起重機自激動力制動交流調速系統工程計算與設計
2011-06-22 07:17:58鄭世靜
電氣技術 2011年11期
關鍵詞:機械
鄭世靜
(天水長城控制電器有限責任公司,甘肅 天水 741018)
近些年隨著變頻技術的發展,矢量控制、直接轉矩控制技術的出現,使位能性負載使用變頻調速控制方式成為現實,由于其優良的調速性能,被廣泛地應用于起重機的控制系統中。但變頻調速系統相對成本較高,維護及維修、備品備件的價格常常受制于制造商,系統對運行環境和操作維護都有較高的要求,在起重機行業推廣應用受到一定限制。這里介紹一種可靠實用的交流調速控制方式——自激動力制動調速方式,這種調速方式能獲得穩定的中、低速,過載倍數達到3倍,調速范圍可達1:5以上,而且線路簡單、成本低、節能、易于維護,適合于有調速要求,安裝用橋式起重機上使用,尤其是電站用起重機。在系統設計和實際工程計算中,相對于他激系統,由于存在定、轉子的電磁聯系,使得系統機械特性和轉子側電阻等關鍵參數的工程計算比較困難,需按自激狀態下通過多次等效變換進行計算求取。
1 原理簡述
系統主線路如圖1所示,先在異步電動機兩相定子通以額定電流 3%~5%的直流電流,形成初勵磁電流,利用負載自拉下降時,轉子所產生的感應電流經三相整流供給定子繞組(此時通過連鎖切斷初勵)而產生制動力矩,最終制動力矩與電機負載力矩達到平衡,電動機的轉子電流,送人定子繞組的自激電流及電動機轉速保持不變,電動機在自激動力制動狀態下穩定運行。當改變轉子電阻值時,會引起轉子電流、自激電流的變化,從而引起制動轉矩的變化,最終使電動機的轉速發生變化。由于激磁電流自動的由電動機負載來調節,在負載變化較大的情況下,其速度變化范圍很小,機械特性曲線平行移動,所以有較大的過載能力。

圖1 自激動力制動主電路
2 機械特性計算
由于在自激動力制動狀態下電動機定子電流是由轉子感應電流經整流后送入定子繞組的,所以定子與轉子之間不僅有磁路聯系,還有電路聯系,機械特性計算要按照等效電流、等效磁勢的基本原則[1]推算。
依照異步電動機T型等值電路(圖2)及電流相量圖(圖3),相對轉速表達式及轉矩表達式分別為
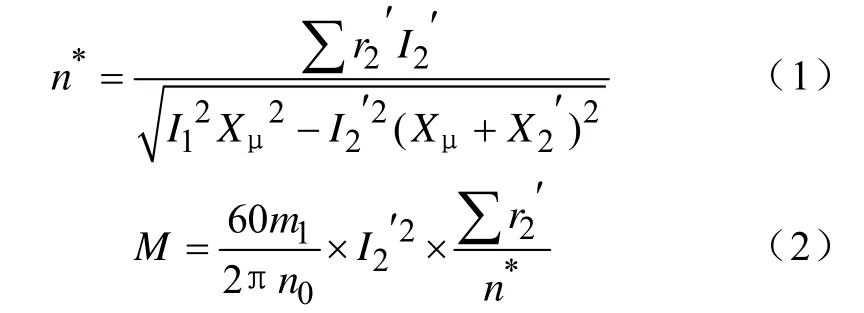

圖2 異步電動機T型等值電路

圖3 動力制動電流相量圖
2.1 I1的推算
先將轉子整流到定子的直流電流產生的不對稱勵磁電流系統用磁勢幅值與它等效的對稱三相交流電流系統來代替,按本線路的接線方法,定子通以直流的方式如圖4,則有

令KZS=0.816為磁勢等效系數/
則I1=KZSIZ
可將圖1主線路圖等效為圖5,則得


圖4 定子接線圖
將上式代入式(1)可得

KF為分流系數[見式(5)]; Ke為電壓變比;K Z L = 0 .816為三相橋整流系數。
將各值代入上式I1可近視為下式:

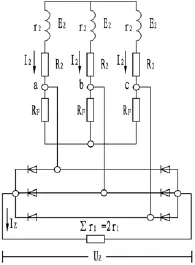
圖5 主電路等效電路一
2.2 ∑ r2 ′的推算
在自激狀態下,定子回路對轉子參數有一定的影響,需將定子回路等效到轉子邊來,圖5的等效電路可等效為圖 6,等效是基于 a、b、c三點電位不變的原則,這樣定子回路對轉子的影響就可由等效電阻r1s來代替。
由圖6可得

由圖5可得

KZU為三相橋電壓系數
由上式可得

轉子每相分壓點a、b、c以下的電阻為RF和r1s并聯,用RFS表示,則 R F S = RF//r1s。
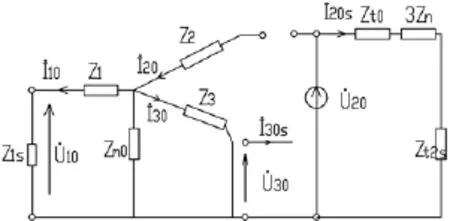
圖6 主電路等效電路二
轉子回路折算到定子側的電阻就可由下式計算

由圖6又可得出

2.3 Xμ的推算

式中, Eφ1為某一激磁電流時的激磁電勢, Eφe為額定的激磁電勢,Iμ為磁化電流,I0為額定磁化電流。

由T型等值電路及式(1)可得出計算Xμ的相對表達式

3 結論
本文所述機械特性計算方法,通過等值變換將定、轉子電氣參數進行了解耦,曾以22kW的YZR-225M-8電動機為研究對象,進行了理論計算值與實測值的比較(見圖7)。排除負載與力矩折算誤差,計算值與實測值基本相符,驗證了該方法的正確性,此計算方法能滿足工程設計的需要。

圖7 下降自激動力制動狀態下各檔機械特性
在系統設計和實際工程計算中,轉子側電阻∑r′的工程計算由于存在定、轉子的電磁聯系,需要在自激狀態下通過多次等效變換進行計算求取。本文給出的∑r′計算方法,從理論上解決了轉子側電阻的精確計算問題,從而確保了系統的調速性能,在水電站的 200T橋式起重機上,分別控制起升機構雙電機,吊裝定、轉子,尤其在轉子安裝到定子的過程中,各檔速度平穩,低速特性良好,在重型機械廠、軋鋼廠等同類起重機上得到成功運用,驗證了計算方法的正確性,具有較強的理論指導和工程應用價值。
[1]顧繩谷.電機與拖動基礎[M].北京:機械工業出版社,2007.
[2]阿列克謝耶夫等(蘇).起重機電氣設備手冊[M].北京:機械工業出版社.
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09