產應用要求。
[1] 張智文, 射頻識別技術理論與實踐[M]. 北京: 中國科學技術出版社, 2008.
[2] 陶玉芬, RFID應用技術展望[J]. 電腦技術應用, 2006.
[3] 陳劍, 冀京秋, 陳寶國, 我國射頻識別(RFID)技術發展戰略研究[J]. 科學決策, 2010(1).
[4] 劉桿. 厚膜LED粘片機晶圓拾取路徑方法研究[D]. 長春:中國科學院長春光學精密機械與物理研究所, 2006.
[5] 劉輝. RFID標簽封裝設備中機器視覺系統設計與實現[D]. 武漢: 華中科技大學, 2006.
[6] 魏婷. RFID封裝線預綁定模塊的視覺與運動集成研究[D]. 上海: 上海交通大學, 2007.
[7] 李曉峰, 趙海, 杜洪軍, 劉小勇, 柔性流水作業排序問題的貪心算法求解[J]. 吉林大學學報(信息科學版),2009(6).
[8] 姜永軍, 吳小洪, 何漢武, 羅丁, 姜石軍. 圖像識別系統在IC封裝設備中的應用[J]. 半導體技術, 2005, 30(1).
[9] 丁漢, 朱利民, 林忠欽.面向芯片封裝的高加速度運動系統的精確定位和操作[J]. 自然科學進展, 2003, 13(6).
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
商周刊(2017年9期)2017-08-22 02:57:49
工業設計(2016年12期)2016-04-16 02:52:00
設備管理與維修(2015年12期)2015-04-09 06:57:00
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛生(2014年11期)2014-11-12 13:11:32
