基于AVR單片機和L6208的步進電機控制系統設計
2011-06-02 09:54:08李文廣湯清華吳國安
電機與控制應用 2011年1期
李文廣, 湯清華, 吳國安
(華中科技大學電子科學與技術系,湖北武漢 430074)
0 引言
步進電機是數字控制電機,它將電脈沖信號轉變為角位移,在正常情況下,步進電機的轉速、停止的位置僅由脈沖信號的頻率和個數決定;同時,步進電機只有周期性的無累積誤差,精度和可靠性高,動態響應快,易于起停、正反轉及變速。由于這些優點,步進電動機已廣泛應用于速度控制、位置控制的系統中,如數控機床、計算機設備、自動記錄儀等。隨著應用的擴大,對步進電機的驅動控制要求也更高,如更小體積及更大的驅動能力等。
本文采用AVR單片機和ST公司的L6208電機驅動芯片作為電機驅動系統的設計方案,該系統的特點是集成度高、驅動電流大、精度及可靠性高、成本低,并具有很好的通用性,結合單片機串口通信可以實現遠程控制。
1 步進電機控制系統實現
本文的步進電機控制系統采用上位機、下位機結構。下位機負責進行指令譯碼,控制步進電機的轉動、停止和加、減速的實現。加速或減速過程采用軟件程序實現。上位機為PC機,負責將控制指令傳遞給下位機,并接收下位機的狀態信息,上位機和下位機通過串口交換數據。
步進電機驅動系統硬件框圖如圖1所示,采用AVR單片機和L6208來控制兩相的步進電機,通過單片機來控制L6208實現驅動電機工作。單片機通過串口接收上位機發出的運行指令,根據指令控制電機執行相應的運動,并將相應的狀態通過串口回傳給PC機。發光二極管用來檢測步進電機帶動的直線運動是否到達基準位置,一旦檢測到到達基準,高速比較器將光電轉換的信號送到AVR的外部中斷,單片機檢測到中斷后立即停止電機運行,該基準位置用來進行驅動部分的故障檢測,同時也能提高步進電機在直線位置控制中的精度。
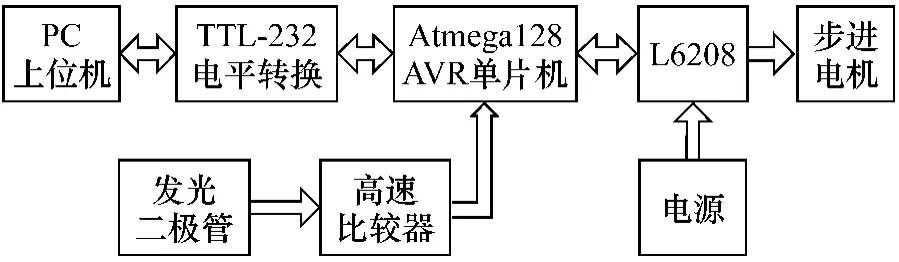
圖1 驅動系統硬件框圖
單片機采用Atmel公司生產的ATmega128,它是8位低功耗增強型內置Flash程序存儲器的精簡指令集結構單片機,與51單片機相比,AVR單片機具有很高的執行速度和非常豐富的片內資源。
L6208是ST公司推出的步進電機驅動芯片,集成了由8個功率DMOS晶體管組成的兩個全橋、一個執行相位生成功能的集中式邏輯電路和關斷時間恒定的脈寬調制(Pulse Width Modulation,PWM)電流控制器,該控制器內部采用斬波電路的原理,解決了步進電機頻繁換相時電流劇烈波動而引起轉矩變化的問題。
L6208的解碼邏輯電路能夠生成3個不同的步進序列,使該器件能夠適合各種應用。該芯片還具有熱關斷功能,其高壓側功率MOSFET具有無損耗的過流保護功能;而且工作電壓范圍廣(8~52 V),平均輸出電流可達 2.8 A,峰值5.6 A,可驅動絕大部分步進電機。即使將來因為某些特殊需要而選用其他型號的步進電機,也無需改變驅動電路,極大地方便了整個系統的后續改進優化。輸入脈沖頻率可達到100 kHz,因此可滿足各種轉速要求嚴格的場合,此電路和以往的驅動方案相比具有明顯的優點,驅動電流大、穩定性好、實現方便、安全可靠。
2 電路原理及方案實現
2.1 硬件電路
具體的電路如圖2所示,Us+、UCC通過外接電源來提供,其中Us+為驅動電源,電源值范圍為8~52 V,由于不同型號的步進電機工作電壓不一定相同,因此該電壓要與所使用電機的工作電壓保持一致。UREF為參考電壓,由UCC經過分壓電阻得到,其與SENSE腳上的電壓進行比較后控制全橋的關閉與否。MOTOR為驅動電路的輸出單元,OUT1A、OUT1B、OUT2A、OUT2B 與兩相步進電機相連。控制信號由ATmega128單片機提供,該系統采用單片機I/O中的PA4、PA5、PA6、PA7、PD5、PG1引腳配置為帶上拉電阻輸出并分別與驅動單元的 ENABLE、CW/CCW、CLOCK、CONTROL、RST、HALF/FULL 控制線相連。

圖2 步進電機驅動單元
2.2 軟件設計
ENABLE為L6208的使能信號,當輸入為低電平時,所有的MOSFET開關被關斷,高電平時使能工作。CW/CCW用來控制步進電機的轉向,高電平時,電機正轉;低電平時,電機反轉。CLOCK是相位序列發生器的時鐘,上升沿觸發有效,可以通過調整CLOCK脈沖的頻率來控制相位序列發生器產生的步進序列的頻率,以實現對步進電機速度的控制。RST信號用來復位相位序列發生器,當RST信號為低電平時,使相位序列發生器處于初始狀態。HALF/FULL用來設置步進序列的模式,配合RESET信號可以將L6208設置為半步模式、單相全步模式及兩相全步模式三種步進模式。CONTROL信號用來設置衰減模式,高電平時為慢速衰減模式,低電平時為快速衰減模式。
軟件流程圖如圖3所示,系統上電后,首先對程序進行初始化,包括讓電機運行到參考位置,設置串口通信模式以便接收上位機的控制命令,在收到串口信息幀后,單片機對數據幀進行判斷,得到相應的控制命令,控制步進電機執行相應的動作,在電機執行完畢后單片機將當前的狀態通過串口上報給PC機,然后返回繼續等待下條指令。

圖3 電機控制流程圖
步進電機在轉動時,隨著電機轉動速度的增大其力矩將會下降。在很多場合需要步進電機從低速慢慢加速升到高速轉動過程,然后勻速轉動,在接近停止時采用減速停止的過程以使電機的運行更加平滑和穩定。特別是在對響應時間有要求的工作場合中,要求加、減速流程時間盡量短,恒速時間盡量長。步進電機常用的加、減速曲線有:直線型曲線、S型曲線、指數型曲線。該系統要求在起動時有較高的力矩,勻速時盡可能快,減速確保平穩。因此,采用簡單的直線型加、減速曲線,L6208可以通過改變CLOCK脈沖的頻率來實現對電機轉速的改變,在軟件中可以很容易通過改變軟件延時來實現該CLOCK脈沖的頻率改變。電機直線加、減速控制流程如圖4所示。當步進脈沖數大于等于500時,電機先加速然后勻速再減速停止;當步進脈沖數大于等于250且小于500時,電機先加速起動然后又開始減速停止;當步進脈沖數小于250時,電機只做勻速步進。主要是在短程步進時能滿足時間要求,而在遠距離步進時希望能盡可能地縮短時間。
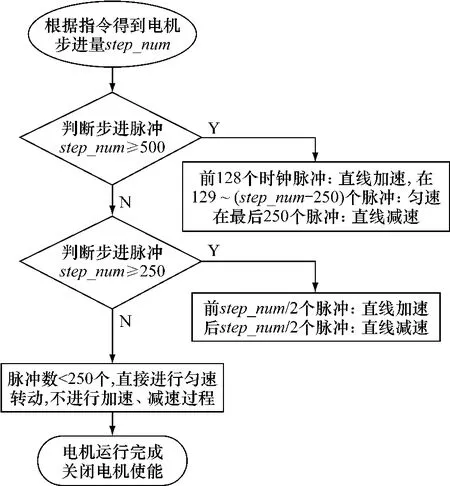
圖4 電機加、減速流程
2.3 應用實例
該步進電機控制系統已成功應用于電可調濾波器中。電可調濾波器是一種中心頻率可變的濾波器,濾波器的基本元件為電容和電感,控制濾波器內部的電容或者電感就能實現濾波器中心頻率的變化。平板電容的容值及面積的大小與距離長短有關,通過步進電機改變兩平板之間的距離能得到不同的電容值,進而可以實現濾波器中心頻率的改變。目前,采用該系統的電可調濾波器的中心頻率精確度可控制在50 kHz以內,并且具有很高的重復性。
3 結 語
該系統結合單片機和步進電機驅動芯片設計步進電機控制系統,該控制系統硬件電路設計簡單,結構緊湊、運行可靠;因使用專用驅動芯片,軟件編寫簡單;AVR單片機的JTAG接口使得程序調試和軟件更新更加方便。該系統能滿足42、56、82等系列的兩相步進電機的控制,實踐表明該控制系統效果好。該系統還可通過串口通信實現步進電機的遠程控制,或與其他反饋檢測環節連接,組成閉環控制系統用于精度和可靠性要求更高的控制系統中。
[1]馬潮.AVR單片機嵌入式系統原理與應用實踐[M].北京:北京航空航天大學出版社,2007.
[2]Atmel Corporation.Atmel data sheet(ATmega128 Rev.2467P-08/07)[G].2007.
[3]L6208 Datasheet.STMicroelectronics[G].2003.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45