鐵路有砟軌道自動養(yǎng)護測量系統(tǒng)研究思路探討
2011-06-07 09:24:38曾若飛
鐵道勘察 2011年2期
曾若飛
(中鐵工程設計咨詢集團有限公司,北京 100055)
1 概述
根據(jù)國家《中長期鐵路網(wǎng)規(guī)劃(2008年調整)》,2020年全國鐵路營業(yè)里程將達到12萬km以上,其中客運專線為1.6萬km,如此龐大的運營路網(wǎng),對鐵路的養(yǎng)護維修而言將是一個巨大的挑戰(zhàn)。依據(jù)規(guī)劃,有砟軌道將占據(jù)運營路網(wǎng)中的絕大部分,這其中不僅包括新建時速200 km以上的有砟客運專線,也包括通過鐵路六次大提速而使運營速度達到200 km/h的部分既有線路。有砟軌道經(jīng)過一段時間的運營后,其軌道幾何形位將不可避免的偏移線路設計位置,不僅影響行車速度,造成乘車旅客的不舒適感,而且還會加劇鋼軌的磨耗,使道床及路基承受不良狀態(tài)的受力,對道床及路基結構造成破壞,導致鐵路運營維護成本的上升,嚴重情況下還會危及行車安全。因此,必然要使用大型搗固設備對有砟軌道幾何形位進行整正,使其滿足運行需要。
使用搗固車對有砟軌道進行線路維護,將軌道撥道至正確位置,其前提條件是為搗固車的搗固控制系統(tǒng)提供正確的撥道量與起落量,而撥道量及起落量的獲取則是通過線路測量的方法得到。我國傳統(tǒng)的作業(yè)方法是通過既有線復測系統(tǒng)獲取線路的幾何形位狀態(tài),進而指導線路養(yǎng)護作業(yè)。既有線復測系統(tǒng)主要包括里程丈量、軌道抄平、導線測量及曲線計算等流程,同時引入了平面位置基準與高程位置基準,能夠較為全面地反映軌道的幾何狀態(tài)。然而,該系統(tǒng)是基于落后的技術水平與測量手段建立起來,未能反映當前日新月異的測量新技術及裝備水平,其主要特點是采用大量人工進行作業(yè),效率低下且精度不高。隨著我國鐵路建設的大發(fā)展及路網(wǎng)規(guī)模的不斷擴大,運營階段的線路養(yǎng)護問題日益突出,落后的線路養(yǎng)護技術手段越來越不能適應現(xiàn)代化鐵路養(yǎng)護的需求,因此,為了從根本上緩解龐大的線路養(yǎng)護作業(yè)需求與現(xiàn)有線路測量系統(tǒng)低精度、低效率間的矛盾,開展與搗固車配套作業(yè)的“有砟軌道自動養(yǎng)護測量系統(tǒng)”研究就顯得尤為重要。
2 “有砟軌道自動養(yǎng)護測量系統(tǒng)”概念
作為與搗固車配合作業(yè)并為搗固車提供有砟軌道線路整正數(shù)據(jù),能夠滿足現(xiàn)代鐵路運營養(yǎng)護高效率、高精度作業(yè)需求的線路測量系統(tǒng),“有砟軌道自動養(yǎng)護測量系統(tǒng)”集成了當前眾多的測量新技術,進一步發(fā)展完善了軌道線形測量的數(shù)據(jù)處理理論,具有如下幾個顯著的特點:
(1)引入了絕對位置測量基準,包括平面位置基準及高程位置基準,也即通過該系統(tǒng)不僅能快速高效地獲取軌道的軌距、超高等內部幾何數(shù)據(jù),還能獲取左、右鋼軌的平面位置及高程等外部幾何數(shù)據(jù),通過這些內外部數(shù)據(jù)來描述軌道完整的幾何狀態(tài)。
(2)與絕對位置測量功能相匹配,還需要有一個遍布全線的位置控制基準,這個控制基準為空間定位與測量提供了必要的位置信息。例如CPⅢ控制網(wǎng)就是基于空間三維坐標建立起來的這樣一種位置控制基準。
(3)具有一個為線路運營管理提供技術支持服務的線路基礎數(shù)據(jù)庫,該數(shù)據(jù)庫記錄了所管理軌道的正確的幾何狀態(tài),則在獲得軌道實際幾何狀態(tài)數(shù)據(jù)后,將之與線路基礎數(shù)據(jù)庫中的數(shù)據(jù)進行比對分析,以獲取線路搗固使用的起道量與撥道量。
(4)線路測量的最終目的是為搗固作業(yè)提供起撥道數(shù)據(jù),且在滿足行車要求的前提下,搗固作業(yè)量應該盡可能小。因此,僅僅通過與線路基礎數(shù)據(jù)庫進行比對來獲取起撥道量是不夠的,還應具有更加完善的軌道幾何狀態(tài)數(shù)據(jù)處理方法,以獲得最優(yōu)化的線路起撥道量。
綜上所述,位置控制基準與線路基礎數(shù)據(jù)庫是“有砟軌道自動養(yǎng)護測量系統(tǒng)”能夠進行正常測量作業(yè)的前提條件,需要提前實施;完善的數(shù)據(jù)處理則在獲取數(shù)據(jù)之后進行,如何快速、高效、可靠地獲取軌道的內外部幾何數(shù)據(jù),是“有砟軌道自動養(yǎng)護測量系統(tǒng)”的難點所在。
3 “有砟軌道自動養(yǎng)護測量系統(tǒng)”的需求與必要性
前已述及,既有線復測系統(tǒng)不能滿足日益擴大的線路運營養(yǎng)護需要。為獲取線路的起撥道量,還存在一種安裝在搗固車上的弦測量系統(tǒng)。顧名思義,弦測量系統(tǒng)即是采用拉弦測量的方法,測量軌道的矢距并進而評判軌道的軌向平順性與高低平順性[1],然后搗固作業(yè)。由于該測量系統(tǒng)直接安裝在搗固車上,因而實現(xiàn)了邊測量邊搗固的作業(yè)模式,有效提高了工作效率。然而,該方法的弦線長度通常只有10 m,也即只能測量軌道的短波平順性,對長波平順性測量無能為力。換句話說,采用弦測量系統(tǒng)搗固出來的軌道實際上是由無數(shù)的小碎波組合而成,圓曲線地段也不再遵從統(tǒng)一的曲線半徑,從宏觀上看軌道線形極為不利。
弦測量系統(tǒng)在本質上為一相對測量系統(tǒng),其作業(yè)模式及效果如圖1所示。

圖1 相對測量系統(tǒng)作業(yè)示意
雖然搗固作業(yè)后的軌道在短波范圍內比搗固前更加平順,然而仍然偏離理論軌道較遠,且長波不平順沒有得到實質性改善。研究表明,列車在較低速度運行時,其振動主要由軌道短波平順性缺陷引起,此種缺陷可以采用弦線測量技術進行一定程度的修復;但在高速運行時,軌道長波不平順成為影響列車運行安全和旅客乘坐舒適度的主要因素之一。很顯然,弦線測量系統(tǒng)滿足不了現(xiàn)代列車行車對軌道平順性的要求。
因此,發(fā)展具有絕對測量功能的“有砟軌道自動養(yǎng)護測量系統(tǒng)”,使之不僅能夠處理短波不平順,同時還能夠處理長波不平順,并且可以與現(xiàn)代鐵路養(yǎng)護的高精度、高效率相匹配,就顯得尤為必要。
4 “有砟軌道自動養(yǎng)護測量系統(tǒng)”的主要技術思路
“有砟軌道自動養(yǎng)護測量系統(tǒng)”在國外已有一些成熟的技術產(chǎn)品,但與中國的國情不相適應:一是產(chǎn)品價格昂貴,如2 000萬人民幣至4 000萬人民幣一套;二是運營維護成本高,體積龐大,燃油驅動;三是國外沒有在時速250 km的有砟鐵路上成功應用過,測量精度證據(jù)不足;四是國外測量系統(tǒng)與中國鐵路傳統(tǒng)的工務基礎測量(含數(shù)據(jù)庫)觀念及方法不完全兼容。鑒于此,我們認為應該結合中國鐵路的具體情況,研究適合中國國情的技術產(chǎn)品系統(tǒng)。該系統(tǒng)的研究難點在于如何快速高效、成本合理且高精度地測量軌道的內外部幾何數(shù)據(jù),根據(jù)現(xiàn)有的測量技術水平,存在如下幾種技術方案。
4.1 基于陀螺慣導及光電跟蹤技術的測量方案
該方案僅采用一輛可在軌道上行走且具有動力的測量車,其上搭載了六個子系統(tǒng),分別是陀螺慣導系統(tǒng)、光電跟蹤系統(tǒng)、軌距測量系統(tǒng)、里程測量系統(tǒng)、數(shù)據(jù)采集與通信單元、數(shù)據(jù)處理系統(tǒng),并基于沿線布置的控制基準進行線路測量作業(yè),其作業(yè)模式如圖2所示。首先給測量車一個起始位置,則測量車的走行距離可以通過里程測量系統(tǒng)得到,同時由光電跟蹤系統(tǒng)跟蹤測量車前方的絕對控制基準點并返回測量車與基準點間的相對位置關系,由陀螺慣導系統(tǒng)提供測量車在每一時刻的三維姿態(tài)信息,由軌距測量系統(tǒng)實時測量線路的軌距,最后由數(shù)據(jù)采集系統(tǒng)將所有的數(shù)據(jù)匯總起來,由數(shù)據(jù)處理系統(tǒng)解算出軌道在每一測量位置的幾何狀態(tài),包括軌距、超高、平面位置及高程等。該系統(tǒng)的優(yōu)點在于只有一輛測量車,簡潔方便;光電跟蹤目標可以設置為永久裝置,且陀螺慣導及光電跟蹤的實時性也較好,則整個系統(tǒng)測量作業(yè)的自動化程度較高,能夠滿足現(xiàn)代鐵路自動化養(yǎng)護作業(yè)的需要,瑞士瑪?shù)偕镜腜ALAS系統(tǒng)是應用該技術的成功先例。
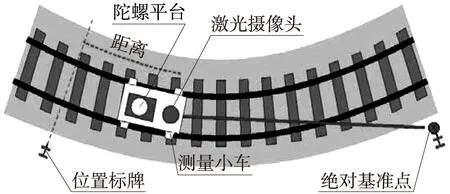
圖2 基于陀螺慣導及光電跟蹤技術的測量系統(tǒng)作業(yè)示意
4.2 基于智能型全站儀自動跟蹤測量技術的測量方案
具有自動目標識別功能(ATR)及跟蹤測量功能的智能型全站儀(測量機器人)一經(jīng)推出,即在測繪工程界得到極為廣泛的應用,本方案即利用測量機器人來實現(xiàn)線路的自動養(yǎng)護測量。系統(tǒng)由測量車A及測量車B兩部分組成,A車搭載測量機器人,B車搭載軌距測量單元、超高測量單元、數(shù)據(jù)采集及處理單元等。作業(yè)時,首先由A車上的測量機器人后視線路兩邊的CPⅢ控制點進行自由設站[2],然后在對B車上的棱鏡進行動態(tài)跟蹤測量;B車則以一定的速度由遠及近地向A車行進,同時由數(shù)據(jù)采集單元不斷地采集軌距、超高等信息,最后結合棱鏡三維坐標即可解算出軌道的內外部幾何狀態(tài)結果,其作業(yè)示意圖如圖3所示。
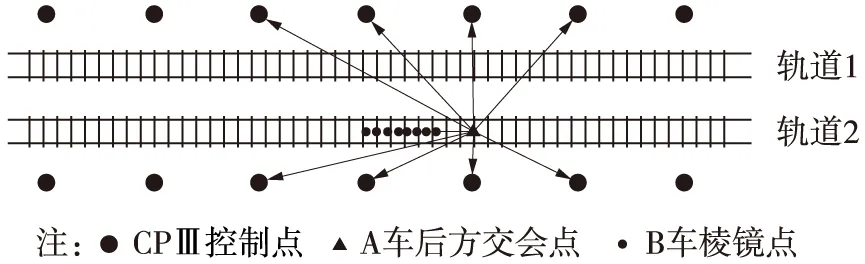
圖3 基于測量機器人跟蹤測量技術的測量系統(tǒng)作業(yè)示意
在實現(xiàn)動態(tài)高效測量的同時,測量精度決定了系統(tǒng)的成敗。應用本方案進行的精度測試表明,在100 m左右的設站距離下,動態(tài)跟蹤測量的精度能夠得到保障,數(shù)據(jù)分析情況如圖4所示。
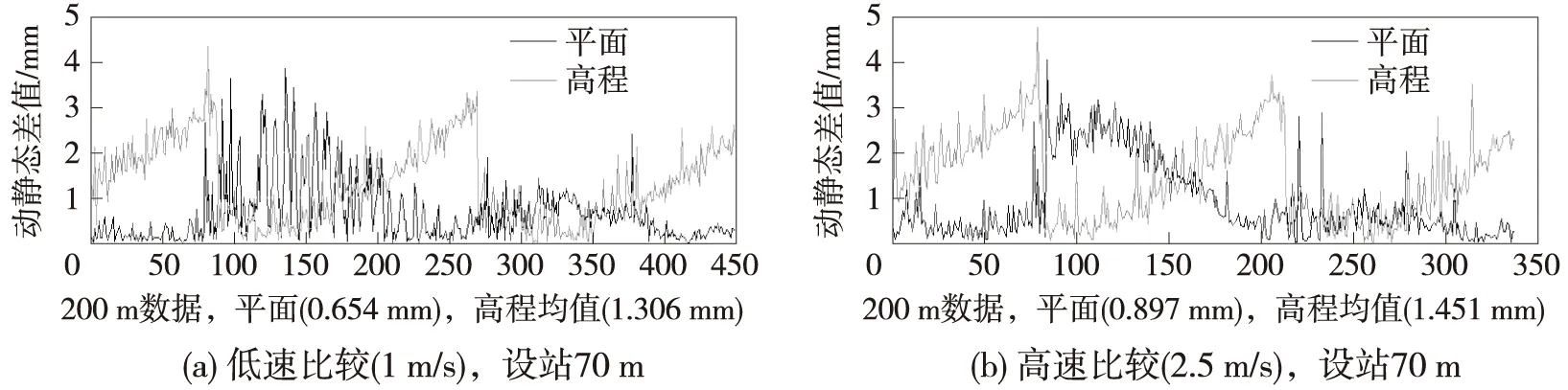
圖4 測量機器人動態(tài)跟蹤測量的精度測試情況
對圖4的分析表明:在70 m設站距離下,分別以1 m/s及2.5 m/s的速度得到的動態(tài)跟蹤測量結果與靜態(tài)測量結果的比較,平面位置差值的均值不足1 mm,高程差值的均值小于1.5 mm,吻合較好。此外,為了提高系統(tǒng)的作業(yè)效率,對全站儀自由設站過程還可進行如下改進:
①采用三個CPⅢ控制點進行自由設站,且對設站精度進行適當放寬。
②由于CPⅢ控制網(wǎng)是精度均勻且相對精度良好的三維控制網(wǎng),故可采用全站儀無整平設站技術進行自由設站,進而可節(jié)約大量的時間。
該系統(tǒng)的優(yōu)點在于技術實現(xiàn)難度較小,測量機器人也提供有編程應用程序接口,易于實現(xiàn)編程自動控制,且可直接利用許多線路已經(jīng)建成的CPⅢ控制網(wǎng);缺點在于系統(tǒng)由兩輛測量車組成,不夠簡便,且在作業(yè)過程中需要不斷地進行CPⅢ棱鏡的安裝與拆卸工作。然而從總體來看,該技術方案仍然具有較大的研究價值。
4.3 基于近景攝影測量技術的測量方案
近景攝影測量技術近來得到飛速發(fā)展,不僅攝影器材得到長足進步,而且在圖像處理、特征提取、目標判別等數(shù)據(jù)處理方法上也有巨大進展。該方案的原理如下:以沿軌道兩側的CPⅢ點作為像控點,聯(lián)合軌道點與控制點[3],采用基于正反向三攝站交向攝影法為技術手段(圖5),運用自檢校光束法區(qū)域網(wǎng)平差理論,解算控制點的攝影測量坐標與軌道檢測點坐標,然后根據(jù)軌道測點坐標計算軌道平順度參數(shù),進而得到軌道的起撥道量。
系統(tǒng)由一輛具有動力的測量車組成,搭載攝影儀器及數(shù)據(jù)采集單元。作業(yè)時,測量車在軌道上行駛,攝影儀器則不斷地對軌道進行拍照并將數(shù)據(jù)保存下來,由此可實現(xiàn)軌道的實時動態(tài)測量。采用合適的攝影方案及像控策略,可以有效地保證測量精度;而數(shù)字圖像處理技術則可自動實現(xiàn)同名影像匹配,極大的提高了數(shù)據(jù)處理效率。試驗表明,采用近景攝影測量的方法獲取的軌道幾何狀態(tài)數(shù)據(jù)能夠達到毫米級精度。該技術方案的優(yōu)點在于系統(tǒng)結構簡潔,能夠實現(xiàn)很高的動態(tài)測量效率;不足之處在于圖像數(shù)據(jù)量異常龐大,不能進行數(shù)據(jù)的實時處理,且在特征提取方面仍然存在算法上的不足。

圖5 某客運專線正反向三攝站交向攝影試驗
4.4 基于激光弦測量技術的測量方案
將激光弦測量技術用于軌道線路測量早已有之,國內也有也有與搗固車配合作業(yè)的相關報導。然而國內目前的研究現(xiàn)狀是根據(jù)激光準直原理對線路進行測量,僅能應用于直線地段,曲線地段還不能應用,而且未引入平面位置基準與高程位置基準,因此與弦線測量系統(tǒng)非常類似,僅僅是把每次測量的弦長增加了,從根本上講仍是一個相對測量系統(tǒng),不能滿足長波平順性測量的要求。
奧地利普拉塞公司的EM-SAT測量系統(tǒng)是基于激光弦測量且能夠用于曲線地段測量的一個案例。EM-SAT系統(tǒng)由測量車(EM)及衛(wèi)星前導車(SAT)構成,測量車搭載數(shù)據(jù)處理系統(tǒng)及各種控制和接收裝置,用于激光弦測量、里程測量、軌距測量等;衛(wèi)星前導車搭載激光發(fā)射源并根據(jù)固定樁系統(tǒng)進行絕對定位,作業(yè)時由測量車向衛(wèi)星前導車行進,從而實現(xiàn)軌道幾何狀態(tài)的連續(xù)測量。該系統(tǒng)的運作有賴于一個事先建立的固定樁系統(tǒng),這個固定樁系統(tǒng)采用里程加支距的方法建立,有別于使用空間三維坐標建立的控制基準(如圖6所示)。
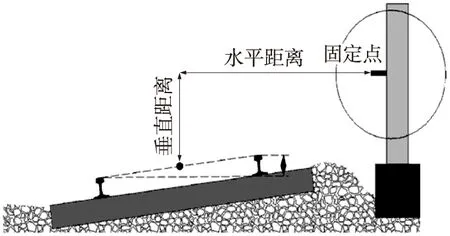
圖6 EM-SAT固定樁系統(tǒng)示意
固定樁安裝在線路旁邊的接觸網(wǎng)桿上,然后測量該固定樁在垂直于線路方向上與線路中心點的垂直距離及水平距離,并且記錄該固定樁的所在里程,由此建立起控制基準。基于該控制基準,還建立有一個關于軌道幾何狀態(tài)的中央數(shù)據(jù)庫,EM-SAT系統(tǒng)作業(yè)的前提,既是固定樁系統(tǒng)及其中央數(shù)據(jù)庫。
如上所述,實現(xiàn)本方案所需建立的固定樁系統(tǒng)及其中央數(shù)據(jù)庫中數(shù)據(jù)的表達方式,均與我國基于空間三維坐標建立的控制基準及數(shù)據(jù)表達方式相差甚遠,采用本方案則意味著我國鐵路已經(jīng)建立的控制基準及相關成果均不能使用,破壞現(xiàn)有技術體系的延續(xù)性,并且成本異常巨大。
4.5 基于全球定位系統(tǒng)的測量方案
全球定位系統(tǒng)(GPS)能夠對信號所及的空間任意點進行實時定位,且動態(tài)特性良好,能夠滿足“有砟軌道自動養(yǎng)護測量系統(tǒng)”對動態(tài)特性的要求。該方案采用一輛測量車,搭載GPS接收機、軌距測量系統(tǒng)、超高測量系統(tǒng)及數(shù)據(jù)處理系統(tǒng),利用GPS的絕對定位功能[4],再結合軌距、超高等信息,可以解算出軌道的內外部幾何狀態(tài)。該方案的不足之處在于不論采用何種技術手段,GPS實時動態(tài)定位精度均達不到毫米級,離“有砟軌道自動養(yǎng)護測量系統(tǒng)”的測量精度尚有一定距離。
5 結束語
我國鐵路規(guī)模的不斷擴張對運營養(yǎng)護的效率提出了極高的要求,繁忙干線鐵路的人工養(yǎng)護越來越不適應現(xiàn)實的需要,發(fā)展高質量、高效率養(yǎng)護技術已經(jīng)成為我國鐵路實現(xiàn)自動化養(yǎng)護的必然;而清除軌道長波缺陷的需要,也促使了軌道測量由相對測量向絕對測量的方式轉變。基于我國鐵路運營養(yǎng)護的現(xiàn)狀及未來的現(xiàn)實需要,本文提出了“有砟軌道自動養(yǎng)護測量系統(tǒng)”這一概念,掃描了國內外軌道測量的現(xiàn)狀,并對當前能夠實現(xiàn)這一系統(tǒng)的各種技術方案進行了簡要的評述。
[1]鐵建設[2009]196號 高速鐵路工程測量規(guī)范[S]
[2]張忠良,楊友濤,劉成龍.軌道精調中后方交會點三維嚴密平差方法研究[J].鐵道工程學報,2008(5):33-36
[3]龔 濤.近景攝影測量控制點布設方案的研究[J].西南交通大學學報,1997,32(3):330-335
[4]李征航,張小紅.衛(wèi)星導航定位新技術及高精度數(shù)據(jù)處理方法[M].武漢:武漢大學出版社,2009,10
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21