直流架線式礦用電機車變頻調速控制系統的設計
2011-06-02 05:30:24栗忠魁陳名輝
電機與控制應用 2011年5期
關鍵詞:系統
栗忠魁, 阮 毅, 宗 劍, 陳名輝, 陳 佳
(1.上海大學機電工程與自動化學院,上海 200072;
2.華中科技大學控制工程與科學系,湖北武漢 430074)
0 引言
礦用電機車采用直流電機驅動,因維護量大、維修費用高等問題面臨技術改造;交流調速系統取代直流調速系統成為必然趨勢[1]。
礦用電機車通常工作在比較惡劣的環境中[2-3]。供電系統穩定性差、軌道高低不平,致使供電很不穩定;機車需要頻繁起動、制動、加速、減速,還要適應上、下坡和顛簸路況等情況。因此,在實際的工況中,要求電力機車的調速系統具有:帶載能力強、起動轉矩大、動態響應快,對瞬時斷電、供電電壓波動有很強的適應能力。針對上述要求,設計了基于無速度傳感器的礦用電機車調速系統,試驗證明該系統具有起動力矩大,魯棒性好等優點。
1 礦用架線式電機車變頻調速系統控制方案
1.1 異步電動機按轉子磁鏈定向的矢量控制系統
異步電動機具有非線性、強耦合、多變量等性質,要獲得良好的調速性能,必須從動態模型出發。矢量控制系統通過坐標變換和按轉子磁鏈定向,可以將異步電動機動態模型等效為直流電動機模型,進而通過控制等效直流電動機來達到對異步電動機的控制[4]。
經過坐標變換得到異步電動機在任一旋轉坐標系下的數學模型。
電壓方程:
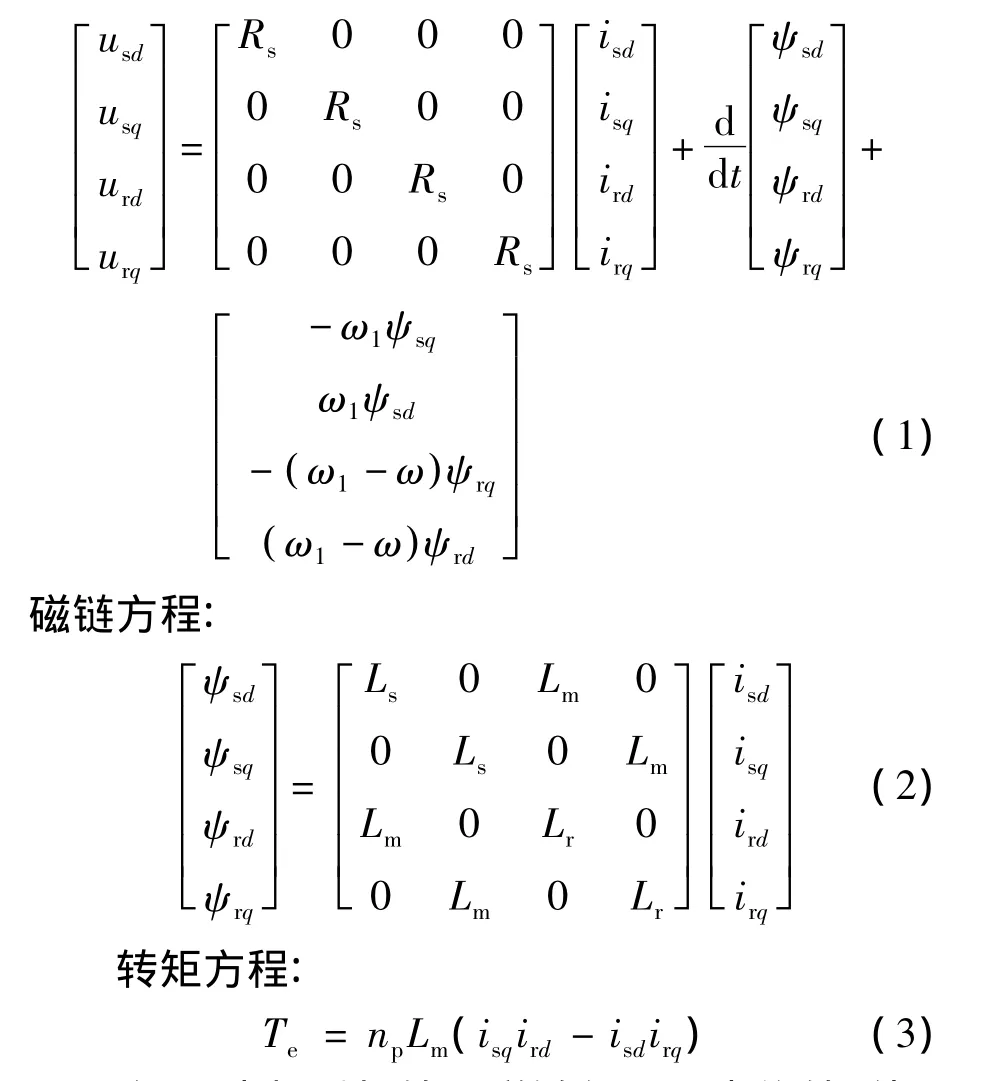
令dq坐標系與轉子磁鏈矢量同步旋轉,使d軸與轉子磁鏈矢量重合,即為按轉子磁鏈定向同步旋轉坐標系mt。由于m軸與轉子磁鏈矢量重合,則:
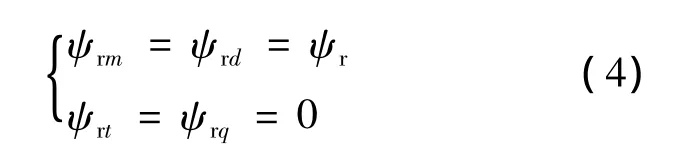
為保證m軸與轉子磁鏈矢量始終重合,還應滿足:

按轉子磁鏈定向同步旋轉坐標系mt中狀態方程:
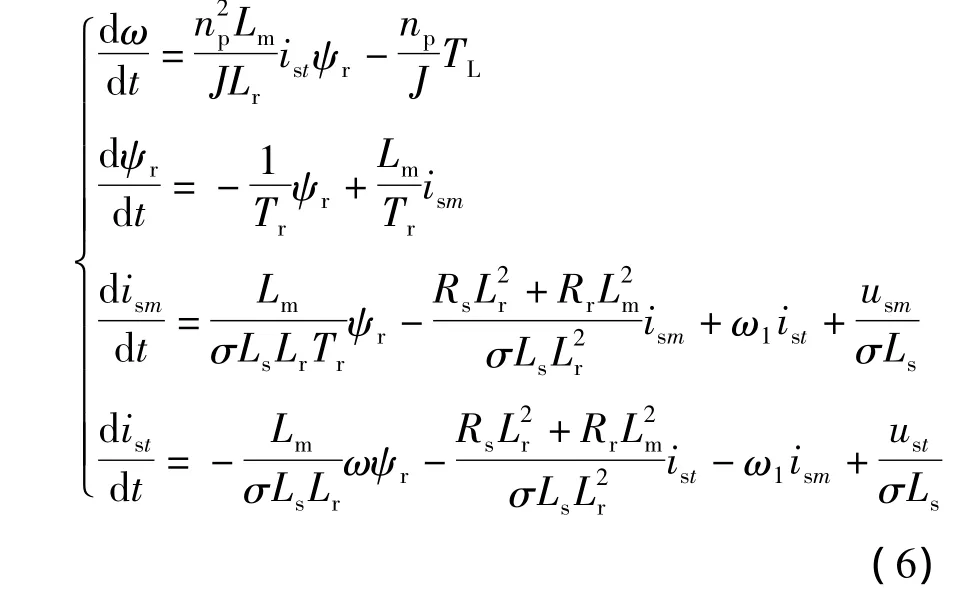
由式(6)可以得出:
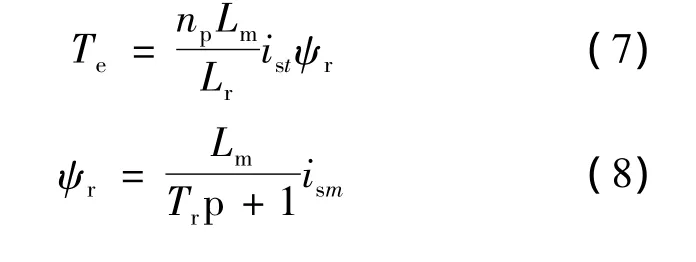
ω——電機轉速;
ω1——同步轉速;
ωs——轉差;
ψ——磁鏈;
np——極對數;
下標 r、s——轉子、定子。
經過坐標變換和按轉子磁鏈定向,三相異步電動機變成一臺由ism和ist為輸入,ω為輸出的直流電動機。m繞組相當于直流電動機的勵磁繞組,ism相當于勵磁電流,t繞組相當于電樞繞組,ist相當于電樞電流。
1.2 無速度傳感器
電機車工作環境復雜,機械振動、電磁干擾等會影響轉速編碼器的正常工作,給系統帶來不穩定因素,因此采用無速度傳感器進行轉速估算。
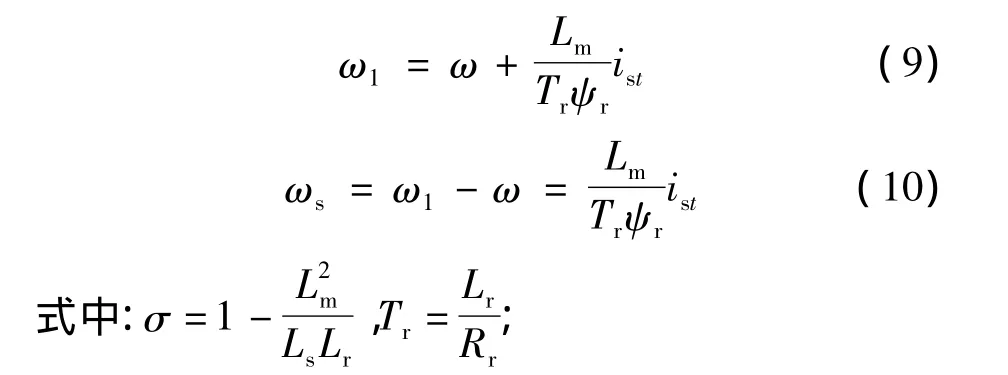
根據式(6),將 ω用 ω1-ωs代替,又由于Tr=Lr/Rr,可以得出:

化簡得到:

式(12)表明,可以根據定、轉子電感,勵磁電流ism,轉矩電流ist,轉子磁鏈 ψr和轉矩電流 ist的微分計算得到同步轉速ω1。再結合式(10)可得到估算轉速:

磁鏈角可以由同步轉速得到:

無速度傳感器結構圖如圖1所示,矢量控制系統總體結構如圖2所示。
2 電機車調速系統組成
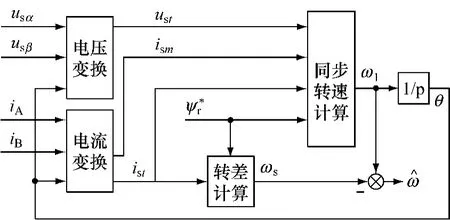
圖1 轉速估算結構圖
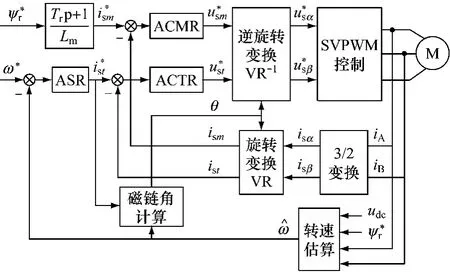
圖2 采用無速度傳感器的轉速閉環磁鏈開環矢量控制系統結構圖
電機車的整個調速系統由司機室操作臺、控制系統、電機驅動模塊、異步電動機等組成,調速系統總體結構如圖3所示。操作臺上包括起動/停止、加速/減速控制手柄,加速/減速控制手柄同時提供剎車、前進、后退等控制信號,控制系統包括主控制器及各輔助模塊。
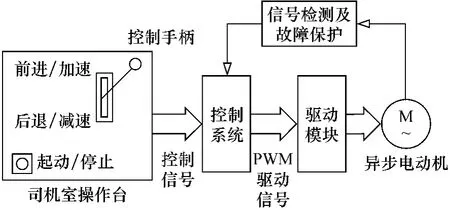
圖3 硬件總體結構圖
控制系統軟件主要由主程序和四個功能模塊組成。主程序主要完成系統初始化,四個功能模塊分別為脈寬調制(Pulse Width Modulation,PWM)模塊、故障處理模塊、CAN通信模塊、運行狀態檢測模塊。軟件流程圖如圖4所示。
圖4中,“初始化”完成系統硬件配置、資源分配和部分共用變量聲明;“運行狀態檢測”進行電機轉速估算,電流、電壓檢測;“空間矢量脈寬調制(System Vector Pulse Width Modulation,SVPWM)控制”完成矢量控制的核心功能,包括坐標變換、轉速閉環控制、磁鏈角計算及PWM信號生成等;“CAN通信”根據用戶PC機設定,向用戶提供所需數據。
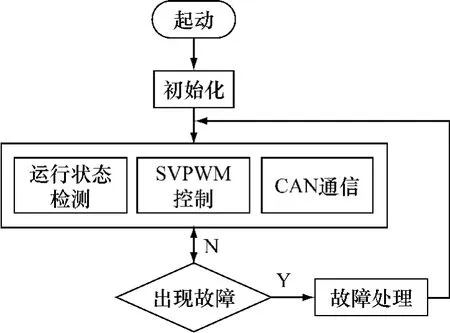
圖4 控制系統結構框圖
架線式電機車由交流電網整流提供直流電源,為保證供電不穩定情況下系統能夠穩定運行,在直流母線上并聯電容器和蓄電池。安裝一個80線轉速編碼器對電機運行狀態進行檢測,以保證機車在上下坡、打滑、過載等情況下的安全和穩定。系統采用Microchip dsPIC30f6010A作為核心控制芯片,調速系統總體結構如圖5所示。
3 試驗
為驗證方案的可行性,在3 kW異步電動機上進行試驗,電機銘牌參數如下:fN=50 Hz、nN=1 400 r/min、UN=380 V、IN=6.9 A。
圖6所示分別為給定轉速在 ±800 r/min、±1 400 r/min范圍內變化的實際轉速與估算轉速,由圖可以看出,該系統所采用的無速度傳感器能夠準確跟隨實際轉速。
圖7所示為上位機軟件通過CAN通信得到電機起動和突加、突減負載時電機的運行情況。由圖7可以看出,電機起動時由于轉速較低,電流迅速上升到限幅,到達給定轉速之后電流下降,突加、突減負載時,電機能夠快速響應,電流能夠很好地跟隨負載的變化而變化。
另外,在22 kW電機上進行了試驗,電機參數如下:fN=40 Hz、nN=590 r/min、UN=380 V、IN=49 A、Te=356 N·m。在堵轉情況下,電機可以輸出2倍額定的轉矩,可以滿足礦山電機車的需要。
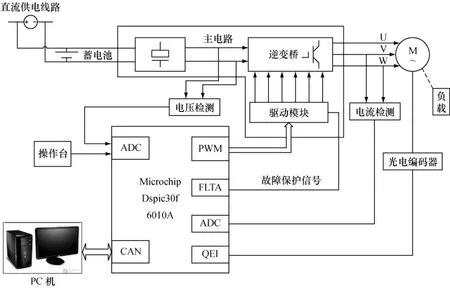
圖5 調速系統總體結構圖
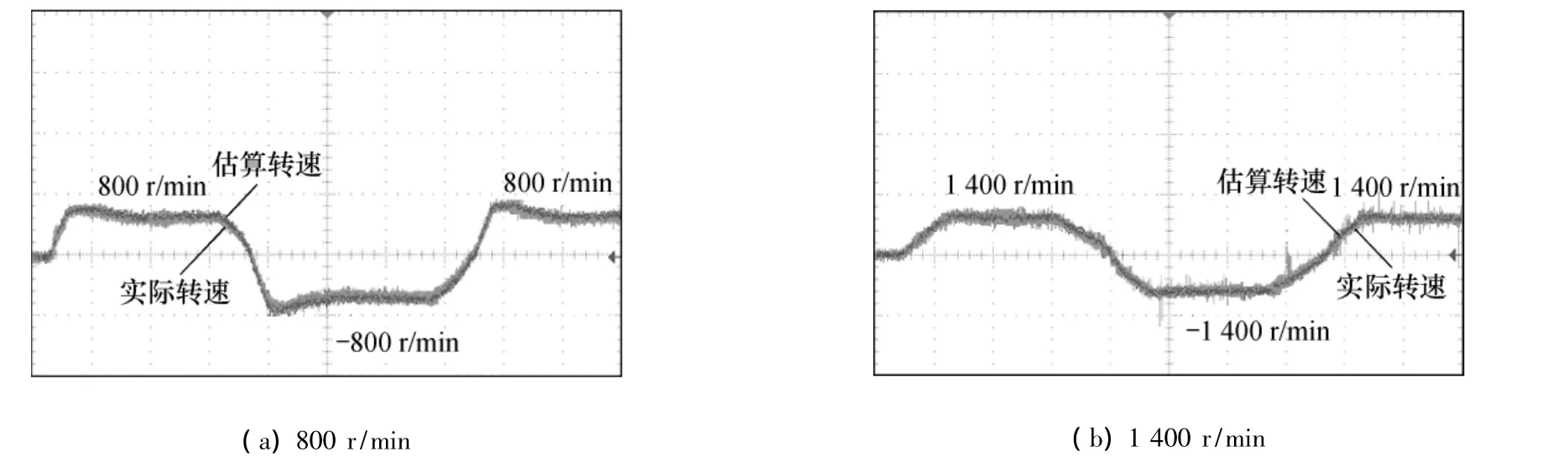
圖6 不同給定轉速下的實際轉速和估算轉速
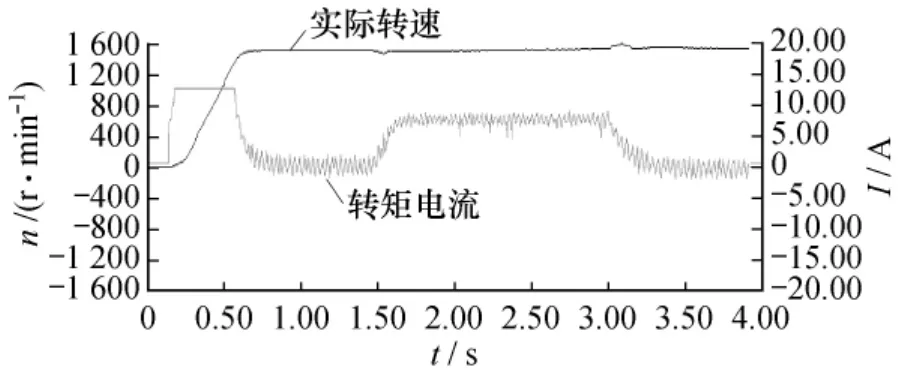
圖7 電機起動和突加、突減負載時電機的轉速、電流波形
4 結語
采用無速度傳感器和矢量控制算法,設計了一套直流架線式礦用電機車變頻調速系統。在3 kW和22 kW電機上進行試驗,無速度傳感器估算準確,系統結構簡單,魯棒性好,動態響應快,可以大轉矩、大電流工作,能夠適應礦用電機車特殊的工作環境。
[1]王淑芳,楊智勇,席巍.礦用電機車調速控制系統研究[J].金屬礦山,2009(8):101-105.
[2]張毅,阮毅,張毅鳴,等.基于dsPIC6010的牽引型變頻器控制系統設計[J].電機與控制應用,2009(2):3-6.
[3]顧軍,許青春.直接轉矩控制在礦用電機車交流傳動上的應用[J].煤礦機械,2006(8):140-143.
[4]阮毅,陳維鈞.運動控制系統[M].北京:清華大學出版社,2006.
[5]Lee Z G,Jeong S K,You S S.Robust control against rotor resistance variation for speed sensorless induction motors[C]∥IEEE International Conference on Electric Machines and Drives,2005,15(1):444-449.
[6]楊霞.變頻調速系統在礦用蓄電池電機車的應用研究[J].煤礦機電,2008(3):13-15.
[7]姜孝華,金濟,王湘,等.無速度傳感器控制礦用電力機車牽引變頻調速器[J].電力電子技術,2006(3):83-85.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32