粒子拖尾長度對高頻DPIV測量誤差的影響
2011-06-15 01:27:24陳啟剛李丹勛王興奎
實驗流體力學 2011年6期
陳啟剛,李丹勛,鐘 強,王興奎
(清華大學水沙科學與水利水電工程國家重點實驗室,北京 100084)
粒子拖尾長度對高頻DPIV測量誤差的影響
陳啟剛,李丹勛,鐘 強,王興奎
(清華大學水沙科學與水利水電工程國家重點實驗室,北京 100084)
基于連續激光源的高采樣頻率DPIV系統在進行曝光時可能會產生粒子拖尾現象。明渠湍流試驗和數值模擬試驗結果顯示,粒子拖尾長度的增加會導致平均流速減小和湍流強度增大。分析表明,導致平均流速誤差的原因之一是診斷窗口邊緣局部粒子圖像的缺失,且圖像缺失程度會隨著粒子拖尾長度增加而增大,從而使平均速度隨粒子拖尾長度增加而減小;粒子拖尾的另一個直接后果是增大了粒子圖像的有效粒徑,從而導致湍流強度增大。通過增大第二個診斷窗口的尺寸,進行相關函數標準化和相關系數補償等方法,可以消除粒子拖尾長度引起的誤差。
PIV;拖尾長度;連續激光源;誤差;平均速度;湍流強度
0 引 言
PIV是一種無干擾全場測速技術,可以快速獲取瞬時二維或三維流速場。自20世紀80年代以來,隨著對示蹤粒子、光學設備、成像系統、速度提取算法等研究的不斷深入,傳統的PIV技術日趨成熟。
目前,標準的商用DPIV系統是以兩臺交錯工作的脈沖激光為光源,數字攝像機按雙幀單曝光模式拍攝示蹤粒子圖片,采用移動、變形或多重迭代的診斷窗口,基于快速傅里葉變換(FFT)對兩個診斷窗口進行互相關計算得到速度場,通過相關系數峰值亞像素擬合可以提高測量精度[1-3]。文獻中對基于脈沖光源PIV 系統的誤差分析全面而深入[4-11]。
在標準的商用DPIV系統中,粒子曝光時間等于脈沖持續時間,可以設置到ns量級,但受限于激光的脈沖頻率,其采樣頻率一般低于50Hz[12]。為了滿足對高頻湍流研究的需要,基于高頻率脈沖激光的TRPIV系統近年來得到了較快發展,但其價格昂貴且對同步設備要求極高,尚無法在明渠湍流研究領域推廣普及。提高DPIV采樣頻率的另一個重要途徑是采用連續激光代替脈沖激光[12-14]。在基于連續激光的DPIV系統中,采樣頻率由高速攝像機控制,但由于連續激光的強度低于脈沖激光,相機曝光時間(相機快門從打開到關閉的時間間隔)一般要長于脈沖激光源的脈沖持續時間。Sante等[15]在將基于連續激光的TR-PIV應用于旋轉槽道流的測量時,其相機曝光時間為200~300μs。
隨著曝光時間的增加,示蹤粒子在成像過程中會出現拖尾現象。這一現象早就引起了研究者的注意,例如Prasad[2]和 Adrian[3]在有關PIV 的綜述中對此就有所提及,最近Sante等[13]在將連續激光器應用于實際流動測量時,也注意到粒子會隨著曝光時間的增加而產生拖尾現象。但是,目前還未見有系統分析粒子拖尾長度對DPIV測量誤差影響的研究成果。
為深入研究粒子拖尾現象對DPIV測量精度造成的影響,首先應用基于連續激光源的高頻DPIV對同一明渠湍流時均速度和湍流強度進行測量,對比不同曝光時間(拖尾長度)下測量結果的差異;然后,采用蒙特-卡羅隨機模擬方法生成兩幀粒子圖像,分析拖尾長度對平均速度的影響;最后對粒子拖尾導致DPIV測量誤差的原因進行分析,并提出消除這種誤差的方法。
1 明渠湍流試驗
1.1 試驗條件
構建了基于連續激光源的高頻DPIV系統,在不同曝光時間條件下,對同一明渠均勻湍流進行測量,分析拖尾長度對時均流速和湍流強度測量精度的影響。
試驗水槽長11m、寬0.25m、高0.20m,可調坡降范圍為0~0.01,觀測段距上游進水口8m。PIV硬件系統由2W連續激光源、工業用高速攝像機和光學透鏡構成,相機CCD大小為640pixel×480pixel,采樣頻率604Hz。流場計算采用基于FFT的互相關算法;采用二重網格迭代模式進行計算,最大診斷窗口尺寸為64pixel×16pixel,最小診斷窗口尺寸為16pixel×4pixel;采用式(1)進行三點高斯亞像素擬合以確定相關系數峰值的位置。
在相同的水流條件下進行了4組試驗,相機分辨率Rs=54.2μm/pixel,水深2cm,坡降0.4%,垂線平均流速49.7cm/s,摩阻流速u*=2.6cm/s,雷諾數Re=8590。4組試驗的曝光時間Te分別為300、600、1000、1500μs。每組試驗均連續采集40000幀圖片進行統計計算。其中,在曝光時間為300μs時,基本上無拖尾現象,可以作為對比的標準。
1.2 試驗結果
定義拖尾長度L、平均流速Um、平均流速誤差Rb、湍流強度等參數如下:
其中,Ui為單次采樣得到的瞬時速度值,Ur為相同水流條件下300μs曝光時間(基本沒有拖尾影響)的平均流速。
圖1點繪了由(4)式計算的平均流速的誤差。從圖中可以看出,隨著曝光時間的增加,平均流速減小,即平均流速隨粒子拖尾長度的增加而減小;同時,近壁區速度梯度的存在進一步加劇了平均流速減小的幅度。

圖1 平均流速誤差沿水深的變化Fig.1 Mean-velocity error along water depth

圖4點繪了縱向湍流強度隨曝光時間的變化,從圖中可以看出,隨著曝光時間的增加,縱向湍流強度有增大的趨勢,這反映了粒子拖尾長度的影響。

圖2 平均流速誤差隨速度梯度的變化Fig.2 Mean-velocity error with respect to velocity gradient
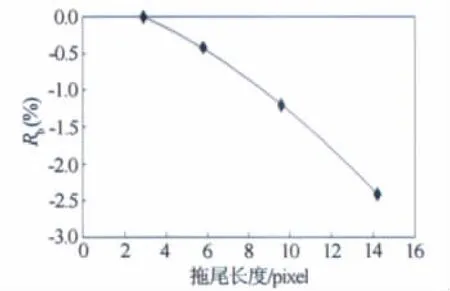
圖3 平均流速誤差隨拖尾長度的變化Fig.3 Mean-velocity error with respect to tailing length
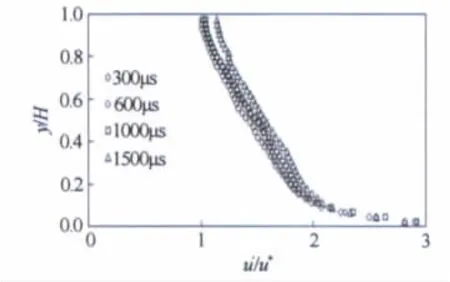
圖4 縱向湍流強度隨曝光時間的變化Fig.4 Streamwise turbulent intensity with respect to exposure time
2 數值模擬試驗
2.1 圖像生成
模擬均勻流場的情況。采用蒙特-卡羅模擬方法在400pixel×400pixel的圖片上隨機生成了一系列示蹤粒子作為第一幀粒子圖像(圖5(a)),其中每個示蹤粒子的大小為1個像素點;將第一幀圖像中的每個像素點從左往右平行移動相同的距離,即為第二幀粒子圖像,即每個診斷窗口均具有相同的縱向流速。為了模擬粒子的拖尾現象,只需在圖5(a)中每個粒子的右邊補充相同數量的粒子即可,圖5(b)給出了圖5(a)的粒子拖尾2個像素點后對應的圖像。
2.2 數值模擬結果
共分析了拖尾長度為0~9的7種情況。模擬得到各種拖尾長度的粒子圖像后,采用64pixel×64pixel的診斷窗口對粒子圖像進行相關計算,將每個流場中得到的流速矢量求平均后即得到各拖尾長度條件下的平均流速。選擇粒子無拖尾時的平均流速為參考流速Ur,用(4)式分別計算各拖尾長度條件下的平均流速與Ur的誤差,計算結果如圖6。
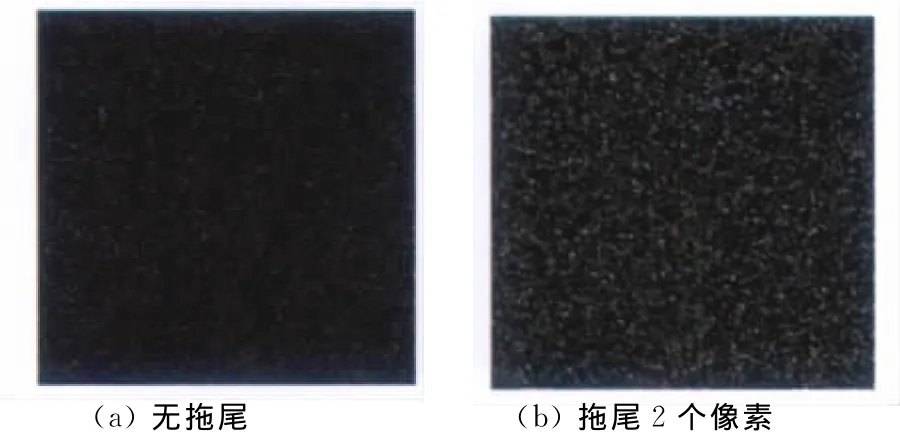
圖5 模擬粒子圖像Fig.5 Simulated particle images
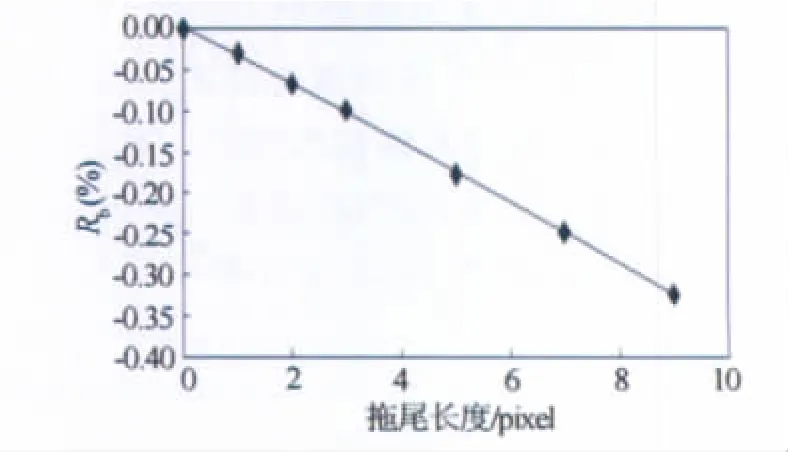
圖6 平均流速誤差的數值模擬結果Fig.6 Numerical simulation result of mean-velocity error
圖6的結果表明,平均流速測量誤差隨著拖尾長度的增加而逐漸增大,這與圖3中由試驗得出的結果是吻合的。雖然圖3和圖6中二者的變化趨勢是相同的,但在相同拖尾長度時,平均流速誤差的數值有差別,這可能是由于湍流脈動及試驗顆粒的三維運動特性等原因造成的,而基于簡化的二維模擬圖片進行PIV誤差分析時一般會低估實際誤差[9]。
3 誤差分析
3.1 平均流速誤差的原因
當粒子不發生拖尾時,經過8像素位移以后,第一個診斷窗口中離右邊框8像素范圍內的粒子將跑出第二個診斷窗口(如圖7)。當粒子發生拖尾時,以拖尾2個像素為例,相當于粒子水平方向的粒徑為原來的3倍,此時除了離右邊框8像素范圍內的粒子將跑出第二個診斷窗口以外,離右邊壁8~10像素距離范圍內的粒子圖像將部分跑出第二個診斷窗口,導致粒子圖像局部缺失(如圖8),這是導致平均流速產生誤差的原因之一。
為了驗證以上分析,采用2.1節中已經生成的粒子拖尾2像素的圖像進行計算,在計算之前,首先將第一幀診斷窗口中距離右邊框10像素范圍的粒子全部剔除,然后再與第二幀圖片中相同位置的診斷窗口進行基于FFT的互相關運算。經過以上處理以后,可以保證粒子在拖尾長度不超過2像素時,第一幀診斷窗口中距離右邊框大于8像素范圍內的所有粒子圖像均能完整的出現在位移8像素后的第二幀診斷窗口中,不致產生粒子圖像的局部缺失。圖9點繪了經過以上處理后得到的平均流速誤差隨粒子拖尾長度的變化趨勢。
對比圖6與圖9可以發現,剔除距離右邊框10像素范圍內的示蹤粒子后,當拖尾長度不超過2像素時,粒子拖尾不會導致平均流速誤差。當拖尾長度超過2像素后,平均流速之所以再次產生誤差,是因為距離右邊框大于10像素的部分粒子又會產生圖像的局部缺失。實際上,即使粒子不發生拖尾現象,當粒子圖像的粒徑大于1個像素時,也會因為診斷窗口右邊緣的粒子圖像局部缺失而導致平均流速誤差。
如圖10所示,當粒子圖像均保持完整時,在將第一幀診斷窗口相對第二幀診斷窗口進行移動相關的過程中,由于實際位移點左右兩側的有效圖像信息完全對稱,FFT計算得到的最大相關點及其左右兩個次最大相關點分布在以實際位移點為峰值的高斯曲線上,因此,按(1)式進行亞像素擬合不會使相關系數峰值偏離實際位移。當粒子圖像存在局部缺失現象時,實際位移點左側的圖像信息量不變,而實際位移點右側的有效圖像信息量將會減少,這使得FFT計算得到的實際位移點右側的相關系數偏小,亞像素擬合得到的相關系數峰值位置將偏向實際位移點的左側,這是導致平均流速減小的原因。當粒子拖尾長度增加時,第二幀診斷窗口邊緣缺失的圖像信息量會增大,這是使得平均流速誤差隨拖尾長度增大而增大的原因。
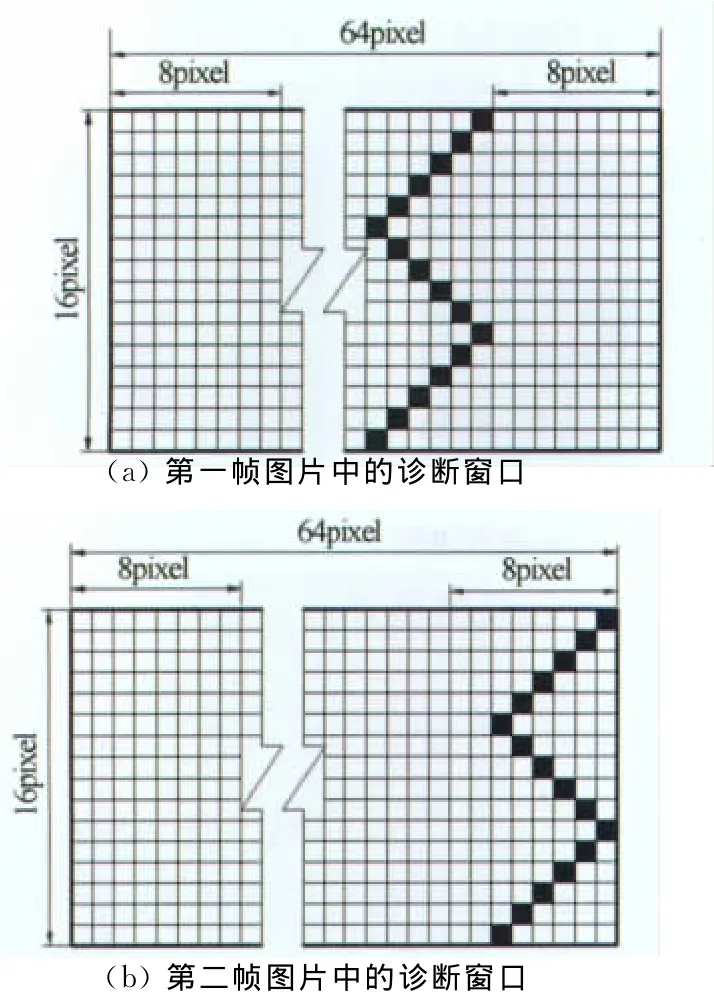
圖7 無拖尾時粒子位移前后示意圖Fig.7 Schematic diagrams of particles moving without tailing
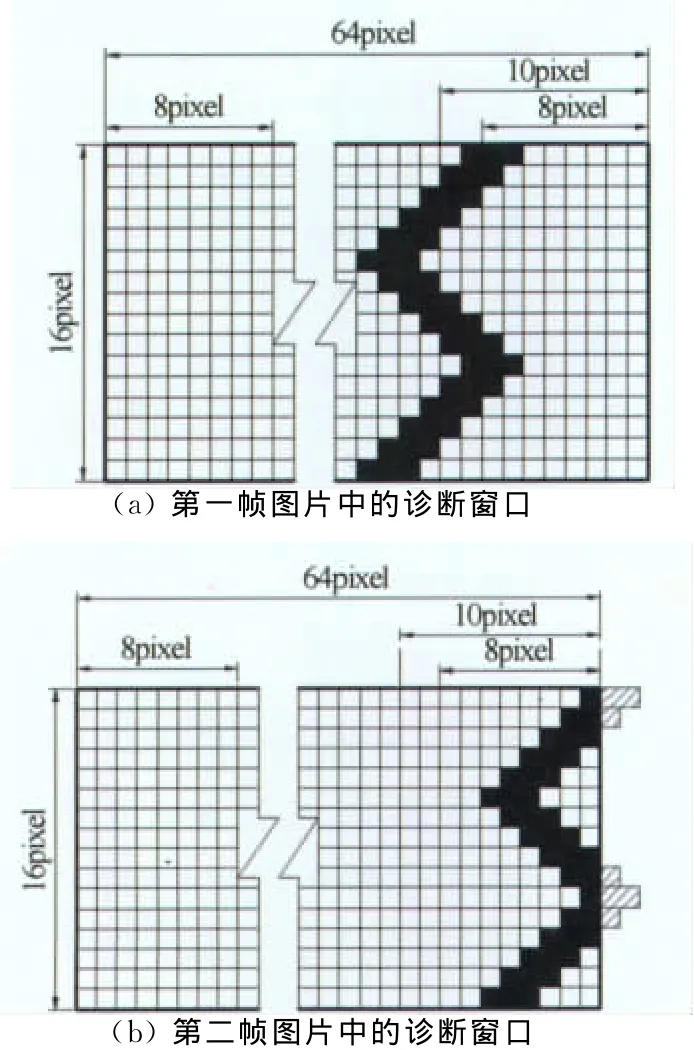
圖8 拖尾2像素時粒子位移前后示意圖Fig.8 Schematic diagrams of particles moving with two pixels'tailing
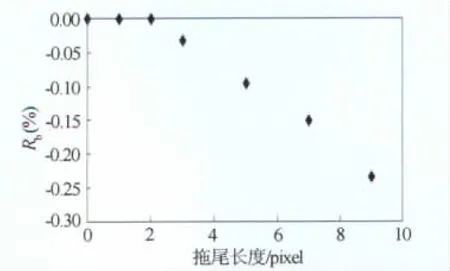
圖9 剔除粒子后拖尾長度與平均流速誤差的關系Fig.9 Relationship between mean-velocity error and tailing length after eliminating particles near the boundary
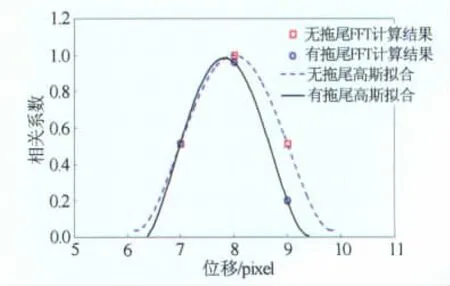
圖10 基于FFT計算結果的高斯亞像素擬合示意圖Fig.10 Schematic diagrams of Gaussian sub-pixel fit based on the result of FFT calculation
3.2 湍流強度誤差產生的原因
根據 Adrain[16],Willert[17],Westerweel[6]等的研究,當粒子粒徑大于2個像素后,計算得到的湍流強度會隨著粒子半徑的增大而增大。這是由于當粒子粒徑增大時,FFT計算得到的相關系數峰值會變寬,在進行亞像素擬合時,相關系數峰值位置的波動幅度會增大,從而導致湍流強度增大。當示蹤粒子出現拖尾時,等價于增大了粒子的有效粒徑,因此,試驗得到的湍流強度會呈現隨拖尾長度的增大而增加的趨勢。
3.3 消除誤差的方法
上述分析表明,當粒子圖像出現拖尾現象時,平均速度產生誤差是由于第二個診斷窗口右邊框附近的粒子圖像局部缺失引起的;而拖尾導致湍流強度增大的原因在于增大了粒子的有效粒徑。Anandarajah等[10]的研究表明,在進行互相關計算時,可以增大第二個診斷窗口的尺寸,使得第一個診斷窗口中的所有粒子均能完整的出現在第二個診斷窗口中,從而消除粒子圖像局部缺失引起的平均流速誤差。Huang等[7]的研究則發現,對相關函數進行標準化和對相關系數峰值附件的像素點處的相關系數進行補償后,湍流強度將不再隨粒徑變化。
基于以上研究成果,可以通過以下方法消除粒子拖尾引起的DPIV測量誤差。首先,采用大小不同的診斷窗口I1和I2(I2>I1),按(6)式對互相關函數進行標準化后進行相關運算:

其中A是第一和第二幀診斷窗口在移動相關過程中的重疊區域。計算得到各整像素點處的相關系數后,設R(xi,yi)為像素點相關系數峰值,R(xk,yk)∈{R(xi+1,yi),R(xi-1,yi),R(xi,yi+1,R(xi,yi-1)}是R(xi,yi)周圍用于亞像素擬合的四個相鄰像素點的相關系數。采用(7)式對R(xk,yk)進行補償后,再按照(1)式進行亞像素擬合,即可消除粒子拖尾引起的DPIV測量誤差。
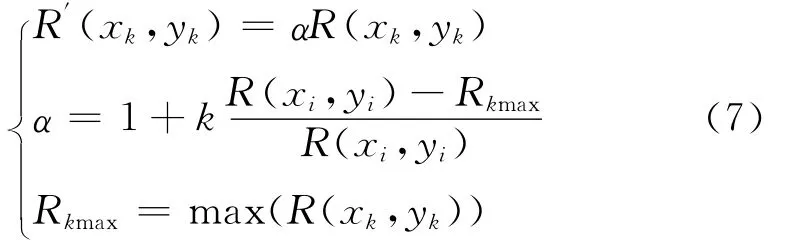
其中,k(0<k<1)為補償系數。
4 結 論
對湍流等復雜流動的研究推動了基于連續激光源的高頻DPIV系統的研發和推廣,這種系統在對粒子圖像進行曝光時可能會產生粒子拖尾現象。明渠湍流試驗和數值模擬試驗表明,隨著粒子拖尾長度的增加,計算得到的平均速度會減小,而湍流強度則會增大。
由于診斷窗口邊緣附近的粒子圖像局部缺失,使得FFT計算的實際位移點及其右側的相關系數偏小,最終導致高斯擬合后的相關系數峰值位置偏向左側,從而使得計算得到的平均流速偏小,而粒子拖尾本身不會直接導致平均速度誤差。當粒子拖尾長度增加時,圖像局部缺失程度增加,FFT計算結果的不對稱性加大,使得平均流速隨拖尾長度的增大而減小。
粒子發生拖尾時,實際上相當于增大了粒子的有效粒徑,等效粒徑的增大是導致計算湍流強度增大的原因。
通過增大第二個診斷窗口,對相關函數進行標準化以及對相關系數峰值附近像素點處的相關系數進行補償,可以避免平均速度誤差的產生,也可使得湍流強度不隨粒子粒徑的增大而增加,從而消除拖尾長度對PIV測量誤差的影響。因此,將基于連續激光源的高頻DPIV系統應用于實際流動的測量是可行的。
[1]WILLERT C E,GHARIB M.Digital particle image velocimetry[J].Experiments in Fluids.1991,10(4):181-193.
[2]PRASAD A K.Particle image velocimetry[J].Current Science,2000,79(1):51-60.
[3]ADRIAN R J.Twenty years of particle image velocimetry[J].Experiments in Fluids,2005,39(2):159.
[4]GUEZENNEC Y G,KIRITSIS N.Statistical investigation of errors in particle image velocimetry[J].Experiments in Fluids,1990,10(2-3):138-146.
[5]KEANE R D,ADRIAN R J.Theory of cross-correlation analysis of PIV images[J].Applied Scientific Research,1992,49(3):191-215.
[6]WESTERWEEL J.Fundamentals of digital particle image velocimetry[J].Measurement Science & Technology,1997,8(12):1379-1392.
[7]HUANG H,DABIRI D,GHARIB M.On errors of digital particle image velocimetry[J].Measurement Science & Technology,1997,8(12):1427-1440.
[8]FORLITI D J,STRYKOWSKI P J,DEBATIN K.Bias and precision errors of digital particle image velocimetry[J].Experiments in Fluids,2000,28(5):436-447.
[9]WESTERWEEL J.Theoretical analysis of the measurement precision in particle image velocimetry[J].Experiments in Fluids,2000,29(Supplement 1):S3-S12.
[10]ANANDARAJAH K,HARGRAVE G K,HALLIWELL N A.Digital particle image velocimetry:particle image error(PIE)[J].Journal of Physics:Conference Series,2006,45(1):174-185.
[11]CARR Z R,AHMED K A,FORLITI D J.Spatially correlated precision error in digital particle image velocimetry measurement of turbulent flow[J].Experiments in Fluids,2009,47(1):95-106.
[12]王龍,李丹勛,王興奎.高幀頻明渠湍流粒子圖像測速系統的研制與應用[J].水利學報,2008,39(7):781-787.
[13]DI Sante A,THEUNISSEN R,VAN den Braembussche R A.A new facility for time-resolved PIV measurements in rotating channels[J].Experiments in Fluids,2008,44(2):179-188.
[14]余俊,萬津津,施鎏鎏,等.基于連續式激光光源的TR-PIV測試技術[J].上海交通大學學報,2009,(8):1254-1257.
[15]SANTE A D,CASTANO J G,BRAEMBUSSCHE R A V.Time resolved PIV in a rotating diverging channel:13th Int Symp on Application of Laser Techniques to Fluid Mechanics[Z].Lisbon:2006.
[16]ADRIAN R J.Particle-imaging techniques for experimental fluids mechanics[J].Annual Review of Fluid Mechanics,1991,23(1):261-304.
[17]WILLERT C.The fully digital evaluation of photographic PIV recordings[J].Applied Scientific Research,1996,56(2-3):79-102.
陳啟剛(1987-),漢族、四川宜賓人,博士研究生,主要從事明渠湍流和泥沙運動試驗研究。通訊地址:北京市海淀區清華大學水利系泥沙研究所(100084);聯系電話:15120001870;E-mail:cqg09@ mails.tsinghua.edu.cn
Bias error induced by particle tailing in DPIV measurement
CHEN Qi-gang,LI Dan-xun,ZHONG Qiang,WANG Xing-kui
(State Key Laboratory of Hydroscience and Engineering,Tsinghua University,Beijing 100084,China)
The presence of particle tailing affects the performance of DPIV systems that use continuous wave laser as light source.Open-channel flow experiments and numerical stimulations show that the measured mean velocity of the flow decreases and the turbulent intensity increases when the exposure time prolongs.Underestimation of the mean velocity is due to the fact that the existence of particle tailing aggravates the partial lost of particle images near the boundary of the interrogation windows.Overestimation of the turbulent intensity is caused by the enlargement of the seeding particles due to particle tailing.An algorithm was proposed to eliminate or reduce these errors by enlargement of the second interrogation window,normalization of correlation function and complementation for integer peak neighbors.
particle image velocimetry;particle tailing;continuous wave laser;error;mean velocity;turbulent intensity
O352
A
1672-9897(2011)06-0077-06
2010-11-24;
2011-08-12
國家自然科學基金(50779023)
