基于UKF 的電力系統(tǒng)動態(tài)狀態(tài)估計
2011-06-01 14:05:50李少華
重慶電力高等專科學(xué)校學(xué)報 2011年6期
李少華,金 濤
(福州大學(xué)電氣工程與自動化學(xué)院,福建福州350108)
式中,f是非線性狀態(tài)轉(zhuǎn)移函數(shù),g是代數(shù)方程組,表示電力系統(tǒng)無源網(wǎng)絡(luò)。計算步驟如下:
①按照式(2),用mk-1作為狀態(tài)均值獲取sigma點,并且計算狀態(tài)估計均值m*k:
0 引言
電力系統(tǒng)狀態(tài)估計作為能量管理系統(tǒng)(EMS)的重要組成部分,發(fā)揮著重要的作用[1]。至今,世界上絕大部分電網(wǎng)已經(jīng)在正常運行中使用了狀態(tài)估計程序,其在電力系統(tǒng)中所得到的效果已被充分肯定。它能夠利用網(wǎng)絡(luò)接線信息和實時量測信息估計出完整、一致和可信的系統(tǒng)狀態(tài)。從理論上講,它就是根據(jù)數(shù)據(jù)采集和監(jiān)控系統(tǒng)(SCADA或PMU)采集的信息,以求解非線性方程組的迭代方法求得系統(tǒng)狀態(tài)變量(母線電壓的幅值和相角)的最佳估計值。
電力系統(tǒng)狀態(tài)估計問題已經(jīng)得到了廣泛的重視,國內(nèi)外研究人員提出了大量算法。當(dāng)然,由于一些實際原因,這些算法存在著一定的缺陷[2],如占用內(nèi)存大、估計精度不高等。近年來,由于擴展卡爾曼濾波(EKF)算法簡單、容易實現(xiàn)、快速收斂等優(yōu)點,電力系統(tǒng)動態(tài)狀態(tài)估計主要以EKF理論為基礎(chǔ)[3]。文獻[4]將EKF算法應(yīng)用到了電力系統(tǒng)動態(tài)狀態(tài)估計中。但EKF算法在實際使用中存在明顯的缺陷:一是線性化有可能產(chǎn)生極不穩(wěn)定的濾波;二是EKF需計算雅克比矩陣的導(dǎo)數(shù),這在多數(shù)情況下不是一件容易的事[5]。近年來,無跡卡爾曼濾波(UKF)算法在導(dǎo)航、測軌、衛(wèi)星定位、導(dǎo)彈狀態(tài)估計、語音識別等領(lǐng)域得到了廣泛應(yīng)用[6]。此算法能有效地克服EKF的不足,取得比EKF更高的估計精度,而且不用求取雅克比矩陣,計算復(fù)雜度也小于EKF法,在電力系統(tǒng)狀態(tài)估計中應(yīng)用容易實現(xiàn)。目前,UKF算法尚未應(yīng)用在電力系統(tǒng)狀態(tài)估計中。
1 UT變換
UT變換是一種計算一個隨機變量的非線性變換的統(tǒng)計量的方法[5]。它是UKF算法的核心和基礎(chǔ)。UT變換的思想是用固定數(shù)量的參數(shù)去近似一個高斯分布,這比近似任意的非線性函數(shù)或變換更容易。實現(xiàn)原理是在原狀態(tài)分布中按某一規(guī)則取一些點,使這些點的均值和方差近似等于原狀態(tài)分布的數(shù)學(xué)期望和方差;將這些點代入非線性函數(shù)中,相應(yīng)得到非線性函數(shù)值點集,并求取變換后點集的均值的方差[7]。
2 UKF算法
對于非線性系統(tǒng),可用下面的非線性離散時間狀態(tài)轉(zhuǎn)移方程和觀測方程來表示:

其中,xk∈Rn是在k時刻的狀態(tài)變量,zk∈Rm是k時刻的量測量;f和h是非線性向量方程;qk~N(0,Qk)是k時刻的高斯白噪聲,rk∈N(0,Rk)是k時刻的測量噪聲;Qk和Rk是k時刻qk和rk的方差。算法步驟如下:
①預(yù)測:用mk-1作為狀態(tài)均值獲取sigma點,并且計算狀態(tài)估計均值 ^mk和估計方差^pk:
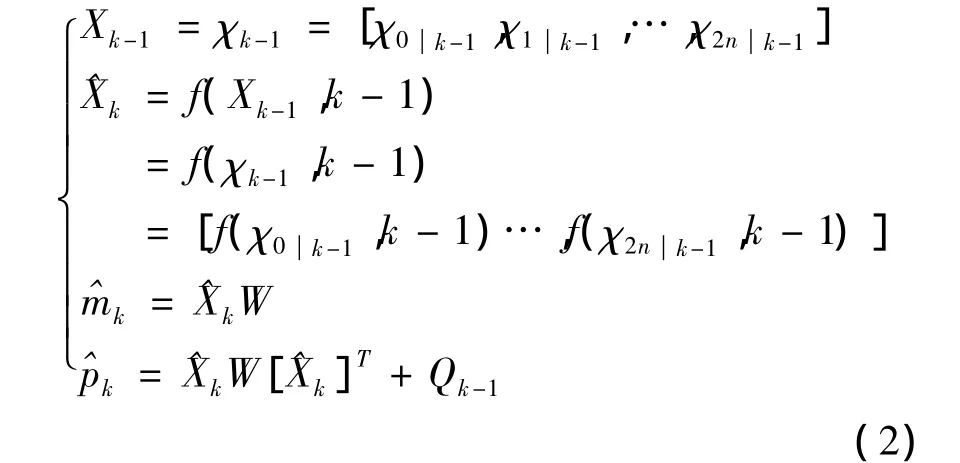
式中,W=[W0,…,W2n]T,χk-1是n×(2n+1)矩陣,χik-1是n維向量。
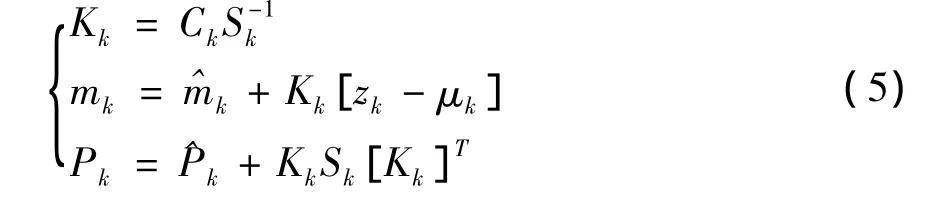
③計算濾波增益Kk和更新的狀態(tài)均值mk和協(xié)方差pk:
3 電力系統(tǒng)動態(tài)狀態(tài)估計
本節(jié)將前面介紹的濾波算法運用到電力系統(tǒng)中。電力系統(tǒng)模型通常用如下微分方程組描述:

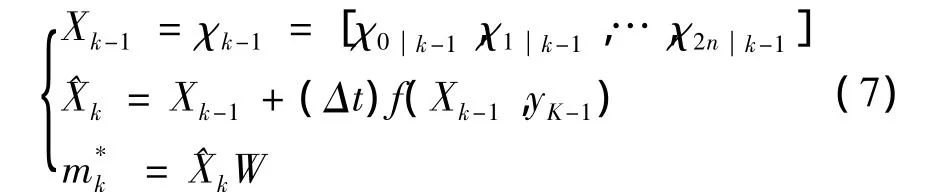
式中,f是非線性狀態(tài)轉(zhuǎn)移函數(shù),g是代數(shù)方程組,表示電力系統(tǒng)無源網(wǎng)絡(luò)。計算步驟如下:
①按照式(2),用mk-1作為狀態(tài)均值獲取sigma點,并且計算狀態(tài)估計均值m*k:

③計算狀態(tài)估計均值 ^mk:

④計算^yk,解方程:

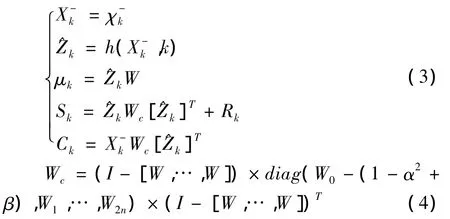
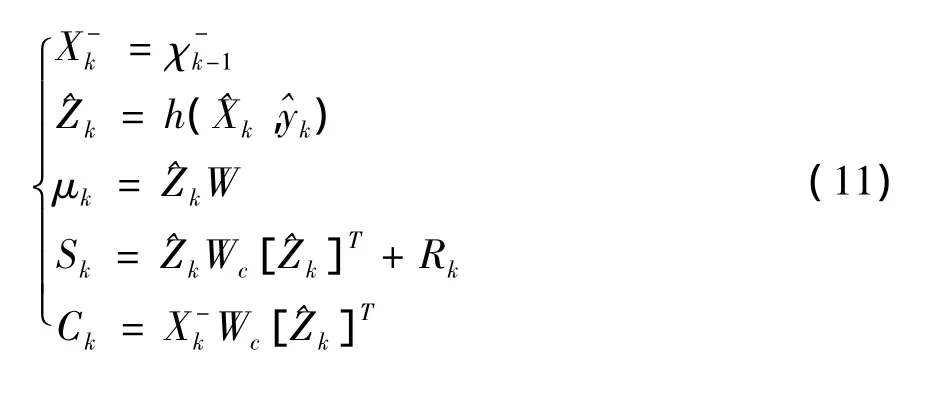
⑤按照式(3),計算估計均值,量測量的估計均值μk和協(xié)方差Sk,以及狀態(tài)量和量測量的協(xié)方差Ck:
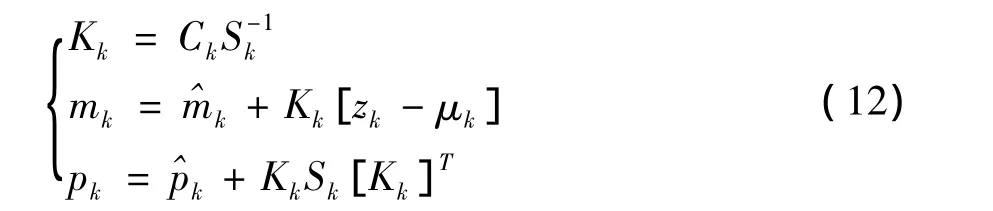
⑥計算濾波增益Kk和更新的狀態(tài)均值mk及協(xié)方差pk:
4 仿真算例
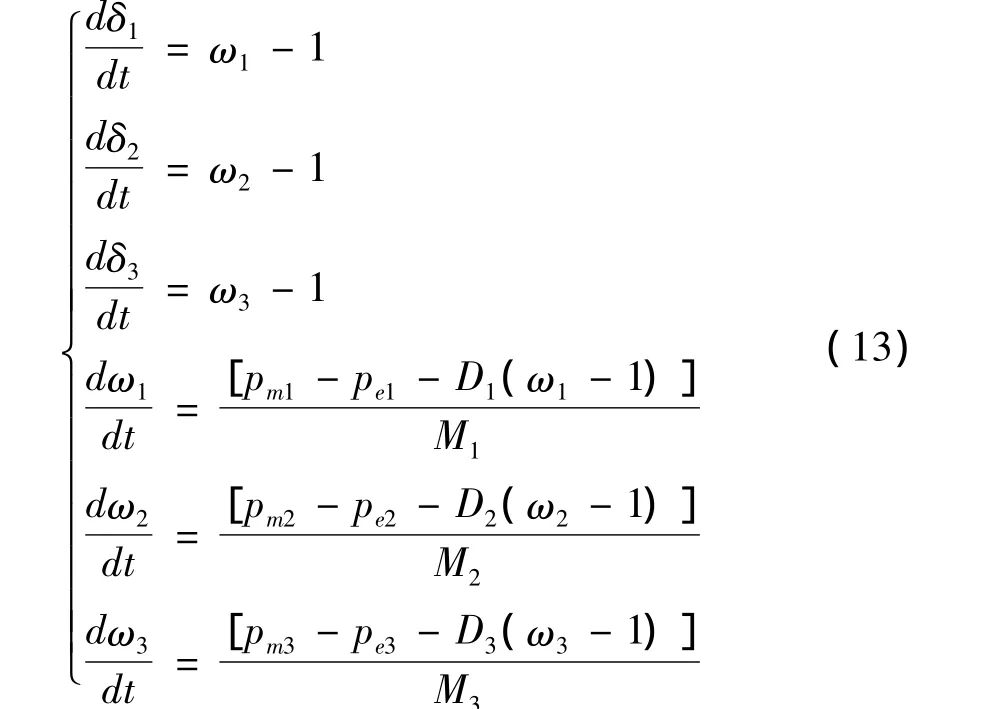
本節(jié)將UKF算法在9節(jié)點系統(tǒng)(如圖1)中仿真、試驗。在仿真系統(tǒng)模型中,發(fā)電機的動態(tài)用功角δ和角速度ω作為狀態(tài)變量來表示。全部的狀態(tài)變量是 δ1,δ2,δ3,ω1,ω2,ω3。狀態(tài)轉(zhuǎn)移方程如下:
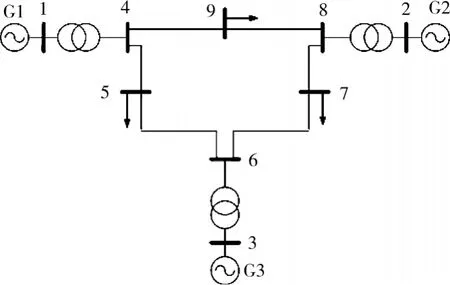
圖1 9節(jié)點系統(tǒng)接線圖
量測方程如下:
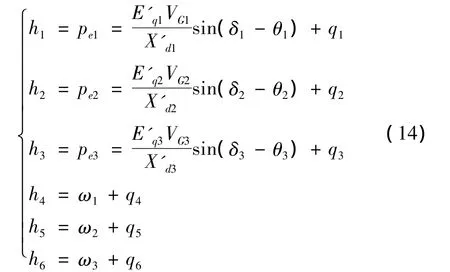
其中,VG和θ表示發(fā)電機輸出電壓的幅值和相角;E'q表示發(fā)電機內(nèi)電壓;q表示量測噪聲;Pe1,Pe2,Pe3表示發(fā)電機輸出電功率。發(fā)電機相關(guān)動態(tài)參數(shù)如表1所示。
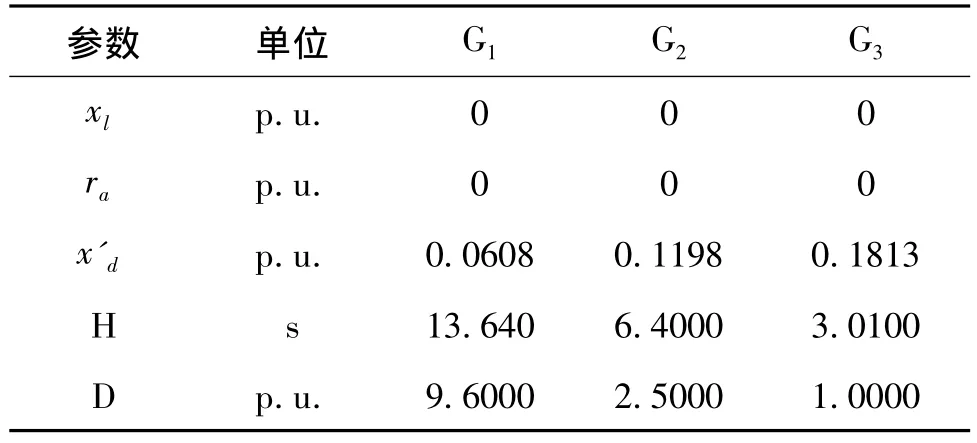
表1 發(fā)電機動態(tài)參數(shù)(Sb=100MVA)
在發(fā)電機G1的輸入機械功率上設(shè)置小的干擾:t=1s時,輸入機械功率以步長0.01p.u.遞增,100ms之后復(fù)位。在式(7)和(9)中,Δt=0.01s。在電功率上加一個幅值為0.001p.u.的隨機噪聲,在轉(zhuǎn)子轉(zhuǎn)速上加一個幅值為0.00002p.u.的隨機噪聲。在上述的擾動下,測量值和真實值的對比見圖2和圖3,每個圖中,上面是測量值的波形,下面是真實值的波形。
根據(jù)UKF算法用含噪聲的量測量去估計真實值,結(jié)果見圖4~5,圖中實線表示真實值,虛線表示估計值。從圖中可以看出:在有噪聲的情況下,該算法能較好地估計真實值。然而,從圖4~5也可以看出,在t=1s之前,估計值和真實值間有較大偏差。通過分析圖2~5,可以得出,估計偏差是由在0<t<1期間測量信號信噪比較低造成的。
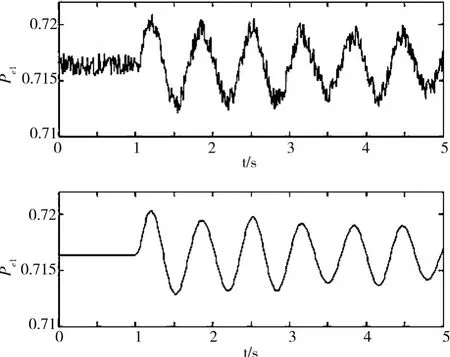
圖2 Pe1的測量值和真實值
5 結(jié)語
本文介紹了一種基于UT變換的不敏卡爾曼濾波算法(UKF),并將其應(yīng)用到電力系統(tǒng)動態(tài)估計中,最后在9節(jié)點系統(tǒng)中仿真、試驗。通過仿真算例可以看出,該算法可以較好地克服電力系統(tǒng)的非線性,而且有較高的估計精度。總之,UKF算法主要有以下優(yōu)點:

圖3 ω1的測量值和真實值
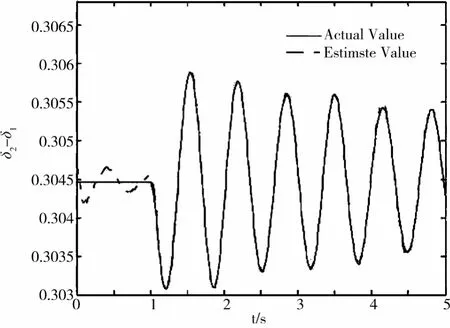
圖4 δ2-δ1的真實值和估計值
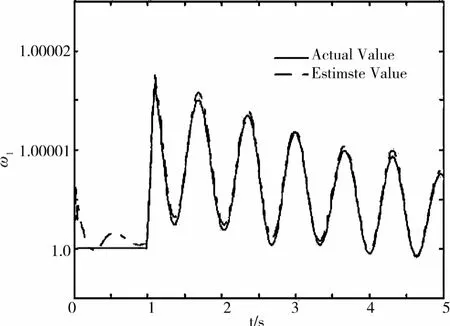
圖5 ω1的真實值和估計值
(1)不需要計算雅克比矩陣來對非線性函數(shù)作近似變換,計算量小;
(2)能對所有高斯輸入量的非線性函數(shù)進行近似,均值精確到三階,方差精確到二階;
(3)有較好的魯棒性。
[1]李先彬.電力系統(tǒng)自動化[M].北京:水利電力出版社,1986:124-125.
[2]于爾鏗.電力系統(tǒng)狀態(tài)估計[M].北京:水利電力出版社,1985.
[3]DEBS A S,LARSON R E.A Dynamic Estimator for Tracking the State of a Power System[C].IEEE Trans on Power Apparatus and Systems,1970,89(7):107-113.
[4]Huang Z,Schneider K,Nieplocha J.Feasibility Studies of Applying Kalman Filter Techniques to Power System Dynamic State Estimation[J].Singapore:Proc.8th International Power Engineering Conference,2007:376-382.
[5]唐波,崔平遠,陳陽舟.Unscented卡爾曼濾波在狀態(tài)估計中的應(yīng)用[J].計算機仿真,2006,(4):82-120.
[6]顧飛飛,唐隴軍,孫勇,等.面向事件的智能化電網(wǎng)調(diào)度運行日志管理系統(tǒng)[J].電力系統(tǒng)自動化,2010,(4):1-4.
[7]周鳳岐,盧曉東.最優(yōu)估計理論[M].北京:高等教育出版社,2009:149-150.
猜你喜歡
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
大電機技術(shù)(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電力工程技術(shù)(2014年1期)2014-03-20 14:19:06