太陽電池陣鎖定沖擊試驗方法
2011-06-08 05:04:30陶炯鳴張春雨蔣國偉
航天器環境工程 2011年5期
關鍵詞:測量
陶炯鳴 ,張春雨,蔣國偉,王 萌
(1.上海交通大學 機械與動力工程學院,上海 200030;2.上海衛星工程研究所,上海 200240)
0 引言
太陽電池陣是衛星的關鍵部件之一,負責為衛星的運行提供電源。目前大多數衛星采用可展開式太陽電池陣,在進入預定軌道之后通過展開機構中的驅動彈簧使太陽電池陣展開到位[1]。太陽電池陣在展開過程中不斷加速,因此在到位鎖定時由于動能瞬間轉化為應變能會對衛星本體或者與其直接連接的驅動機構產生沖擊載荷,嚴重時將導致衛星姿態失控或驅動機構部分功能失效,最終影響衛星壽命。
其他相關研究和工程研制的實踐經驗表明,在太陽電池陣鎖定時刻的主要破壞形式為:繞根部鉸鏈轉軸方向的沖擊力矩過大導致衛星本體和驅動機構被破壞。因此本文通過試驗的方法對太陽電池陣根部鉸鏈在鎖定瞬間的應變進行采集,然后分析、處理試驗數據獲取太陽電池陣鎖定時產生的沖擊力矩,并將其與仿真分析的結果進行比對,從而評估試驗效果并提出相應的改進措施。
1 仿真分析結果
某衛星太陽電池陣由一個連接架和三塊基板組成,連接架和基板之間通過展開鉸鏈鉸接在一起(如圖1所示)。它們在發射階段通過壓緊釋放裝置折疊收攏在衛星的側壁上,進入預定軌道后響應解鎖指令,在鉸鏈內驅動彈簧的作用下展開并在規定位置鎖定。分析模型主要由星體、連接架、基板、展開鉸鏈4部分組成,仿真分析時分別考慮了在軌運行和地面試驗兩種環境,采用剛柔耦合的建模方法[2]。在進行地面試驗環境下的仿真分析時加入了空氣阻力的影響,空氣阻力的模型簡化為在每塊基板上施加一垂直于基板的集中力,其大小與基板的面積和展開速度相關[3]。兩種環境下的仿真分析結果如表1所示。
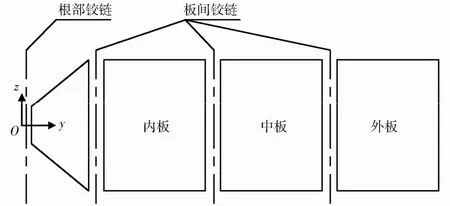
圖1 太陽電池陣構成Fig.1 The composition of solar cell array
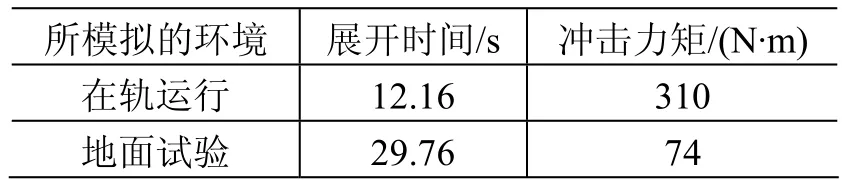
表1 太陽電池陣鎖定沖擊力矩仿真分析結果Table 1 The simulation results of solar array’s impact torque
2 試驗方案及原理
試驗實施方案為在太陽電池陣模擬墻與根部鉸鏈之間串聯一個工裝,該工裝的兩端分別與模擬墻和根部鉸鏈連接,中間為一根矩形截面的測量桿,并在上面粘貼8個單向應變片作為應變測點。測量工裝的構型及應變測點的布置如圖2所示。
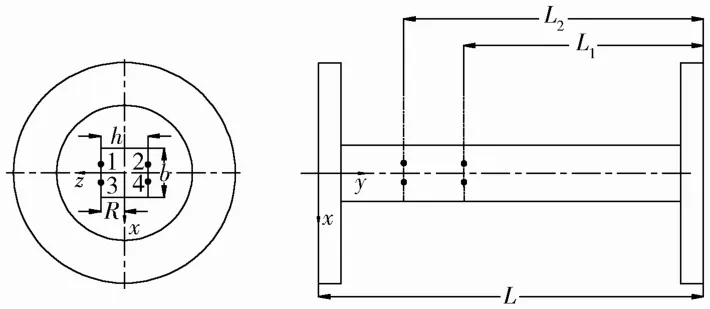
圖2 測量工裝及測點布置Fig.2 Measuring tool and the positions of measuring points
在圖2中的L1、L2處各布置4個應變測點,共8個測點。測量桿在彎曲狀態下其截面上的彎矩mz為

式中:E為材料的彈性模量;b、h分別為桿截面的長、寬;εn為相應測點的應變值,n為測點號。
在實際測量過程中,為了盡量減少噪聲和讀數誤差,采用了惠斯登全橋測量電路[4](如圖3所示),并放大了采集信號的數值。
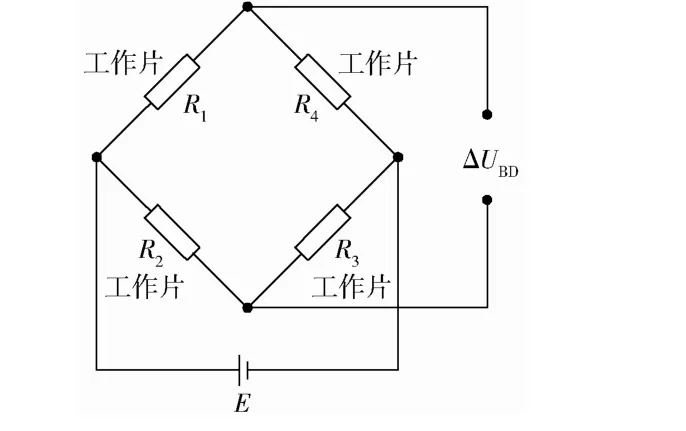
圖3 全橋測量電路Fig.3 Full bridge topology circuit
3 鎖定沖擊試驗
3.1 測試系統
鎖定沖擊試驗的應變測量采用 DH5920動態信號測試系統。該系統包含動態信號測量所需的信號適調器(應變、振動等適調器)、直流電壓放大器、低通濾波器、抗混濾波器、16位A/D轉換器以及采樣控制和計算機通訊的全部硬件。測試系統框圖如圖4所示。
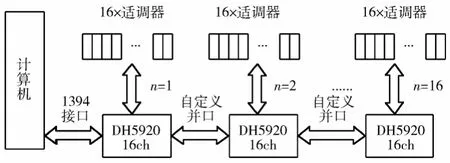
圖4 測試系統框圖Fig.4 Block diagram of the measuring system
試驗過程中采樣頻率設置為5.12 kHz。在每次測量前先對各通道橋盒進行平衡,再對各通道進行清零,使外界噪聲干擾小于15 με,然后進行測量。若干擾或者各通道零位漂移的幅度較大,則需要繼續平衡和清零,直到各通道的外界噪聲干擾以及零位漂移均符合要求。
3.2 測試系統標定
在試驗之前,為了確保測試系統的準確性以及數據采集通道的有效性,對整個測試系統進行了標定。標定時在原測量工裝上再串聯一個懸臂桿,并在桿一端懸掛了20~50 kg的標準砝碼(如圖5所示)。通過采集截面上的應變獲得彎矩值,并與理論計算值進行比對,以評估測試系統的準確性(見表2)。

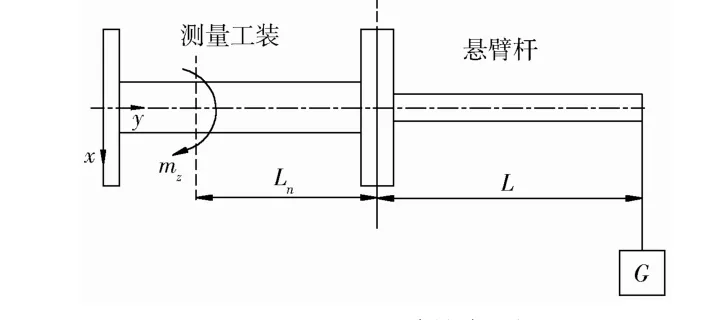
圖5 測試系統標定Fig.5 Calibration of the measuring system
測試系統標定中懸臂桿的截面彎矩mz為
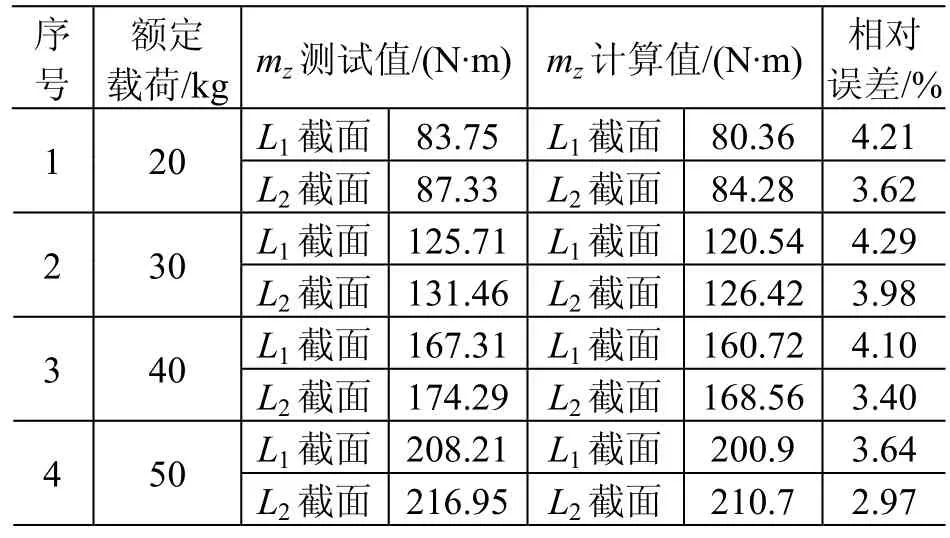
表2 測試系統標定數據Table 2 The calibrational data of the measuring system
通過標定數據可以看出測試系統狀態良好,系統誤差控制在4.5%以內。
3.3 試驗過程及數據處理
試驗中太陽電池陣安裝于模擬墻上,根部鉸鏈與模擬墻之間串聯一個測量工裝,如圖6所示。
為了模擬空間的零重力環境,在每塊基板上均安裝氣浮組件,在展開過程中氣浮組件的氣盤表面產生一層氣膜,托起太陽電池陣在光滑的大理石平臺上自由運動。太陽電池陣展開過程如圖7所示。
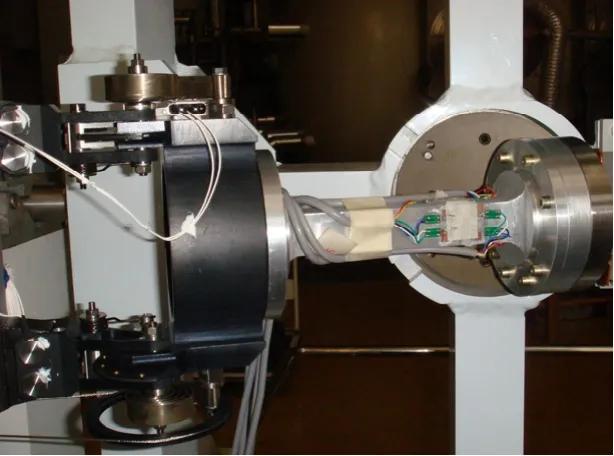
圖6 太陽電池陣與測量工裝的連接狀態Fig.6 The connection of the measuring tool and the solar cell array
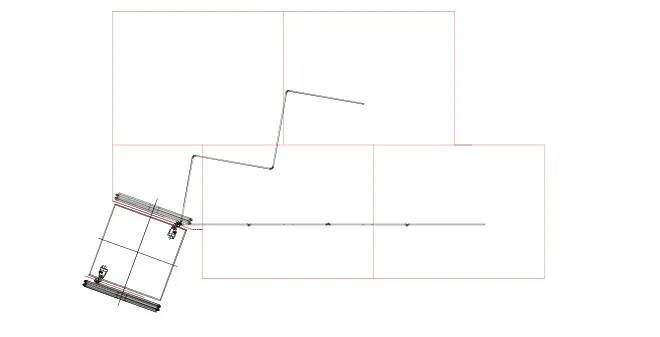
圖7 太陽電池陣展開過程Fig.7 The deployment of solar cell array
在試驗前將太陽電池陣收攏壓緊在模擬墻上;試驗時手動釋放太陽電池陣,使其在展開鉸鏈驅動彈簧的作用下自由展開,測試系統實時測量展開過程中工裝上各個測點的應變以及展開時間。應變變化情況如圖8所示。
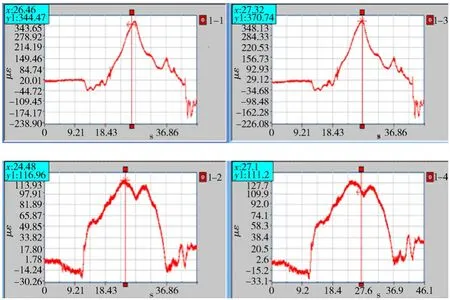
圖8 應變變化情況Fig.8 The variations of strain
整個試驗過程中共進行了 4次太陽電池陣的展開及應變測量,測量數據如表3所示。

表3 沖擊力矩測量結果Table 3 The measuring results of impact torque
4 試驗結果及分析
試驗結果與仿真結果如表4所示,可以看出沖擊力矩的實測結果與地面試驗環境下的仿真分析結果較為接近,但是與在軌運行環境下的仿真分析結果偏差較大。

表4 試驗結果與仿真分析對比Table 4 Comparison between the test results and the simulation results
出現上述結果的主要原因是:在地面試驗環境下,由于空氣阻力的存在耗散了太陽電池陣展開過程中的一部分動能,特別是在太陽電池陣面積較大的情況下這種影響更大;另外在地面試驗時為了模擬空間零重力環境,通過氣浮方式平衡太陽電池陣自身的重力,而氣浮組件與氣浮平臺之間存在一定的摩擦阻力。由于以上這些環節引入的附加阻尼導致太陽電池陣地面試驗的展開時間大于實際的在軌展開時間,因此測得的沖擊力矩必然小于實際在軌工作情況。
為了更準確地獲取太陽電池陣在軌展開時的沖擊力矩,有必要對試驗方法做進一步改進,其主要目的是減少展開過程中系統的附加阻尼,使得太陽電池陣地面展開時間接近于在軌展開時間。可以采取的主要措施如下:
1)采用質量特性模擬的方式,試驗時將框架式結構替代原來的太陽電池陣基板結構,以減少展開過程中空氣阻力的影響;
2)嚴格控制氣浮平臺的平面度,盡量減少展開過程中氣浮組件與平臺之間的摩擦阻力;
3)適當增加展開鉸鏈的驅動力矩以平衡一部分由于地面試驗環境所帶來的附加阻尼;
4)采用模擬真空環境的專用設備進行該沖擊試驗。
5 結束語
通過太陽電池陣展開鎖定沖擊試驗對鎖定瞬間太陽電池陣根部的應變進行了測量,并計算得到了繞根部鉸鏈展開軸線的沖擊力矩。但是由于地面試驗環境與衛星軌道環境存在的差異導致目前所獲得的試驗數據與太陽電池陣在空間展開時的真實沖擊力矩相差較大。通過試驗數據與仿真分析結果的相互比對,認為消除了地面環境因素影響的在軌環境的仿真分析結果可以作為工程研制的參考數據。另外也可以通過進一步改進試驗方案,消除系統附加阻尼,以獲得更準確的太陽電池陣在軌展開沖擊力矩。
(References)
[1]陳烈民.航天器結構與機構[M].北京: 中國科學技術出版社, 2005
[2]劉錦陽, 洪嘉振.衛星太陽電池陣的剛柔耦合動力學[J].空間科學學報, 2004, 24(5): 367-372
Liu Jinyang, Hong Jiazhen.Rigid-flexible coupling dynamics of satellite solar battery[J].Chinese Journal of Space Science, 2004, 24(5): 367-372
[3]張凡力, 張美艷, 唐國安, 等.太陽能電池陣地面展開試驗的仿真技術[J].振動與沖擊, 2007, 26(7): 23-25
Zhang Fanli, Zhang Meiyan, Tang Guoan, et al.Simulation technology for deployment test of solar arrays on ground[J].Journal of Vibration and Shock,2007, 26(7): 23-25
[4]王習術.材料力學行為試驗與分析[M].北京: 清華大學出版社, 2007
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
