地縣AVC協調控制的實現
2011-06-07 06:25:08陳天華栗杰鵬
電力工程技術 2011年6期
陳天華,杜 磊,栗杰鵬
(國電南瑞科技股份有限公司,江蘇南京 210061)
隨著我國電力系統的快速發展,電網規模不斷擴大,電網結構和運行方式變得日益復雜,這給電網的運行監控及安全分析帶來了巨大的挑戰。在無功電壓方面,以往一般采用局部、分散、人工的控制方式,缺乏彼此間的協調,這勢必影響了控制的時效性和準確性,難以達到良好的優化效果。隨著調度自動化系統技術的發展,無功電壓的優化分析與在線控制方面得到了前所未有的重視。最近幾年,自動電壓控制(AVC)系統[1]在各級電網中得到越來越廣泛的應用。AVC系統對全網無功電壓狀態進行集中監視和分析計算,從全局角度對廣域分散的無功源及無功補償裝置進行協調優化控制,是保持系統電壓穩定、提升電網電壓品質和整個系統經濟運行水平、提高無功電壓管理水平的重要技術手段。隨著各地自動化水平的提高,AVC系統不僅在省級和地區級電網得到應用,在有些縣級電網中,AVC系統也逐步接入使用。針對地縣兩級均有AVC系統的地區電網,為了有效利用電網中各種無功調節和電壓控制手段,基于無功分布的區域性特點,結合普遍采用的電網分級管理原則,建立地縣兩級互聯的地區全網的AVC系統,由縣級AVC系統直接控制轄區內的設備,地區電網AVC系統直接控制本級電網的設備,同時間接控制縣級電網。地縣AVC系統協調控制的實現具有明顯的實用意義。
1 無功優化及其模型
1.1 無功優化
電力系統無功優化是以滿足系統負荷要求和各種運行約束為前提,通過優化算法確定系統中各控制變量的值,以改善全網無功潮流分布,提高電壓質量從而達到降低電網損耗的目的。在理論上,可歸結為面向無功的最優潮流問題。無功優化具有目標函
1.2 全局優化模型
地調AVC以網損最小為無功優化[2]目標,以電壓及無功越限為罰函數,目標函數可表示為:

電壓與無功的越界值可定義為:
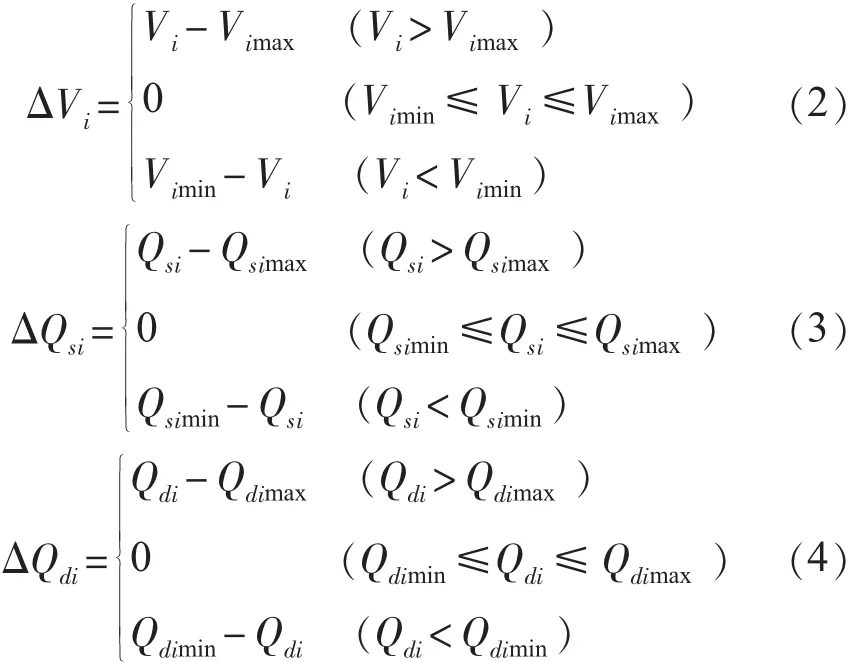
基于以上模型的無功優化可得到理論上的最優解,然而在一個實際且復雜的電力系統中,上述優化結果卻很難在線實現。首先,受實時電網運行方式變化以及大量遙測遙信數據采集速度與精度的影響,優化算法的收斂性得不到保證;其次即使使用狀態估計結果能使上述算法的收斂性問題得到一定程度的改善,但狀態估計結果準確與否仍要依賴于線路、設備參數的精確度;再次,上述優化結果不能完全考慮實際控制過程中的諸多問題,如各種控制變量的動作時序,設備動作時間間隔、動作次數等。因此,優化計算結果直接用于大規模系統實時控制的可靠性不高,可操作性也不強。本文結合地、縣級電網的特點,對上述優化模型進行簡化處理,并在此模型基礎上進行地縣兩級AVC的協調控制,使控制效果盡量接近最優。
1.3 區域無功控制模型
在110 kV配網解環運行后,當前大多數地區電網的網絡結構基本上呈輻射型樹狀分布,以一個輻射網絡作為一個控制區域,即可把整個電網劃分成若干在空間上彼此解耦的控制區域,各區域間的耦合性僅體現在關口的根節點上。結合控制靈敏度理論,可認為對一個區域內的電容器投切或者有載變壓器分接頭檔位的調節,只影響本區域內的無功分布和節點電壓水平,而對其他區域沒有影響或影響可以忽略,這樣對全網的無功電壓優化控制就可以由整個網絡縮小到對各個獨立區域分別進行控制,大大簡化了控制模型。
地調AVC可根據網絡連接關系和設備參數建立各分區的靜態模型,并利用數據采集與監控系統(SCADA)在線監測功能來讀取刀閘變位,實時跟蹤電網運行方式,實現動態分區。區域關口位于地調所管轄的220 kV變電站,當主變并列運行時,分區關口設定為該站220 kV母線;當主變分列運行時,分區關口位于220 kV主變高壓側。一個分區內包含一個220 kV變電站和若干個110 kV和35 kV變電站。對于每一分區,地調AVC也并不直接追求網損最小,而是盡量提高各母線節點的電壓并減少各支路上的無功傳輸,在盡可能小的區域內做到無功就地平衡。
(1)目標函數。其數學模型[3]可表達為:

式(5)中:P,Q 為支路傳輸的有功和無功;R,X 為支路的電阻和阻抗;U為計算節點的電壓。
當支路傳輸有功一定且支路參數不變的情況下,要使目標函數達到最小,應使Q=0,U靠近上限。
(2)約束條件。電壓滿足限值約束,關口無功或功率因數合格。
(3)控制變量。地區電網可控設備為并聯電容器/電抗器和變壓器分接頭。并聯電容器/電抗器和變壓器分接頭為離散型變量,每天調節次數有限。前者向系統注入或者吸收無功,后者可改變無功分布。
分區建立后,地調AVC系統實時掃描各分區關口電壓無功,并綜合考慮區域內各站電壓水平、無功備用和設備狀態等情況,采用該分區靈敏度矩陣預判設備動作對關口無功、母線電壓的影響,并最終給出控制指令。上述計算過程不依賴于全網潮流計算結果,具有計算速度快、簡單可靠、各分區間并行計算的特點。
2 協調控制原理
根據目前普遍的調度體系特點,縣調管轄35 kV和部分110 kV站,地調管轄220 kV及部分110 kV站,如圖1所示。在區域控制模型中,同一個區域中的設備可能分屬于不同的調度系統,地縣協調控制的關鍵在于如何協調隸屬于不同管理范圍的變量。

地調AVC主站系統是地區全網無功電壓協調控制的核心,可直接控制地調管轄內的變電站低壓無功補償設備及主變分接頭,但對于縣調AVC系統管轄內的110 kV變電站,地調AVC只能根據各分區計算結果對其關口(聯絡線或變壓器)下發無功或者功率因數范圍目標值,并對相應高壓側母線下發電壓合格范圍作為約束條件,縣調AVC系統控制策略應以110 kV及以上等級電壓安全穩定為前提,以地調下發值為目標值二次計算得出。
3 協調控制方案
為了適應地縣兩級電網無功電壓管理權限的特點,地縣兩側AVC系統要實現在空間和時間上的協調控制。
3.1 空間協調
地調AVC主站基于地區全網的模型進行無功電壓計算,對于地調直接控制的變電站,通過直接下發電容器/電抗器投切和分接頭調節等控制命令,保證直轄內各重要變電站的電壓質量和無功合理分布。對于縣調控制的變電站,地調AVC主站通過下發聯絡線或變壓器關口的功率因數或無功目標以及關口母線電壓范圍給縣調AVC系統,引導縣級電網的電壓和無功控制方向。
縣調AVC系統基于縣調的控制模型,并實時接收地調下發的各關口控制目標,按照地調的目標計算各變電站的控制策略。地縣兩級AVC系統耦合于模型的關口點,進行數據交互,達到空間上的協調。在協調過程中還需進行數據安全范圍驗證和實時性辨識,以保證協調控制的安全性。
3.2 時間協調
地縣兩級在時間上進行分解協調的控制,主要體現2點。
(1)對于并聯電容器/電抗器等具有動作次數限制的離散控制對象,首先要保證電容/電抗器自身的動作次數和動作時間間隔要滿足安全約束。另外也要考慮兩級之間相關設備(例如同區域的并聯容抗器)的協調控制。地調AVC系統直接發出的控制指令和下發給各縣調AVC的控制策略間應要有合適的時序,避免同一區域內設備重復動作或無功竄動。
(2)地縣控制周期設為5 min,即每5 min地調向縣調下發一次關口目標指令。周期內,各系統進行各自獨立的優化計算并執行各自的控制策略,另外,下發的目標也必須控制在步長之內,以保證控制的穩定性。電壓無功控制就是一個反復交叉迭代、分解協調控制的過程。對于在線控制系統,不期望通過一次控制策略就使系統網損達到最優,而是通過序列調節滿足電壓水平和減少無功傳輸的策略,逐步接近最優目標。
4 地縣互聯的實現
某地調AVC系統基于調度自動化系統(EMS)/SCADA系統一體化設計,同時與5個縣調AVC系統的進行聯合控制,系統結構如圖2所示。

地調AVC系統擁有本地區電網全模型數據,利用地調SCADA系統的電網模型和實時遙信遙測數據進行動態分區并按區域進行電壓無功分析計算,進而得到電網電壓無功調節策略。然后,將與縣調AVC系統約定的控制信息,通過具有操作簡單且免維護特點的E語言文本方式下發到各縣調AVC系統中。縣調AVC系統不必考慮管轄范圍外的電網模型,只需實時接受地調AVC的協調控制指令,結合縣調SCADA系統中獲取的實時數據對轄區內設備進行控制。地縣兩級AVC系統相協調,從而完成對地區電網的無功優化和自動電壓控制。
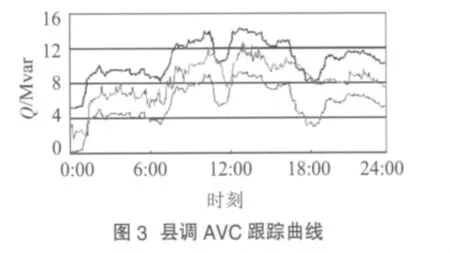
地縣聯調中某110 kV關口的日無功跟蹤曲線如圖3所示。其中間一條曲線為關口實時無功曲線,另外2條曲線為地調下發的無功上下限曲線。從圖中可看出地調AVC根據該站上傳的無功備用信息計算出該站無功范圍并以控制目標方式下發,該站能實時響應并滿足該目標,從而達到了地縣AVC協調控制的目標。
另外,從該系統2011年初開始實現地縣兩級AVC系統聯合協調控制以來的運行情況來看,能更好地對整個地區的無功電壓分配,并利用區域內所有可調設備來進行調控,使調節結果更優,取得了不錯的運行效果,進一步優化了無功潮流,降低了網損,減少了由于各自獨立運行時調壓引起的設備調節振蕩,緩解了地區電網功率因數調節的壓力,減少了地區電網無功補償設備的投切次數,大大降低了調度運行人員的工作量。
5 結束語
本文在無功電壓分布區域性及目前調度分級管理體系的基礎上,提出了地縣AVC系統協調控制的總體技術方案,并詳細闡述了協調控制原理及控制方案的實現。實際應用效果表明本文所提出的協調控制方案是合理和有效的。
[1]黃 華,高宗和,戴則梅,等.基于控制模式的地區電網AVC系統設計及應用[J].電力系統自動化,2005,29(15):77-80.
[2]趙美蓮,賴業寧,劉海濤,等.實時無功優化研究及其在線實現[J].電力系統保護與控制,2009,37(23).
[3]唐寅生,李碧君.電力系統OPF全網最優無功的經濟壓差△UJ 算法及其應用[J].中國電力,2000,33(9):42-44.
[4]程 亮,蘇義榮,謝 敏.地縣級電網全局無功優化的研究和軟件開發[J].江蘇電機工程,2005,24(1):38-40.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中國特種設備安全(2022年6期)2022-09-20 02:52:28
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:26:08
光學精密工程(2016年6期)2016-11-07 09:07:19