基于復合前饋控制的交流位置伺服系統動態特性
2011-06-02 09:54:04鄒金紅朱玉川
電機與控制應用 2011年1期
鄒金紅, 朱玉川
(贛江職業技術學院,江西南昌 330108)
0 引言
將永磁同步電動機(Permanent Magnet Synchronous Motor,PMSM)位置伺服系統采用電流控制、速度控制和位置控制分開進行,實現三環串級控制可以獲得更加可靠的伺服性能和動態跟蹤性能。其傳統串級控制策略中,電流環采用滯環控制方式,保證電流環的快速響應。速度環采用PI控制規律,以保證進行穩定的速度控制,使其定位時不產生振蕩。位置環通常采用比例控制規律來保證位置控制的高精度和良好的跟蹤性能。由這種經典控制組成的串級控制結構雖然具有結構簡單、可靠性強、穩態精度高、實現容易等諸多優點,但系統的快速性、動態跟蹤精度、抗干擾能力,以及對系統參數攝動的魯棒性都不夠理想。在位置伺服系統要求速度跟蹤和加速度跟蹤時,這種經典控制不能滿足其位置控制的快速、高精度的要求[1]。本文研究了將復合前饋控制策略應用到交流位置伺服系統的位置環控制器設計,從而組成PMSM位置伺服系統串級復合控制器。該結構不僅可解決單一滑模控制器控制位置和速度變量帶來的系統限幅問題,還進一步增強了系統抗干擾能力,提高了其動態跟蹤精度,具有良好的控制性能。
1 PMSM位置伺服系統組成
本文將永磁同步伺服電動機應用于位置伺服系統,構成數字交流伺服系統,即以交流永磁同步伺服電動機為執行元件,系統速度環和位置環控制采用數字控制,其電氣結構原理如圖1所示。
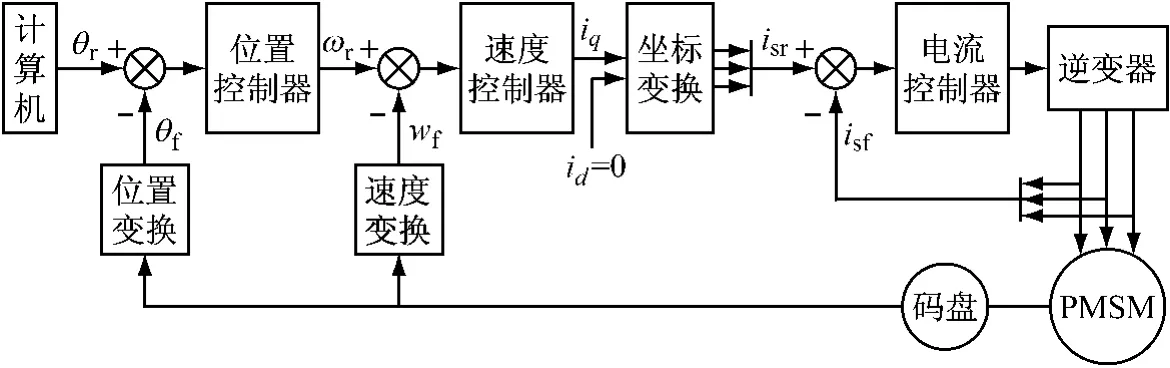
圖1 PMSM位置伺服系統結構原理圖
2 基于磁場定向控制的PMSM線性化解耦數學模型
永磁同步伺服電動機的模型是一個多變量非線性的狀態模型,為使伺服系統控制靈活、方便,響應快,控制精度高,必須實現交、直軸電流的解耦控制,電流解耦控制雖然得到的是近似線性解耦模型,但卻容易實現,只要采用比較好的處理方式,該方法不僅能夠獲得快速高精度的力矩控制,而且控制電路簡單,實現較方便,且使三相永磁同步伺服電機在動、靜態均能得到近似解耦控制[2-3]。采用按轉子磁極位置定向的矢量控制可以認為定子電流勵磁分量Id≡0。為分析簡化,作如下建模假設:(1)忽略飽和效應;(2)電動機氣隙磁場均勻分布,感應反電動勢呈正弦波狀;(3)磁滯及渦流損耗不計;(4)轉子上無勵磁繞組。
根據以上假設,如圖2所示,可寫出轉子坐標系即dq坐標系下系統的線性化數學模型。
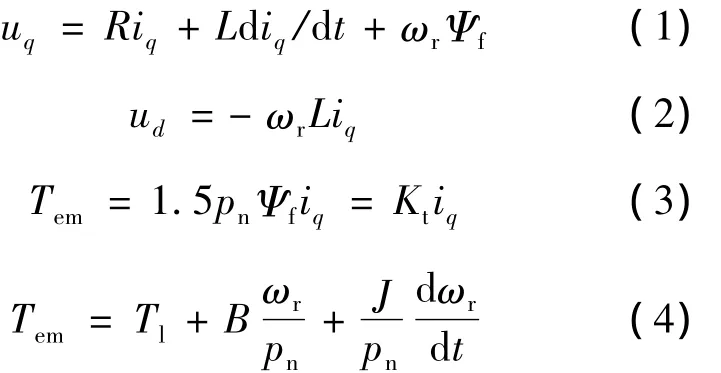
式中:ud,uq——dq坐標系上的電樞電壓分量;
id,iq——dq坐標系上的電樞電流分量;
L——dq坐標系上的等效電樞電感(L=Ld=Lq);
R,ωr——電樞繞組電阻和dq坐標系的電角速度;
Ψf,pn——永久磁鐵對應的轉子磁鏈和電機極對數。
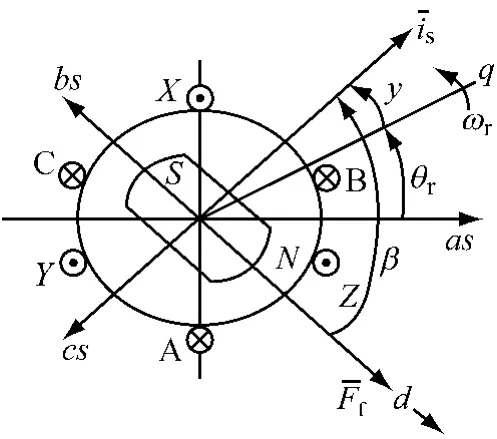
圖2 PMSM轉子坐標系
3 控制器設計
3.1 速度環控制器設計
交流位置伺服系統速度控制器采用數字式PI控制,根據PMSM數學模型將三個獨立的電流環用一個等效的轉矩電流環代替,速度反饋系數為Kw。在PMSM位置伺服系統中電流環節可以等效成為一階慣性環節,選擇速度環控制器為PI調節器,其傳遞函數為G(s)=Ks(1+1/Tss),Ks、Ts分別為速度環調節器的放大倍數和積分時間常數,則速度環PI控制動態結構如圖3所示[4-5]。
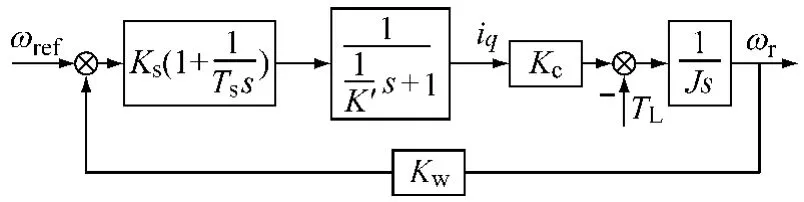
圖3 速度環PI控制動態結構框圖
根據圖3,可得出速度環的開環傳遞函數:
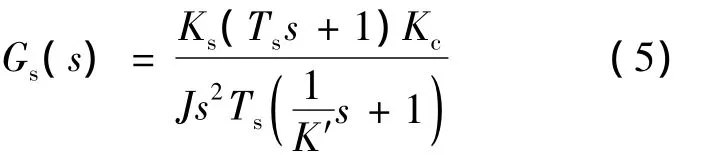
由式(5)可知,轉速環可以按典型的Ⅱ型系統來設計。定義變量h為頻寬,根據典型Ⅱ型系統設計參數公式:
3.2 位置環復合前饋控制器設計
3.2.1 比例控制
作為連續的跟蹤控制,交流位置伺服系統不希望位置出現超調和振蕩,以免造成位置控制精度下降。因此,位置一般采用比例調節器,將位置伺服系統校正為典型的Ⅰ型系統。為保證控制精度,減小穩態運行時的位置偏差,應盡可能提高位置控制增益,并選擇盡可能低的跟蹤速度,經典位置環控制就是采用比例控制。
由于位置伺服系統要求快速響應并且無超調,所以應使位置伺服系統處于臨界阻尼或過阻尼狀態。當校正后速度控制環節的截止頻率1/T1確定后,位置環增益KP可由ζ≥1這個條件確定:

其中:KP=1/4T1時為最優位置控制環增益。
3.2.2 復合前饋控制器設計
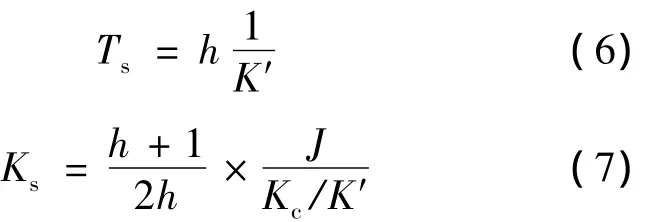
由于交流位置伺服系統位置環截止頻率遠小于速度環各時間常數的倒數,速度環的閉環傳遞函數可近似等效為一階慣性環節,這樣的處理在理論和實踐中均能真實反映速度環的特性,并且能使位置環的設計大大簡化,也易于分析伺服系統的穩定性等。交流位置伺服系統位置環復合前饋控制等效結構圖如圖4所示。
圖4 位置環復合前饋控制等效結構圖
根據式(9)考慮對交流位置伺服系統速度跟蹤信號和正弦跟蹤信號進行前饋補償,則前饋補償傳遞函數參數設計為
4 仿真研究
傳統的經典PID控制在系統階躍響應方面具有較好的性能,但系統在作等速跟蹤及正弦跟蹤時穩態誤差較大。前饋控制是解決動態輸入信號時控制精度較好的措施,前饋控制通過引入輸入信號的一階或二階微分作為控制輸出的一部分,與反饋控制相結合可以得到較高的靜態精度和穩態跟蹤精度。這里速度環采用PI控制策略,位置環反饋控制采用純比例控制,前饋控制采用輸入信號的一階微分與二階微分的組合控制,從而組成基于PI速度環控制的交流位置伺服系統串級復合前饋控制。其仿真模型如圖5所示。
在MATLAB/Simulink中建立交流位置伺服系統仿真模型如圖6所示,進行控制器參數設計與計算機仿真。系統主要參數如下:系統電機及負載轉動慣量經折算后為 J=8.627×10-3kg·m2;系統不平衡力矩和摩擦力矩經折算后為4.86 N·m;系統外干擾力矩為10 N·m;電磁轉矩系數Kt=1.11 N·m/A;阻尼系數B=1.43×10-4N·m·s;定子電阻 Ra=2.6 Ω;繞組電感Ld=Lq=50 ×10-3H;額定電流Ie=6.4 A;允許最大電流Imax=12.8 A;磁極對數Pn=4。
考慮伺服系統機械減速比,當系統參考輸入為100 rad時響應曲線如圖7~12所示。其中:圖7和圖8在0.2 s負載突加10 N·m的干擾力矩,等速輸入為單位斜坡信號,正弦跟蹤等效正弦輸入信號為196 sin 0.713 6t。
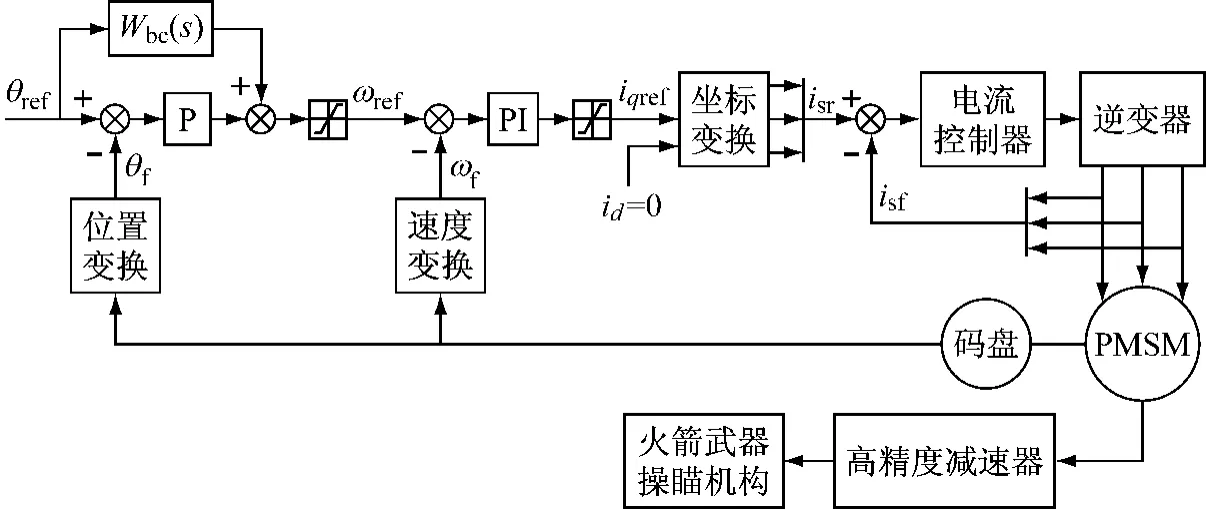
圖5 交流位置伺服系統串級復合前饋控制結構圖
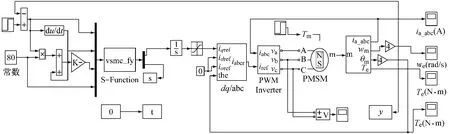
圖6 交流位置伺服系統復合前饋控制仿真模型
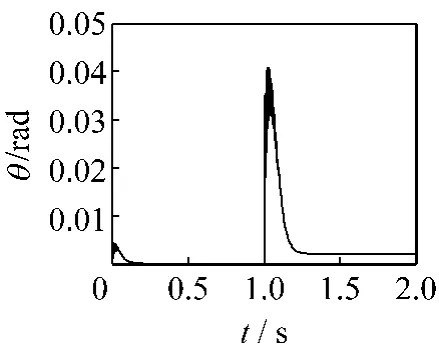
圖8 復合控制等速誤差
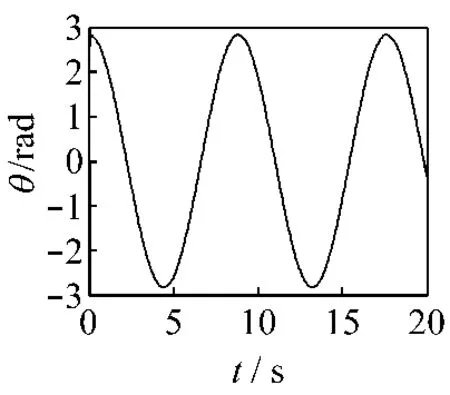
圖9 PID控制正弦誤差(J=J0)
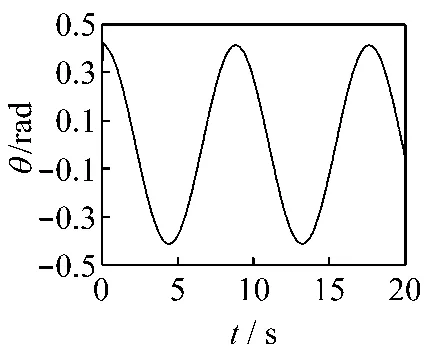
圖10 復合控制正弦誤差(J=J0)
如圖8~13所示,復合前饋控制策略對等速跟蹤具有較明顯的作用,表現在其穩態跟蹤誤差接近于零,對于正弦跟蹤,復合前饋控制策略仍然具有減小其穩態誤差的作用,但對慣量變化敏感,加大慣量,跟蹤初期表現為抖動峰值加大,進入穩態跟蹤時間加長。
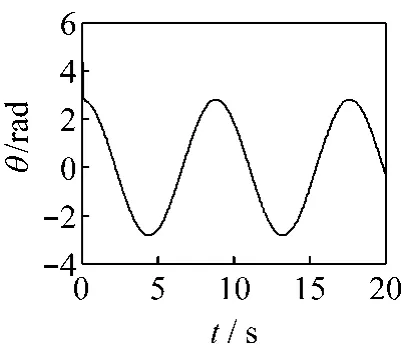
圖11 PID控制正弦誤差(J=2J0)
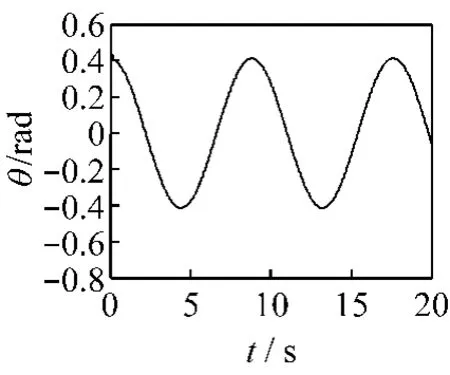
圖12 復合控制正弦誤差(J=2J0)
5 結 語
本文針對永磁交流位置伺服系統等速跟蹤與正弦跟蹤穩態精度低的缺點,提出了數字PMSM位置伺服系統復合控制結構方案,同時將PI控制與復合前饋控制應用于系統速度環和位置環設計,從而組成串級復合控制。計算機仿真結果表明,該控制策略對于等速輸入與正弦輸入信號可顯著降低其穩態輸出誤差,大大提高其跟蹤精度。
[1]秦憶.現代交流伺服系統[M].武漢:華中理工大學出版社,1995.
[2]史曉娟.虛擬軸機床滑模變結構位置控制的研究[D].西安:西安交通大學,2002.
[3]Kuo-Kai Shyu,Chiu-Keng Lai,Yao-Wen Tsai,et al.A newly robust controller design for the position control of permanent-magnet synchronous motor[J].IEEE Transactions on Industrial Electronic(S0278-0046),2002,49(3):558-565.
[4]段廣仁.線性系統理論[M].哈爾濱:哈爾濱工業大學出版社,1998.
[5]舒志兵.交流伺服運動控制系統[M].北京:清華大學出版社,2006.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
科教新報(2022年12期)2022-05-23 06:34:16
今日農業(2021年14期)2021-10-14 08:35:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
海峽姐妹(2020年8期)2020-08-25 09:30:18
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45