載人飛船有效載荷搭載技術及試驗驗證
2011-06-08 05:04:50韓彬,游進,劉萍
航天器環境工程 2011年6期
韓 彬,游 進,劉 萍
(中國空間技術研究院 載人航天總體部,北京 100094)
0 引言
隨著載人航天事業的快速發展,利用載人飛船搭載有效載荷進行空間科學實驗的需求越來越迫切,逐漸成為一項重要的載人航天飛行任務[1-3]。迄今為止,載人飛船作為天地往返運輸的唯一有效工具,其有效載荷的搭載能力對于提高飛行任務的效費比至關重要。
以往飛船返回艙搭載的物品,大部分不需要由飛船進行供電、溫濕度控制,而且物品的體積小、質量少,因此返回艙能夠提供足夠的安放空間。“神舟八號”飛船首次執行交會對接任務,需要搭載3臺有效載荷設備進行空間生命科學試驗,無論是體積還是質量均遠遠大于以往的搭載物品,并且對安裝的力學、熱學環境要求嚴格。成功完成“神舟八號”飛船與“天空一號”目標飛行器的交會對接任務是本次飛行任務的主目標,而空間生命科學試驗作為一項重要任務必須服從于主目標,不允許因空間生命科學試驗給整個交會對接任務帶來風險,對飛船搭載的有效載荷的安全可靠性提出更高要求。因此,安放空間以及有效載荷與飛船各接口的可靠性是有效載荷搭載方案設計時需要著重考慮的問題。本文針對返回艙具體情況提出了有效載荷設備搭載安裝方案,并對方案進行了試驗驗證。
1 有效載荷設備搭載安裝方案設計
返回艙內可用于設備安裝的區域有側壁區、大底區和座椅區。由于側壁區不能提供合適的設備安裝接口,大底區無法實現快速拆裝,故不考慮側壁區和大底區作為有效載荷的安放空間。座椅區基本滿足有效載荷的搭載安放要求,因此可選擇其作為有效載荷安放區域。
1.1 有效載荷搭載安裝方案設計的相關要求
1)有效載荷搭載安裝方案應保證各有效載荷設備拆裝方便,其靜態/動態包絡不應與艙內其他設備發生干涉,滿足設備的熱學環境要求;
2)改裝后的返回艙座椅和配重措施均應滿足返回艙質量特性的要求;
3)改裝后的座椅和有效載荷與飛船的各接口應滿足振動試驗的力學環境要求,確保各接口連接的可靠性。
1.2 有效載荷設備艙內安裝方案設計
根據返回艙內布局(如圖1(a)所示)及以往搭載方案,座椅區有效載荷設備安放方案有兩種。第一種是采用飛船早期方案,即在第II象限位置安裝有效載荷支架。此方案雖可行,但會導致返回艙質心與飛船標準狀態(返回艙按3個航天員座椅進行布局)的質心偏差過大,必須在返回艙底部通過增加配重來調整質心,對系統質量指標影響較大。第二種方案是對航天員座椅進行改裝,即在其上設計一個轉接支架,1臺有效載荷設備安放在轉接支架上方,另2臺有效載荷設備倒掛在轉接支架下方,該方案的艙內布局如圖1(b)所示。由于此方案沒有改變3個座椅布局,并且座椅采用可膠接賦形鉛板,較容易實現座椅-有效載荷設備的質量特性與座椅-假人系統一致,從而可確保對整船質量特性的影響最小。另外,在支架前部和后部設計合適的開口,可滿足有效載荷設備的散熱要求,支架前部開口還可作為電纜插拔操作口。
經過比較,決定采用第二種方案。航天員座椅與有效載荷設備的安裝如圖2所示。
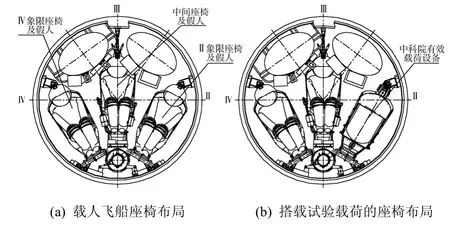
圖1 飛船返回艙座椅布局Fig.1 Configuration of astronaut seats in the recoverable module
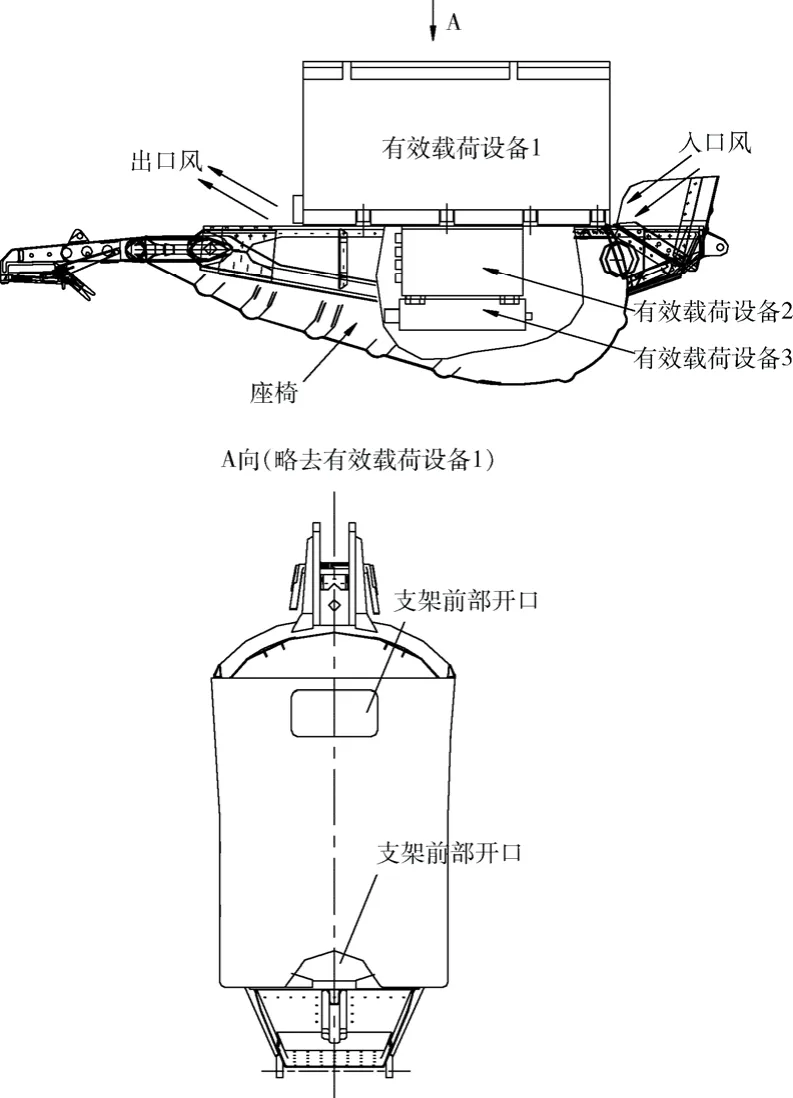
圖 2 有效載荷設備在座椅上安裝示意圖Fig.2 Installation of the payload on the astronaut seat
1.3 有效載荷設備靜態/動態外包絡分析
在返回過程中航天員座椅需要提升操作,而安裝在轉接支架上方的有效載荷設備外形尺寸較大,必須確保設備在座椅正常狀態及提升狀態下,即其靜態/動態外包絡不應與艙壁及艙內其他設備發生干涉,倒掛在轉接支架下面的2臺有效載荷設備的靜態外包絡必須與座椅底部留有安全距離。
對安裝在轉接支架之上的有效載荷進行動態外包絡分析時,由于安裝環境較復雜,其動態包絡不便數字模擬,故采取在飛船艙內進行實物模擬裝配的方式,以確保設備在航天員座椅正常狀態和提升狀態下均不與側壁及艙內其他設備發生干涉。
對倒掛在轉接支架之下的2臺有效載荷設備進行靜態外包絡分析時,建立1∶1的航天員座椅三維數字模型,并在三維模型上對這2臺設備進行模擬裝配,以確保設備安裝到位后不與座椅底部發生干涉。三維模型裝配靜態包絡如圖3所示,虛框部分為倒掛的有效載荷設備靜態外包絡。
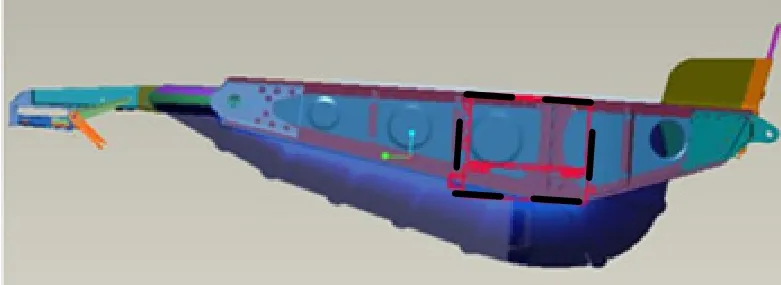
圖3 包絡分析的三維模型Fig.3 Three dimensional model for the contour analysis
1.4 座椅組件改裝及配重
通過三維數字模擬及艙內實物試裝驗證了有效載荷設備安裝方案的可行性。為實現該方案,需對座椅組件進行改裝。正常狀態下,載荷可通過賦形墊均勻加載到座椅上。由座椅的結構可知,其兩側的上緣條端頭均有鋼制承力件支撐,中部有3條加強筋支撐,故轉接支架的設計可按照賦形墊傳遞載荷的方式,將有效載荷設備的重量通過轉接支架均勻地施加到兩側的上緣條上。
正常狀態下,航天員座椅內安裝了假人和賦形墊,假人的重量通過賦形墊均勻地施加到座椅內的鋁蒙皮上;并且由于假人臥在座椅內,整個座椅-假人系統的質心較低。按照有效載荷搭載安裝方案,安裝在轉接支架之上的有效載荷設備質量較大,使得座椅-有效載荷的質心較高。為消除因座椅改裝對整艙質心的影響,需將改裝后座椅組件(含支架和有效載荷設備)按照標準座椅組件(含賦形墊和假人)狀態進行配重。
因此,采用在座椅椅盆、椅背內側粘貼賦形鉛板的方式,確保座椅蒙皮承受的依然為均布載荷。通過配重實施,座椅-有效載荷的質心被成功地控制在正常范圍內。
2 改裝后座椅的振動試驗
為驗證改裝后座椅及轉接支架的結構強度并獲取有效載荷設備力學環境條件,進行了振動試驗。
將座椅與有效載荷設備安裝至試驗工裝上,如圖4所示。振動采用三點平均控制,控制點在座椅和工裝對接面[4-7]。
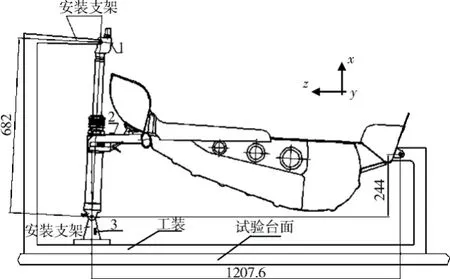
圖 4 座椅系統與工裝的連接Fig.4 The connection between the seat system and the test installation
2.1 振動輸入控制點、響應測點布局與加載條件
在試驗工裝的頭部、上底面中部和腳部分別布置3個振動輸入控制點,在有效載荷設備及轉接支架上布置6個(即A01~A06)測點。振動輸入控制點及響應測點的布置如圖5所示。
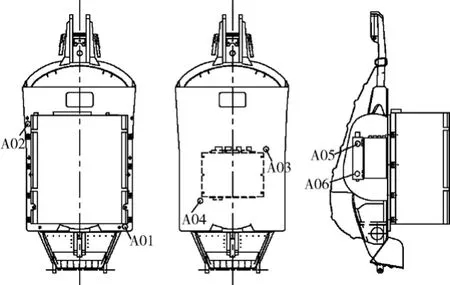
圖 5 試驗工裝上的振動輸入點及試驗件響應測點的布置圖Fig.5 Locations of vibration control points in the test installation and the response measuring points in the test piece
試驗時,首先在3個方向上進行驗收級試驗,然后再在3個方向上進行鑒定級試驗。各個方向上,先進行正弦掃描振動試驗,然后進行隨機振動試驗。x方向上進行的驗收級正弦掃描和隨機振動試驗的加速度加載曲線如圖6所示[8-9]。
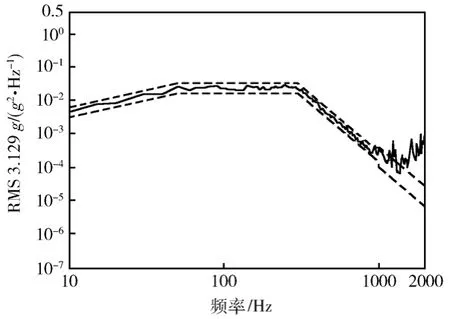
圖 6 x向驗收級試驗中的加速度加載曲線Fig.6 The acceleration loading curve in the x direction acceptance test
2.2 試驗數據分析
根據轉接支架面板上的A01~A04測點測得的加速度響應,可計算出這些響應測點對輸入控制加速度的幅值放大倍數,A01測點在3個方向驗收級試驗中,其與加載方向相對應的加速度響應與輸入控制加速度的比值如圖7所示。
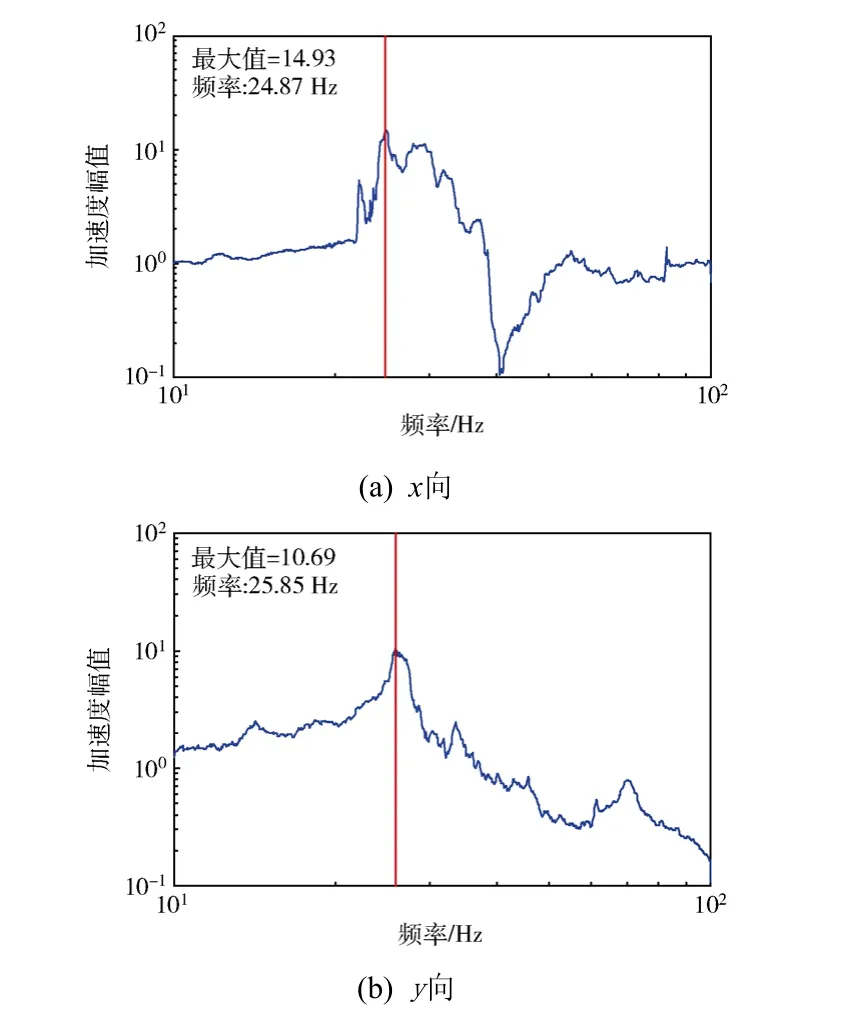
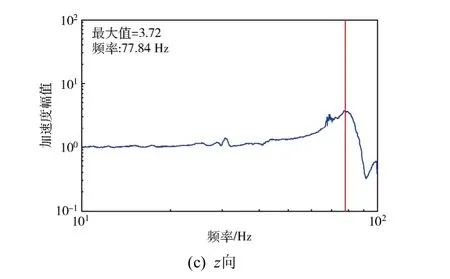
圖 7 A01測點在加載方向上的響應加速度與輸入加速度之比Fig.7 Ratio of acceleration response to input acceleration at the measuring point A01 in the loading direction
由圖7可見,試驗件在3個方向上的一階頻率分別為x向24.9 Hz、y向25.9 Hz和z向77.8 Hz。另外,圖中還反映出,有效載荷設備在頻率較高的頻段上,其響應幅值小于基座激勵的加速度幅值。
表1列出了A01~A06測點在正弦掃描振動試驗中的最大響應加速度幅值及其對應的頻率。由表中數據可見,對于大部分測點來說,它們的驗收級和鑒定級試驗的最大加速度響應所對應的頻率比較接近。驗收級和鑒定級試驗中響應最大的測點為:x向是A05X;y向是A05Y;z向為A05Z。另外,從表中還可見,A06測點在3個方向上的響應量級與A05比較接近。A05和A06測點粘貼在其中1臺倒掛設備的左右兩側。因此,該有效載荷設備相對于轉接支架的其他測點部位承受最為嚴厲的動力學環境。
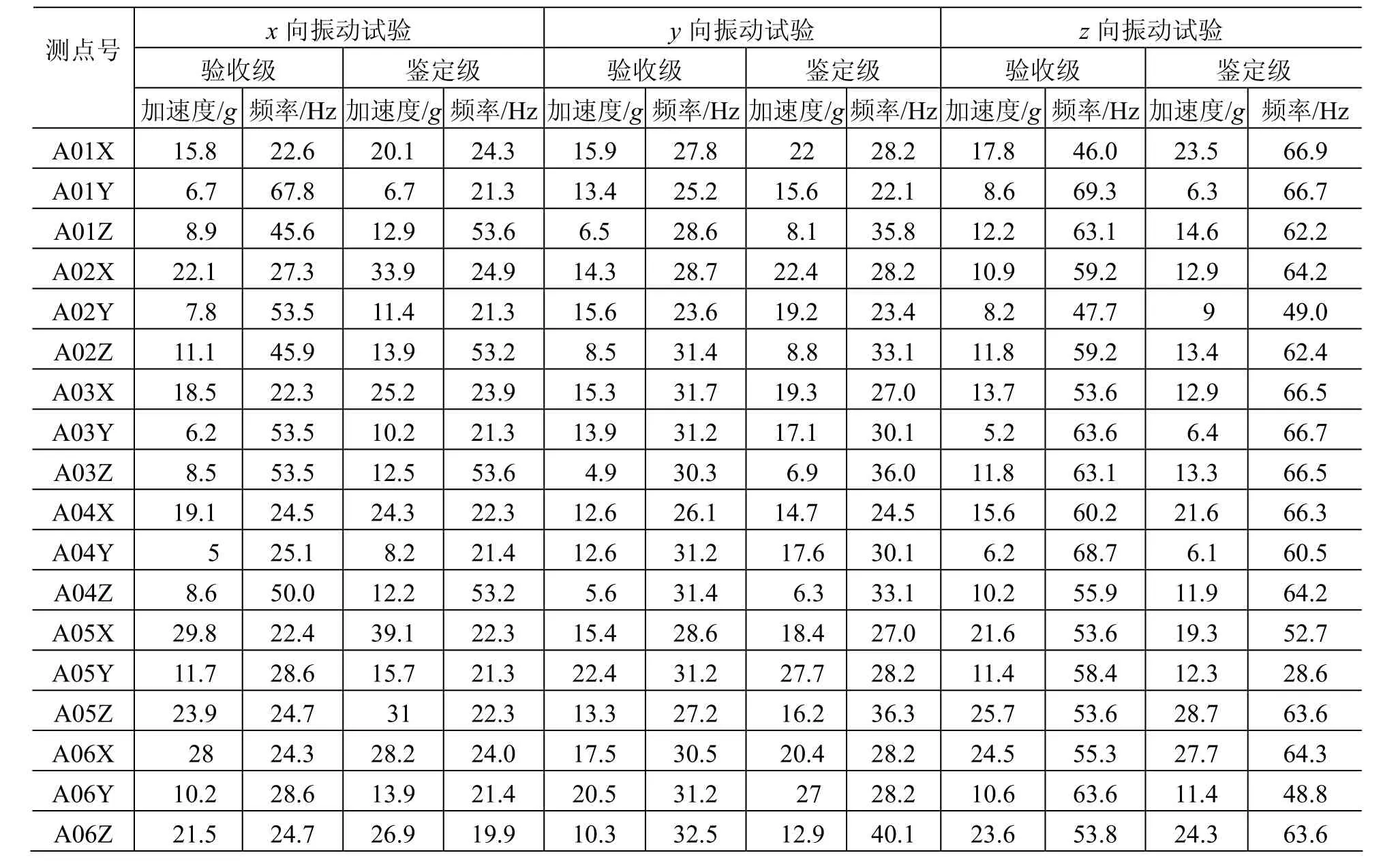
表 1 A01~A06各測點正弦掃描振動試驗中的最大加速度響應及對應的頻率Table 1 Maximum acceleration responses and their frequencies for points A01~A06 in the sine scan vibration test
表2為A01~A06測點在隨機振動試驗中的加速度均方根響應。驗收級和鑒定級試驗中響應最大的測點為:x向為A06X;y向為A05Y;z向為A05Z。這與正弦掃描振動試驗的結果大體一致。
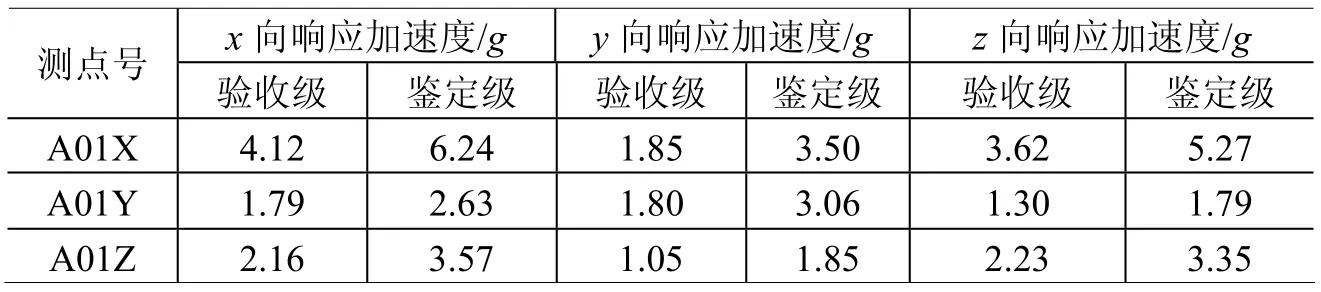
表 2 A01~A06各測點隨機振動試驗的加速度均方根(RMS)響應Table 2 RMS responses of acceleration for points A01~A06 in the random vibration test
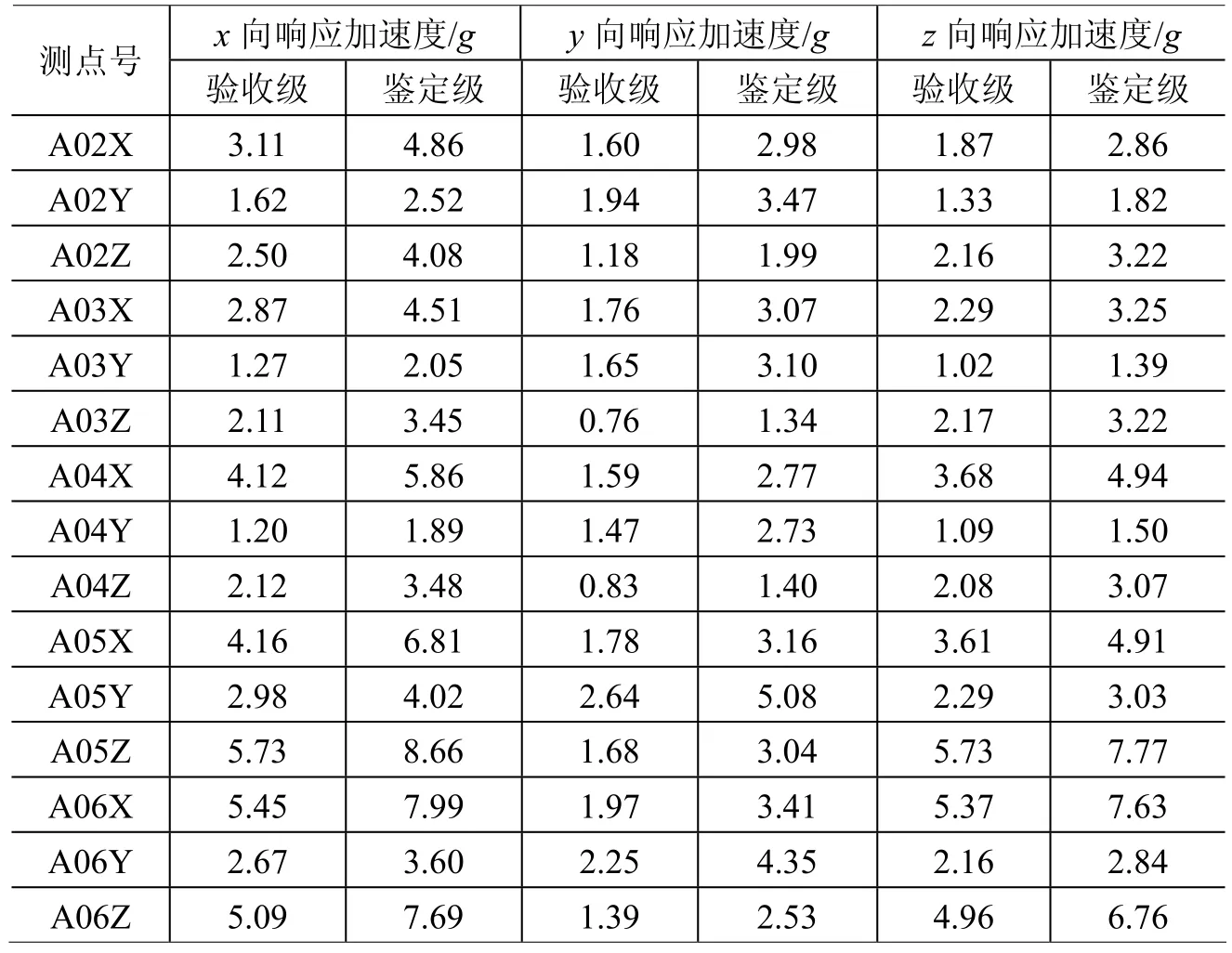
續表2
2.3 試驗評價
所有試驗完成后,座椅及其支架與有效載荷均未出現裂紋和其他異常,這些結構通過了強度考核,座椅緩沖機構各項功能正常,3臺有效載荷設備的力學環境條件均滿足指標要求。
3 結束語
在參考以往飛船返回艙有效載荷設備搭載方案的基礎上,結合返回艙實際布局及有效載荷設備情況,對“神舟八號”飛船的有效載荷搭載安裝方案進行了設計。經過振動試驗驗證,本方案很好地解決了此次搭載任務所遇到的問題,滿足了有效載荷搭載任務所提出的相關要求。本方案的成功實施可為后續飛船搭載任務提供借鑒。
(References)
[1]李春華, 倪潤立.中國返回式衛星和空間科學試驗[J].空間科學學報, 2009, 29(1): 124-129
Li Chunhua, Ni Runli.Recoverable satellites and space science experiments in China[J].Chinese Journal of Space Science, 2009, 29(1): 124-129
[2]朱毅麟.空間站應用的發展及存在問題[J].航天器工程, 2009, 18(1): 13-20
Zhu Yilin.Development and challenge of space station utilization[J].Spacecraft Engineering, 2009, 18(1): 13-20
[3]劉永健, 譚春林, 劉育強.空間平臺能力發展趨勢分析[J].航天器工程, 2011, 20(2): 72-77
Liu Yongjian, Tan Chunlin, Liu Yuqiang.Analysis of space platform capability develpoment tendency[J].Spacecraft Engineering, 2011, 20(2): 72-77
[4]李德葆, 陸秋海.工程振動試驗分析[M].北京: 清華大學出版社, 2009
[5]劉紀原.中國航天50年創業發展之路[J].國防科技工業, 2006(9): 15-18
Liu Jiyuan.The origination and development of Chinese space program for 50 years[J].Defence Science and Technology Industry, 2006(9): 15-18
[6]徐燕申.機械動態設計[M].北京: 機械工業出版社,1992
[7]生建友.機載電子設備的防振動抗沖擊設計[J].電子機械工程, 1992(2): 44-47
Sheng Jianyou.Guarding against vibration and resisting lash design of airborne electronic equipment[J].Electronics Machinery Engineering, 1999(2): 44-47
[8]溫建明.減震元件沖擊特性研究[J].噪聲與振動控制,2001(2): 18-21
Wen Jianming.Study on impact characteristic about buffer component[J].Noise and Vibration Control,2001(2): 18-21
[9]王東升.振動、沖擊環境下支架減振器剛度優化設計[J].航天器環境工程, 2006, 23(2): 86-89
Wang Dongsheng.Optimal design of bracket isolator stiffness in vibration and shock environment[J].Spacecraft Environment Engineering, 2006, 23(2):86-89
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
中國特種設備安全(2022年6期)2022-09-20 02:52:28
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
天天愛科學(2020年6期)2020-09-10 07:22:44
模具制造(2019年3期)2019-06-06 02:10:54
電子制作(2018年11期)2018-08-04 03:26:08
數學物理學報(2017年6期)2018-01-22 02:26:40
工業設計(2016年12期)2016-04-16 02:52:00
消費者報道(2014年7期)2014-07-31 11:23:57
