潛艇水下運(yùn)動(dòng)穩(wěn)定性非線性分析研究
2011-06-07 07:52:48戴余良王長湖劉祖源
船舶力學(xué) 2011年8期
戴余良,王長湖,苗 海,劉祖源
(1海軍工程大學(xué) 船舶與動(dòng)力學(xué)院,武漢 430033;2青島92196部隊(duì)裝備部,山東 青島 266011;3武漢理工大學(xué) 交通學(xué)院,武漢 430063)
潛艇水下運(yùn)動(dòng)穩(wěn)定性非線性分析研究
戴余良1,王長湖2,苗 海1,劉祖源3
(1海軍工程大學(xué) 船舶與動(dòng)力學(xué)院,武漢 430033;2青島92196部隊(duì)裝備部,山東 青島 266011;3武漢理工大學(xué) 交通學(xué)院,武漢 430063)
應(yīng)用非線性系統(tǒng)運(yùn)動(dòng)穩(wěn)定性理論和同倫延拓?cái)?shù)值計(jì)算方法,分析了潛艇水下運(yùn)動(dòng)的穩(wěn)態(tài)響應(yīng)及運(yùn)動(dòng)穩(wěn)定性,潛艇應(yīng)急上浮運(yùn)動(dòng)穩(wěn)定性實(shí)例分析結(jié)果通過其大攻角六自由度運(yùn)動(dòng)方程數(shù)值積分的動(dòng)態(tài)仿真進(jìn)行了驗(yàn)證,表明穩(wěn)定性分析結(jié)果是正確的。從而說明了采用同倫延拓法分析潛艇水下運(yùn)動(dòng)穩(wěn)定性是有效的。
潛艇;運(yùn)動(dòng)穩(wěn)定性;非線性動(dòng)力學(xué);同倫延拓法
1 引 言
潛艇是主要在水下活動(dòng)的航行體。為了保證潛艇水下航行安全,特別是在艙室破損進(jìn)水、舵卡等事故狀況下的安全,清楚地了解潛艇的動(dòng)態(tài)響應(yīng)特性和穩(wěn)定性是至關(guān)重要的。

上述穩(wěn)定性評(píng)價(jià)指標(biāo)基于如下假設(shè):在小擾動(dòng)基準(zhǔn)直線運(yùn)動(dòng)中,水平面運(yùn)動(dòng)與垂直面運(yùn)動(dòng)之間的耦合相對(duì)較弱,可以忽略。但是,對(duì)于高速航行的潛艇,在航行的極限狀態(tài)或應(yīng)急狀態(tài)下,上述關(guān)于水平面與垂直面之間運(yùn)動(dòng)不耦合的假設(shè)不再成立,此時(shí)在所有六個(gè)自由度都可能發(fā)生大幅運(yùn)動(dòng),各種運(yùn)動(dòng)模態(tài)之間的非線性相互作用變得非常顯著。因此,簡單地使用指標(biāo)Gv和Gh可能導(dǎo)致不正確的結(jié)論。此時(shí)必須考慮水平面與垂直面運(yùn)動(dòng)之間相互耦合的運(yùn)動(dòng)特性。
潛艇的水下運(yùn)動(dòng),尤其是應(yīng)急情況下的操縱運(yùn)動(dòng)通常是非線性的。隨著非線性理論的日益成熟,運(yùn)用非線性動(dòng)力學(xué)理論對(duì)潛艇的運(yùn)動(dòng)微分方程進(jìn)行分析,能夠更準(zhǔn)確地對(duì)潛艇的運(yùn)動(dòng)規(guī)律作出描述,從而得到更準(zhǔn)確的結(jié)論。本文運(yùn)用非線性系統(tǒng)運(yùn)動(dòng)穩(wěn)定性理論,對(duì)潛艇水下運(yùn)動(dòng)穩(wěn)定性的分析方法進(jìn)行了深入研究。
2 非線性系統(tǒng)運(yùn)動(dòng)穩(wěn)定性
運(yùn)動(dòng)穩(wěn)定性理論自Lyapunov于十九世紀(jì)九十年代創(chuàng)建以來,在物理科學(xué)和工程技術(shù)等各個(gè)領(lǐng)域都獲得了廣泛的應(yīng)用。
Lyapunov意義下的運(yùn)動(dòng)穩(wěn)定性理論是研究干擾因素對(duì)物體運(yùn)動(dòng)的影響。眾所周知,微小的干擾因素對(duì)物體運(yùn)動(dòng)的影響,對(duì)于不同的運(yùn)動(dòng)是不一樣的。對(duì)于一些運(yùn)動(dòng),這種影響可能并不顯著,因而受擾運(yùn)動(dòng)與未擾運(yùn)動(dòng)相差很小;反之,對(duì)于另外一些運(yùn)動(dòng),干擾的影響可能很顯著,以至于干擾力無論多么小,受擾運(yùn)動(dòng)與未擾運(yùn)動(dòng)隨著時(shí)間的推移而可能相差得很大。簡單地說,屬于前者的運(yùn)動(dòng)稱為穩(wěn)定的,而屬于后一類型的運(yùn)動(dòng)則稱為不穩(wěn)定的。由于在現(xiàn)實(shí)世界中,干擾因素總是不可避免地存在著,所以運(yùn)動(dòng)穩(wěn)定性的問題有很重要的理論意義和實(shí)際意義,這也正是穩(wěn)定性理論蓬勃發(fā)展的重要原因。
2.1 運(yùn)動(dòng)穩(wěn)定性判定方法
在研究工程問題時(shí),系統(tǒng)的漸近穩(wěn)定性具有特別重要的意義。那么如何判斷所考察的系統(tǒng)是穩(wěn)定的還是不穩(wěn)定的?Lyapunov直接法和Lyapunov一次近似法是兩種最基本的分析方法。由于Lyapunov直接法的成功與否取決于構(gòu)造合適的Lyapunov函數(shù)。Lyapunov函數(shù)的構(gòu)造需要一定的經(jīng)驗(yàn)和技巧,目前尚無一般規(guī)律。因此,Lyapunov一次近似法被廣泛應(yīng)用于非線性系統(tǒng)的穩(wěn)定性分析。
Lyapunov一次近似法的基本思想[2-3]是:將非線性系統(tǒng)線性化,僅保留一次項(xiàng),研究該線性系統(tǒng)的穩(wěn)定性。(1)如果一次線性近似系統(tǒng)的所有特征值都具有負(fù)實(shí)部,則原非線性系統(tǒng)的零解(平衡點(diǎn))是漸近穩(wěn)定的;(2)如果一次線性近似系統(tǒng)的特征值中只要有一個(gè)具有正實(shí)部,則原非線性系統(tǒng)的零解是不穩(wěn)定的;(3)如果一次線性近似系統(tǒng)存在實(shí)部為零的特征值,而其余所有特征值都具有負(fù)實(shí)部,此時(shí)非線性系統(tǒng)零解的穩(wěn)定性取決于系統(tǒng)的非線性項(xiàng),不能用Lyapunov一次近似法來研究,它的判定方法十分復(fù)雜和困難,本文試圖利用奇異性和分叉理論來分析。
2.2 運(yùn)動(dòng)穩(wěn)定度
物體的運(yùn)動(dòng)穩(wěn)定性通常均可通過分析系統(tǒng)方程的特征值λ的性質(zhì)來確定,當(dāng)特征值的實(shí)部Re(λ)<0時(shí),物體的擾動(dòng)運(yùn)動(dòng)逐漸衰減,且Re(λ)越負(fù),衰減越快,系統(tǒng)越穩(wěn)定;反之,當(dāng)Re(λ )>0時(shí),物體的擾動(dòng)運(yùn)動(dòng)越來越強(qiáng),且Re(λ)越大,系統(tǒng)越不穩(wěn)定;如果存在一對(duì)共軛復(fù)特征值,則物體運(yùn)動(dòng)會(huì)發(fā)生振蕩。因此,系統(tǒng)特征值λ實(shí)部的正負(fù)決定了系統(tǒng)的運(yùn)動(dòng)穩(wěn)定性,而λ實(shí)部的大小決定了物體擾動(dòng)運(yùn)動(dòng)衰減的快慢,如果λ存在一對(duì)共軛復(fù)數(shù),則物體擾動(dòng)運(yùn)動(dòng)周期性振蕩。
本文定義系統(tǒng)所有特征值的最大實(shí)部為系統(tǒng)的穩(wěn)定度 (degree of stability),記為e,即e=max Re λi(){}i=1,2,…,n,其中λi為系統(tǒng)的特征值,則e越負(fù)系統(tǒng)越穩(wěn)定,e越正系統(tǒng)越不穩(wěn)定。
3 同倫延拓非線性數(shù)值分析方法
同倫延拓方法是求解非線性問題的一種非常有效的方法,它克服了傳統(tǒng)迭代法局部收斂的弱點(diǎn),對(duì)初值的選取沒有嚴(yán)格限制,能夠全局收斂,可以求出問題的全部解。它雖然于二十世紀(jì)70年代才開始發(fā)展起來,但在短短的30多年里,同倫延拓方法已經(jīng)獲得了廣泛應(yīng)用[4-9]。傳統(tǒng)的求解方法如迭代法、消去法等存在的最大問題是依賴于初值的選取,初值選擇不當(dāng)常常導(dǎo)致迭代過程不收斂,而且很難求出全部解。因此,同倫延拓方法被譽(yù)為二十世紀(jì)數(shù)學(xué)研究中一項(xiàng)突破性的新成果[4]。
3.1 同倫延拓法的基本思想
同倫延拓法的基本思想[4-9]是借助同倫函數(shù)H,從輔助映射g的零點(diǎn)集出發(fā),跟蹤同倫方程組H(x, λ )=0的解曲線,走到目標(biāo)映射f的零點(diǎn)集。
為了求解非線性方程組f(x)=0,其中光滑映射 f:Rn→Rn,x={x1,x2,…,xn}T,選取具有已知零點(diǎn)的光滑輔助映射 g:Rn→Rn,將其與映射f構(gòu)成一線性同倫函數(shù)H:Rn×Rn→Rn,使得H( x, 0 )=g(x)和H( x, 1 )=f(x),典型的同倫函數(shù)為:

對(duì)于同倫方程組H( x, λ )=0,當(dāng)λ=0時(shí),其解與輔助方程組g(x)=0的解相同;讓同倫參數(shù)λ從0逐漸變化到1,并跟蹤同倫方程組的解,則當(dāng)λ=1時(shí),同倫方程組的解便是待解方程組f(x)=0的解。
3.2 同倫延拓算法
根據(jù)同倫延拓法的基本思想,利用同倫延拓法求解非線性方程組f(x)=0首先應(yīng)該選擇合適的輔助函數(shù)g(x)。g(x)的選取方法很多,本文選擇g(x)=f(x)-f( x( 0 ))。那么同倫函數(shù)為:

因此,H( x, 0 )=f(x)-f( x( 0 ))和H( x,1)=f(x),其中x(0)是系統(tǒng)f(x)=0對(duì)應(yīng)于λ=0時(shí)的解,x(1)是系統(tǒng)f(x)=0對(duì)應(yīng)于λ=1時(shí)的解,x(λ)是同倫方程組H( x( λ ),λ )=0的唯一解。
利用同倫延拓法,非線性方程組f(x)=0的求解問題轉(zhuǎn)化成了求解微分方程:

其中x(0)是系統(tǒng)f(x)=0的初始已知解。
微分方程(1)的求解可以采用任一種數(shù)值計(jì)算方法,本文采用4階Runge-Kutta法求解,則4階Runge-Kutta法的迭代公式為:


圖1 同倫延拓算法流程圖Fig.1 Flow of homotopy and continuation algorithm
式中:h為計(jì)算步長。同倫參數(shù)λ從0逐漸變化到1,則當(dāng)λ=1時(shí)的解x(1)即是系統(tǒng)f(x)=0的近似解。
為了避免由于Jacobi矩陣J(x)不可逆時(shí)上述Runge-Kutta算法失效,將計(jì)算ki的等式(2)改寫成求解如下線性方程:

具體算法流程見圖1。
4 潛艇水下運(yùn)動(dòng)非線性方程穩(wěn)態(tài)解
4.1 潛艇水下運(yùn)動(dòng)穩(wěn)態(tài)方程
為了研究潛艇運(yùn)動(dòng)的非線性特性,必須采用大攻角六自由度非線性運(yùn)動(dòng)方程,本文采用文獻(xiàn)[10-11]的潛艇運(yùn)動(dòng)方程,可化成一般形式:

式中狀態(tài)變量 x=[u,v,w,p,q,r,φ,θ,ψ ],控制變量 u= [δr,δb,δs,δB,xGB,yGB,zGB,n ],其中 δB=B-W,xGB=xG-xB,yGB=yG-yB,zGB=zG-zB,n 為螺旋槳轉(zhuǎn)速。
4.1.1 穩(wěn)態(tài)條件
潛艇水下運(yùn)動(dòng)的穩(wěn)態(tài)條件是:處于定常運(yùn)動(dòng)狀態(tài)(定常直航或定常回轉(zhuǎn)狀態(tài)),即

4.1.2 穩(wěn)態(tài)運(yùn)動(dòng)方程
將穩(wěn)態(tài)條件(6)式代入方程(5)便可得到潛艇水下穩(wěn)態(tài)運(yùn)動(dòng)方程:

4.2 潛艇水下運(yùn)動(dòng)方程穩(wěn)態(tài)解
由于穩(wěn)態(tài)方程(7)是高度非線性的,其解可能出現(xiàn)分叉和多解現(xiàn)象,因此本文使用同倫延拓法求解穩(wěn)態(tài)方程(7)的可能解。
潛艇在水下運(yùn)動(dòng)過程中,潛浮速度Vζ、橫傾角φ、縱傾角θ和攻角α是影響潛艇安全的主要參數(shù),所以重點(diǎn)分析穩(wěn)態(tài)的潛浮速度Vζ、橫傾角φ、縱傾角θ和攻角α隨控制參數(shù)u= [δr,δb,δs,δB,xGB,yGB,zGB,n ]的變化情況。
潛艇水下運(yùn)動(dòng)穩(wěn)態(tài)方程求解及運(yùn)動(dòng)穩(wěn)定性分析過程:
(1)通過動(dòng)態(tài)方程(5)采用數(shù)值積分法求得某一開始穩(wěn)定狀態(tài)的狀態(tài)變量值,以此作為同倫延拓算法的初值;
(2)以某一控制參數(shù)作為同倫參數(shù),其它控制參數(shù)的值保持不變,計(jì)算出各狀態(tài)變量隨同倫參數(shù)變化的穩(wěn)態(tài)解曲線及其Jacobi矩陣的特征值;
(3)改變除同倫參數(shù)以外的其它控制參數(shù)(作為擾動(dòng)參數(shù))的值,重復(fù)上面的計(jì)算,得出另一組穩(wěn)態(tài)解曲線。
(4)根據(jù)特征值的性質(zhì)確定平衡解的穩(wěn)定性。
4.3 潛艇水下運(yùn)動(dòng)穩(wěn)定性
潛艇水下運(yùn)動(dòng)方程可寫成如下形式:

式中狀態(tài)變量 x=[u,v,w,p,q,r,φ,θ,ψ ]。
為了分析潛艇水下運(yùn)動(dòng)在某個(gè)平衡狀態(tài)x0的穩(wěn)定性,根據(jù)Lyapunov線性化原理,將水下運(yùn)動(dòng)方程(8)在平衡點(diǎn) x0附近線性化,即:

其中A為f(x)在x0處的Jacobi矩陣,即

由運(yùn)動(dòng)穩(wěn)定性理論可知,若矩陣A的所有特征值有負(fù)實(shí)部,則平衡狀態(tài)x0是漸近穩(wěn)定的;只要矩陣A有一個(gè)特征值有正實(shí)部,則平衡狀態(tài)x0是不穩(wěn)定的。因此,當(dāng)系統(tǒng)的穩(wěn)定度e<0時(shí),則平衡狀態(tài)x0是漸近穩(wěn)定的;當(dāng)系統(tǒng)的穩(wěn)定度e>0時(shí),則平衡狀態(tài)x0是不穩(wěn)定的。
5 潛艇水下運(yùn)動(dòng)穩(wěn)定性分析實(shí)例
應(yīng)急上浮是潛艇在艙室破損進(jìn)水、舵卡等事故狀況下所采取的緊急操縱措施,是潛艇非戰(zhàn)時(shí)緊急脫險(xiǎn)的最有效方法。為了確保采取的操縱方法正確有效,保證潛艇應(yīng)急上浮安全,清楚地了解潛艇在應(yīng)急狀況下的動(dòng)態(tài)響應(yīng)特性和穩(wěn)定性至關(guān)重要。潛艇應(yīng)急上浮通常是一種大攻角強(qiáng)機(jī)動(dòng),描述潛艇的運(yùn)動(dòng)模型是強(qiáng)非線性的。下面針對(duì)潛艇應(yīng)急上浮運(yùn)動(dòng),以xGB為同倫參數(shù)分析潛艇運(yùn)動(dòng)穩(wěn)定性為例,說明本文提出的潛艇水下運(yùn)動(dòng)穩(wěn)定性非線性分析方法。潛艇模型參數(shù)及水動(dòng)力系數(shù)采用文獻(xiàn)[10-11]提供的數(shù)據(jù),其中艇重53.4kN,艇長5.3m。
5.1 穩(wěn)態(tài)解及特征值
計(jì)算條件:δr=δs=δb=0,n=1 000rpm,yGB=0,zGB=0.061m,以 δB為擾動(dòng)參數(shù),分別取 δB=1%W,5%W 和10%W,其中W為艇重,xGB的變化范圍為:-10%L~10%L,其中L為艇長。
計(jì)算結(jié)果如圖2~10所示。
5.2 結(jié)果與討論
由圖2~10可以看出:

圖2 對(duì)于不同δB航速U隨xGB的變化 Fig.2 Speed versus xGBfor variations in δB

圖3 對(duì)于不同δB橫傾角φ隨xGB的變化Fig.3 Roll angle versus xGBfor variations in δB

圖4 對(duì)于不同δB縱傾角θ隨xGB的變化Fig.4 Pitch angle versus xGBfor variations in δB

圖5 對(duì)于不同δB攻角α隨xGB的變化Fig.5 Attack angle versus xGBfor variations in δB

圖6 對(duì)于不同δB深度速率ζ˙隨xGB的變化 Fig.6 Speed depth versus xGBfor variations in δB

圖7 對(duì)于不同δB穩(wěn)定度隨xGB的變化Fig.7 Degree of stability versus xGBfor variations in δB

圖8 δB=1%W時(shí)系統(tǒng)特征值隨xGB的變化Fig.8 Eigenvalue versus xGBfor δB=1%W

圖9 δB=5%W時(shí)系統(tǒng)特征值隨xGB的變化Fig.9 Eigenvalue versus xGBfor δB=5%W
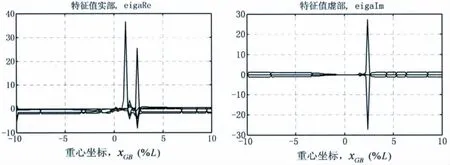
圖10 δB=10%W時(shí)系統(tǒng)特征值隨xGB的變化Fig.10 Eigenvalue versus xGBfor δB=10%W
(1)潛艇的航速、上浮速度和縱、橫傾角和攻角等的穩(wěn)態(tài)響應(yīng)在正浮力的作用下,在xGB=2%L附近均有一個(gè)突變值,由此看到了當(dāng)δr=0時(shí)(即不操方向舵),潛艇在正浮力作用下出現(xiàn)了突傾現(xiàn)象(見圖3),即出現(xiàn)了平面外運(yùn)動(dòng)的情況。在xGB的其它取值范圍內(nèi)潛艇運(yùn)動(dòng)的變化相對(duì)平穩(wěn)。
(2)由圖7可知,當(dāng)xGB=2%L左右時(shí)潛艇在正浮力作用下上浮速度、縱、橫傾發(fā)生突跳現(xiàn)象,主要是由于此時(shí)系統(tǒng)的穩(wěn)定度是一個(gè)較大的正數(shù)值。同時(shí)由圖8~10可以看出,系統(tǒng)特征值中出現(xiàn)了幅值較大的共軛虛數(shù),此時(shí)運(yùn)動(dòng)將發(fā)生大幅振蕩。
(3)圖7系統(tǒng)穩(wěn)定度表明,潛艇在正浮力作用下當(dāng)xGB≤0時(shí),穩(wěn)定度均為負(fù)值,其運(yùn)動(dòng)是穩(wěn)定的,同時(shí)由圖8~10可以看出,系統(tǒng)特征值存在一對(duì)幅值較小的共軛復(fù)數(shù),此時(shí)運(yùn)動(dòng)將發(fā)生輕微振蕩。xGB>0時(shí)穩(wěn)定度基本上為正值,其運(yùn)動(dòng)是不穩(wěn)定的。
因此,當(dāng)xGB≤0時(shí)潛艇在正浮力作用下,穩(wěn)定度均為負(fù)值,其運(yùn)動(dòng)是穩(wěn)定的,當(dāng)xGB>0時(shí),穩(wěn)定度過零點(diǎn),由負(fù)值變成正值,運(yùn)動(dòng)由穩(wěn)定變?yōu)椴环€(wěn)定,出現(xiàn)分叉點(diǎn),同時(shí)由圖8~10可以看出,在xGB=0前后系統(tǒng)特征值均為實(shí)數(shù),此時(shí)為靜態(tài)分叉。
6 數(shù)值仿真
為了驗(yàn)證前面穩(wěn)定性分析實(shí)例結(jié)果的正確性,本節(jié)采用穩(wěn)態(tài)方程(7)所對(duì)應(yīng)的文獻(xiàn)[10-11]提供的潛艇大攻角六自由度運(yùn)動(dòng)方程,潛艇模型參數(shù)及水動(dòng)力系數(shù)與前面穩(wěn)定性分析實(shí)例相同,采用文獻(xiàn)[10-11]提供的數(shù)據(jù),其中艇重53.4kN,艇長5.3m。利用Matlab通過龍格庫塔(Runge-Kutta)數(shù)值積分進(jìn)行了仿真,將仿真結(jié)果與前述分析結(jié)果進(jìn)行對(duì)比。
6.1 仿真結(jié)果
仿真條件:δr=δs=δb=0,n=1 000rpm,yGB=0,zGB=0.061m,δB=1%W, 其中 W 為艇重,xGB=-5%L 和 2%L,其中L為艇長。
仿真結(jié)果如圖11所示。
6.2 結(jié)果討論
由圖11的仿真結(jié)果可以看出:
(1)當(dāng)xGB=-5%L時(shí)潛艇縱傾角θ動(dòng)態(tài)響應(yīng)的穩(wěn)態(tài)解,由圖7可知該穩(wěn)態(tài)解是穩(wěn)定的。
(2)當(dāng)xGB=2%L時(shí)潛艇縱傾角θ動(dòng)態(tài)響應(yīng)的穩(wěn)態(tài)解,由圖7、8可知該穩(wěn)態(tài)解是不穩(wěn)定的,此時(shí)潛艇的縱傾響應(yīng)是一種周期性的振蕩運(yùn)動(dòng)。
因此,由上面的分析可知,通過數(shù)值積分前面穩(wěn)定性分析結(jié)果的正確性得到了初步驗(yàn)證,它與數(shù)值仿真的結(jié)果完全一致,說明了前述穩(wěn)定性分析結(jié)果是正確的。

圖11 xGB=-5%L和2%L,δB=1%W時(shí)潛艇縱傾的動(dòng)態(tài)響應(yīng)Fig.11 Pitch response for xGB=-5%L and 2%L, δB=1%W
7 結(jié) 論
本文對(duì)非線性系統(tǒng)運(yùn)動(dòng)穩(wěn)定性理論及其數(shù)值分析方法進(jìn)行了研究,提出了將同倫延拓非線性數(shù)值計(jì)算用于潛艇水下運(yùn)動(dòng)的穩(wěn)態(tài)響應(yīng)及運(yùn)動(dòng)穩(wěn)定性分析的新方法,潛艇應(yīng)急上浮運(yùn)動(dòng)穩(wěn)定性實(shí)例分析結(jié)果通過其大攻角六自由度運(yùn)動(dòng)方程數(shù)值積分的動(dòng)態(tài)仿真進(jìn)行了驗(yàn)證,表明穩(wěn)定性分析結(jié)果是正確的。從而說明了本文提出的潛艇水下運(yùn)動(dòng)穩(wěn)定性非線性分析方法是正確有效的。
[1]施生達(dá).潛艇操縱性[M].北京:國防工業(yè)出版社,1995.
[2]阮 炯,顧凡及,蔡志杰.神經(jīng)動(dòng)力學(xué)模型方法和應(yīng)用[M].北京:科學(xué)出版社,2002.
[3]陸啟韶.常微分方程的定性方法和分叉[M].北京:北京航空航天大學(xué)出版社,1989.
[4]王則柯,高堂安.同倫方法引論[M].重慶:重慶出版社,1990.
[5]Lee Jaewook,Chiang Hsiao-Dong.A singular fixed-point homotopy method to locate the closest unstable equilibrium point for transient stability region estimate[J].IEEE Transactions Circuits and Systems-II:Express Briefs,2004,51(4):185-189.
[6]Burden R L,Douglas Faires J.Numerical Analysis[M].Seventh Edition.Thomson Learning,2000.
[7]陳 永,李 立等.一種基于同倫函數(shù)的迭代法─同倫迭代法[J].數(shù)值計(jì)算與計(jì)算機(jī)應(yīng)用,2001(2):149-155.
[8]周 洲,祝小平,張肇?zé)氲?一種新的同倫解曲線跟蹤算法[J].西北工業(yè)大學(xué)學(xué)報(bào),1998,16(2):246-250.
[9]黃象鼎,曾鐘鋼,馬亞南.非線性數(shù)值分析[M].武漢:武漢大學(xué)出版社,2000.
[10]Ibrahim Aydin.Out of plane solutions of submarines in free positive buoyant ascent[R].AD-A271544,1993.
[11]Healey A J,Lienard D.Multivariable sliding mode control for autonomous diving and steering of unmanned underwater vehicles[J].IEEE Journal of Ocean Engineering,1993,18(3):327-339.
Study on nonlinear analysis of motion stability of submarines under water
DAI Yu-liang1,WANG Chang-hu2,MIAO Hai1,LIU Zu-yuan3
(1 Naval Architecture and Power College,Naval University of Engineering,Wuhan 430033,China;2 Equipment Department,Army 92196,Qingdao 266011,China;3 Transportation College,Wuhan University of Technology,Wuhan 430063,China)
The motion stability theory of a nonlinear system and the principles of continuation based on homotopy techniques were applied to stable state response and motion stability analysis of submarines during emergency ascent.The stability analysis results were verified by simulations using direct numerical integrations of the fully nonlinear,coupled six degrees-of-freedom equations of motion for the submarine.It indicates that homotopy and continuation theory techniques could be an effective analysis method for motion stability of submarines under water.
submarine;motion stability;nonlinear dynamics;homotopy and continuation theory techniques
U661.3
A
1007-7294(2011)08-0844-09
2010-10-11 修改日期:2011-03-28
國防預(yù)研項(xiàng)目資助(1010501020301)
戴余良(1966-),男,博士,副教授,主要從事船舶操縱運(yùn)動(dòng)建模、智能控制與實(shí)時(shí)仿真研究,E-mail:yuliang_dai@163.com。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44