鄭州軌道交通2號線GPS控制網建立及其精度分析
2011-06-07 09:37:10狄鋼
鐵道勘察 2011年2期
關鍵詞:質量
狄 鋼
(鄭州市規劃勘測設計研究院,河南鄭州 450052)
1 工程概況
軌道交通作為現代城市公共交通體系的骨干,對于解決日漸擁堵的地上交通問題具有不可替代的作用,同時作為一項投資巨大的基礎交通工程,它的開工建設,將大大促進城市的經濟和社會發展。鄭州軌道交通2號線呈南北走向,全長26.7 km,共設車站21座,平均站間距1.3 km。線路經過鄭州市城區目前南北最長的交通大動脈花園路和紫荊山路,連接至管城區南部,沿線分別與其他規劃的5條軌道線路相交,全線1/3位于主城區,道路兩邊高樓林立,電力線、無線電發射塔和樓頂中轉基站較多,城市無線電干擾嚴重,給GPS測量帶來很大困難。
2 GPS控制網技術設計
2.1 布網原則
根據《城市軌道交通工程測量規范》(GB50308—2008)規定,其主要技術指標符合表1的規定。
本項目GPS控制網根據《城市軌道交通工程測量規范》、《城市測量規范》、《全球定位系統(GPS)測量規范》中相關技術要求布網。GPS控制網沿軌道線路,采用邊連接的形式布設,有多個同步大地四邊形或三角網構成,網內重合了3個城市首級GPS點,由異步環構成閉合環,閉合環的邊數不大于6條,并在1號線的重合處布設的2個重合點,作為檢核。

表1 衛星定位控制網主要技術指標
2.2 選點埋石
GPS控制網的布設主要是為軌道交通施工和管理提供高精度的平面基準,其點位布設主要考慮下列要求:(1)便于下一步精密導線的布設測量。(2)點位分布合理。主要指在軌道交通線路每個車站、停車場和車輛段附近均布設GPS點,線路兩邊其他點位主要為加強GPS控制網圖形強度。(3)考慮到地鐵施工時對橫向貫通誤差的高精度要求,沿線路兩側布設的GPS點盡量保證相鄰兩點通視。(4)點位穩固,易于保存。(5)點位滿足GPS觀測對環境的需要。
根據以上要求,軌道2號線共選點36個,均按線路走向布設,絕大部分控制點選在建筑物的樓頂。
2.3 外業觀測
GPS平面控制網外業靜態觀測采用4臺Trimble 5700雙頻接收機作業。所有5700 GPS接收機均于測前進行了檢測,其精度優于標稱指標。根據編制的GPS衛星可見性預報表及衛星的幾何圖形強度,選擇最佳觀測時段。
觀測時按靜態定位模式進行觀測,每條邊觀測時段數≥2,每個觀測時段長度≥90 min,衛星截止高度角≥15°,天線整平對中誤差不大于3 mm。每個觀測時段前后各量取天線高一次,兩次量測值互差≤3 mm,取平均值作為最后天線高。
全網共聯測了包括3個已知點在內的36個GPS控制點。觀測時除對GPS控制網內相鄰短邊保證同步觀測外,還選擇了多個GPS點構成長邊圖形觀測,保證了GPS網的精度均勻。鄭州市軌道交通2號線GPS控制網聯測網如圖1所示。
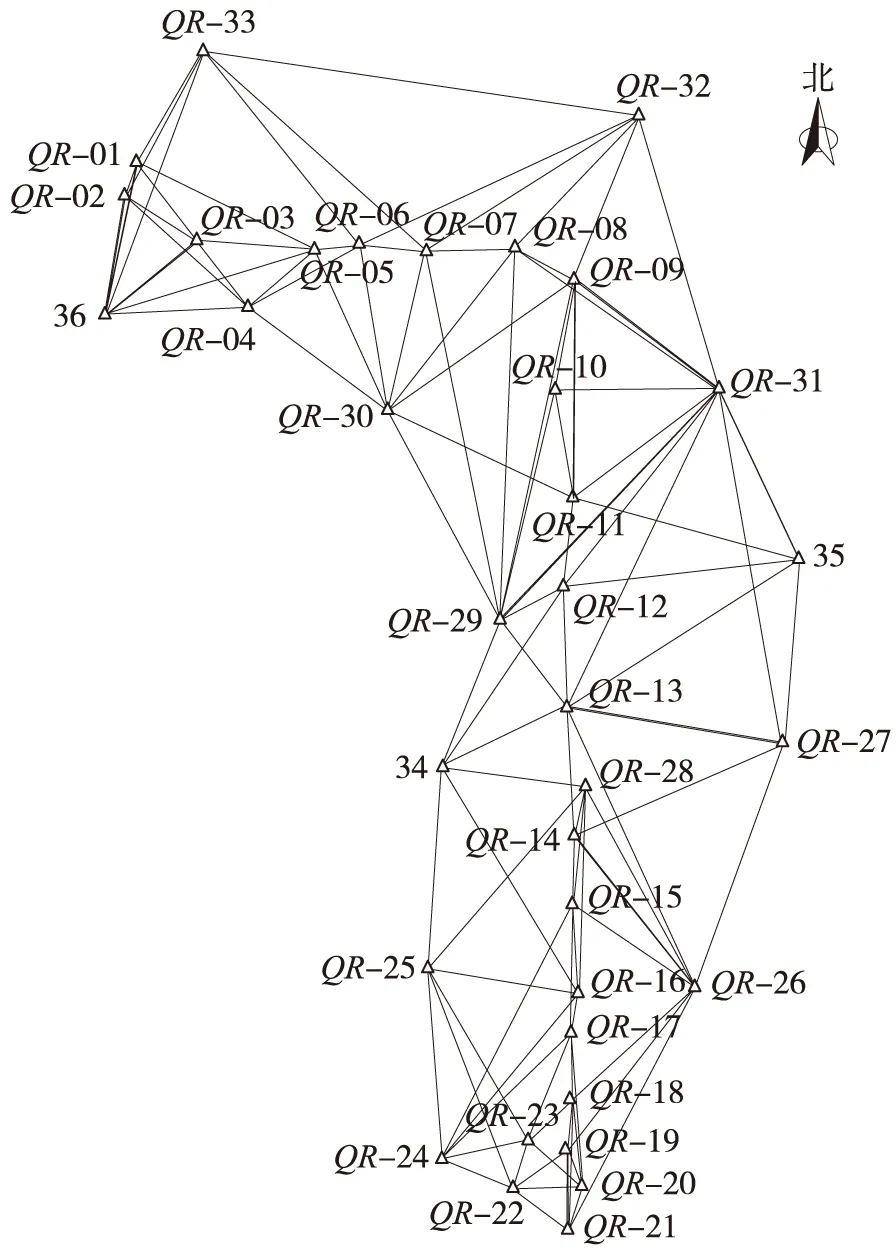
圖1 GPS控制網觀測略圖
2.4 基線解算及其質量檢核
(1)基線解算
基線解算是利用多臺接收機進行同步觀測,采集同步觀測數據,計算出同步觀測站之間的相對位置(坐標差/基線向量)的過程。本工程采用Trimble隨機軟件TGO1.63按靜態相對定位模式解算,基線解算采用衛星廣播星歷作為基線解的起算數據。因測區處于主城區,無線電信號強烈,在加上太陽等天體輻射的影響,GPS信號通過電離層時,傳播路徑和傳播速度會發生變化,從而影響GPS衛星至地面接收機的距離,如不加以仔細改正,會嚴重影響GPS觀測精度。本項目使用多臺接收機進行同步觀測,并在基線解算時通過高級參數設置,利用TGO電離層改正模型,對超過5 km的基線進行電離層改正。處理結果表明,一般情況下雙頻接收機對較長基線加改正,均會對基線質量有所改善;在確保觀測時段的條件下,適當提高衛星觀測截止角,可以減小噪聲對GPS信號的影響,也是提高基線質量的有效途徑之一。由于Zephyr Geodetic天線半徑較大,采用微相位中心技術,利用特殊的合金涂層來大幅度降低多路徑效應對觀測的影響,因此,在有些復雜場合,可以使用Zephyr Geodetic天線來提高觀測質量。此次控制網觀測時,采用2個Zephyr Geodetic天線和2個Zephyr天線。
(2)基線向量質量檢核及精度分析
基線向量質量檢核是為了給后繼數據處理分析提供高質量的基線向量結果。對基線向量可根據以下幾個方面進行質量檢核。
①對于單基線來說,采用Ratio值、參考方差、RMS和數據剔除率四項指標來檢查基線質量。
比率Ratio反映所確定的整周未知數參數的可靠性,該值越大可靠性越高,主要與觀測時衛星星座的數量和幾何圖形有關;參考方差即單位權方差;RMS是觀測值殘差的均方根,RMS值越小越好。數據剔除率越高說明觀測值質量越差,軌道交通2號線GPS網的單基線指標統計如表2所示。

表2 單基線質量技術指標統計
②對于多基線來說,檢測標準有三項:同步環閉合差、異步環閉合差和重復基線較差。
同步環閉合差:從理論上講同步觀測基線間有一定的內在聯系,閉合差應該為0,但實際中有誤差的存在往往不可能為0。當同步環閉合差超限時,說明閉合環中至少有一條基線有問題,但當同步環閉合差不超限時也不能說明閉合環中所有基線質量均合格。
異步環閉合差:是一個絕對質量指標。當異步環閉合差滿足規范要求時,則說明組成異步環的所有基線解算質量均合格。軌道交通2號線GPS控制網基線向量異步環閉合差統計表如表3所示。
重復基線較差:是指不同觀測時段對同一基線重復觀測的觀測值間的差異。當其滿足規范限差要求時說明基線向量解算合格,當不滿足時則說明至少有一個時段觀測的基線有問題,可以通過多條復測基線來判斷哪個時段的基線觀測值有問題。軌道交通2號線GPS控制網基線向量異步環閉合差統計表如表4所示。
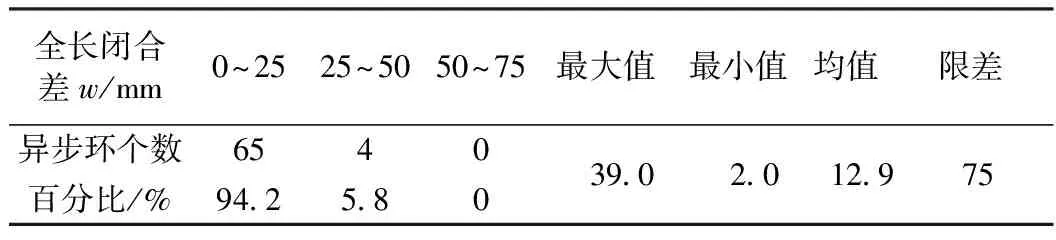
表3 控制網異步環質量統計
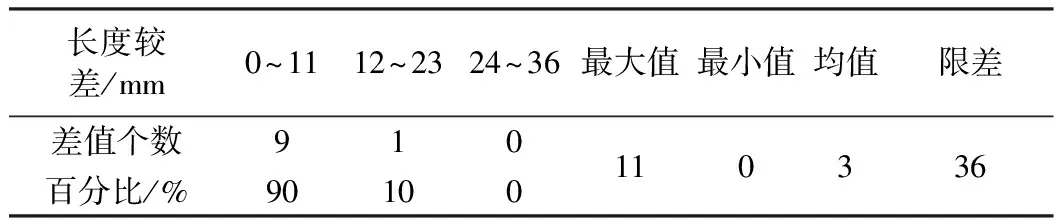
表4 控制網復測基線質量統計
3 GPS控制網平差及精度分析
GPS控制網平差包括三維無約束平差和二維約束平差,平差數據采用基線向量的雙差固定解進行。網平差采用武漢大學研制的“科傻GPS數據處理系統”軟件,以控制網內一點的WGS-84坐標為起算數據,在WGS-84坐標系內進行三維無約束平差,以檢定基線向量網自身的內符合精度及其系統誤差和粗差。經三維無約束平差計算,基線向量網最弱邊相對中誤差為1/76萬,最弱點點位中誤差為1.87 cm,經統計所有基向向量改正數的絕對值均滿足規范中限差的要求。三維無約束平差通過后,再以鄭州城市控制點平面直角坐標對基線向量網進行約束平差,將GPS網的WGS-84坐標轉換為鄭州市城市坐標,即得到GPS控制網中各點最終的坐標成果。
二維約束平差前先要進行已知點的檢驗,本次2號線GPS網中所用到的3個已知點的兼容性已經在1號線首級GPS控制網測量中得到了確認,它們的正確性毋庸置疑。通過二維約束平差,2號線GPS控制網最弱邊相對中誤差1/62萬,最大方向中誤差0.3",最弱點點位中誤差0.33 cm。通過以上數據分析,全網33個新設點,點位中誤差均小于限差±12 mm精度要求,點位精度如圖2所示,同時也滿足最弱邊1/10萬的精度要求。
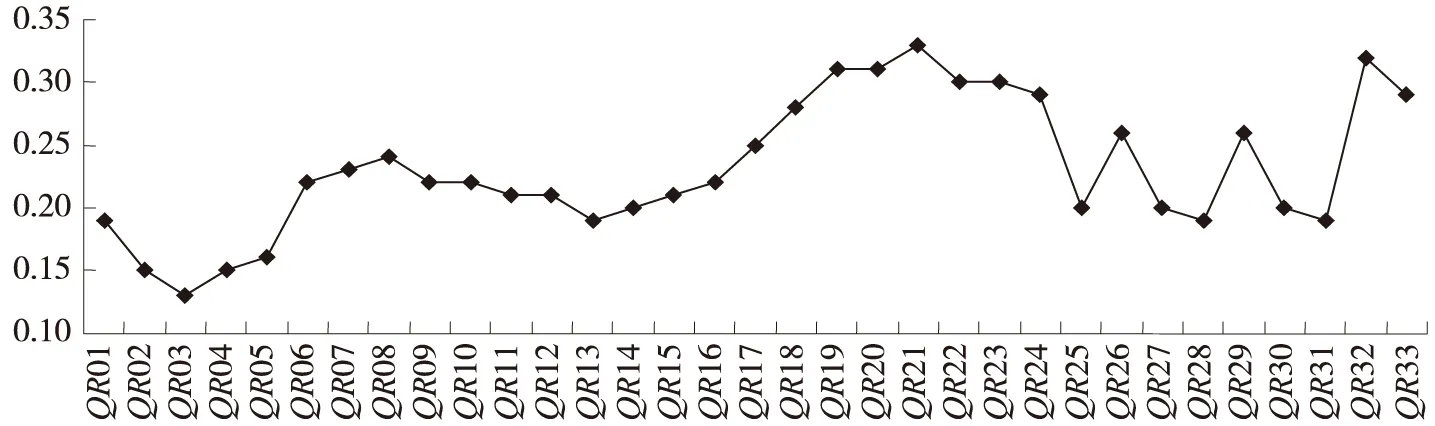
圖2 鄭州市軌道交通2號線GPS控制網約束平差精度
4 GPS控制網檢核測量
為了檢核本控制網的可靠性,對該控制網進行了外業檢測,采用TCR1201全站儀,其測角標稱精度精度1.0"、測距標稱精度±(1+1.5×10-6D)mm,共檢測了6條邊長,經計算改化到控制網二維平差所在的BJ-54橢球的高斯投影面上,檢測結果如表5所示。
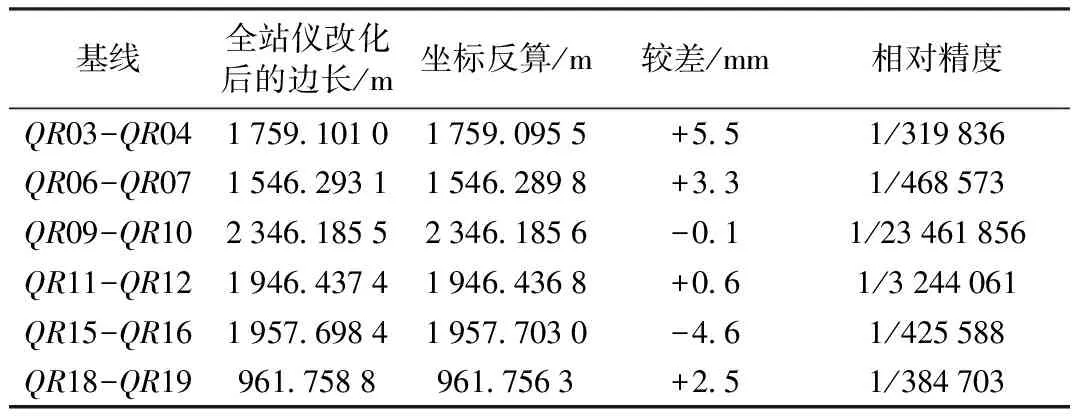
表5 基線檢測精度統計
從表5比較結果可以看出,GPS觀測精度良好,符合規范要求,能夠滿足施工的需要。
5 結束語
從最終平差結果看出,軌道交通2號線GPS平面控制網的精度完全滿足設計要求,采用GPS測量方法獲取高精度成果是傳統方法無法比擬的。城市軌道交通建設一般位于城市的繁華地段,建筑物密集,高樓林立。GPS控制網建設時,既要考慮GPS信號接收的要求,又要考慮地面精密導線點的布設和通視,所以在嚴格執行設計要求的同時,必須考慮以下幾點問題:
(1)軌道交通GPS控制網宜采用邊連接方式構網,由多個同步大地四邊形構成,并對包括已知點在內的控制網進行長邊大地四邊形測量,以便對整網進行長度基準控制。
(2)在GPS網布測時,短邊必須同步觀測,以獲取獨立基線。
(3)GPS基線向量的解算很重要。要加強基線解算的質量控制檢核,嚴格用同步環閉合差、異步環閉合差和重復基線較差,來判定基線解算質量。
(4)影響基線向量解算質量的因素很多,但最基本的是觀測條件,即觀測點的位置和觀測時段。因此點位的選擇非常重要,選點時要盡量遠離高大的建筑物、大面積水域,遠離高壓輸電線路和無線電發射裝置,觀測時段主要根據衛星星歷圖和衛星星座相對測區的幾何分布,選擇最佳時間觀測。
(5)對于高精度的GPS控制網,重復基線觀測非常重要,控制網中骨干網點應重復觀測,重復觀測次數≥2,通過多條重復觀測基線可直接判定基線解算質量和整個基線向量網的好壞。
(6)在二維約束平差前應進行已知點的可靠性檢驗,對參與平差的已知點進行分析和篩選,選擇正確且精度高的已知點進行二維約束平差。
[1]魏二虎,黃勁松.GPS測量操作與數據處理[M].武漢:武漢大學出版社,2004
[2]GB50308—2008 城市軌道交通工程測量規范[S]
[3]黃北新,付先國,王 林,等.合肥軌道交通1號線GPS控制網建立[J].城市勘測,2010(4)
猜你喜歡
中學生數理化·中考版(2022年10期)2022-11-10 09:37:42
中學生數理化·八年級物理人教版(2022年12期)2022-02-14 07:08:42
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
石油化工建設(2018年6期)2018-04-22 03:16:54
產品可靠性報告(2017年7期)2017-09-05 09:49:12
中學生數理化·八年級物理人教版(2017年12期)2017-04-18 12:59:38
汽車觀察(2016年3期)2016-02-28 13:16:26
民生周刊(2014年7期)2014-03-28 01:30:54