基于BP算法的AT牽引供電系統狀態識別
2011-06-27 05:11:40董菲,金鈞
電氣化鐵道 2011年6期
董 菲,金 鈞
0 引言
AT牽引供電系統是一種較為復雜的供電系統,而快速準確地識別該系統的各種故障是高速鐵路安全運行的保障。
AT牽引供電系統可以采取多種仿真軟件進行仿真,譬如,PSCAD仿真軟件[1]、MATLAB仿真軟件[2,3]等。文獻[4]建立了整個牽引供電系統包括變電站、自耦變壓器、多導體傳輸線的模型,把牽引網模型建成去耦合后的電路網絡。文獻[5]在低頻領域把牽引供電系統作為標準配電系統建立數學模型,在負載、穩態電壓、諧波仿真方面有一定參考價值。文獻[6]建立了多導體模式下的AC供電模型,并利用該模型開發了用于求解列車電流、電壓的仿真系統。文獻[7]以計算列車受電電壓為目標,建立了牽引供電系統仿真模型,利用較好的計算手段(如牛頓迭代法)進行仿真,在AT所間距設計、行車計劃等方面有一定幫助。文獻[8]、[9]對電力系統中故障識別手段進行分析,文獻[10]對神經網絡應用于電氣化鐵道展開論述,因此可比照電力系統把人工神經網絡應用于AT牽引供電系統的故障識別。ATP電磁暫態仿真軟件之前已應用于電力系統中,因此也可以應用于AT牽引供電系統。
本文采用ATP電磁暫態仿真軟件對AT牽引供電系統進行仿真分析,用BP算法對牽引供電系統的正常狀態、T-R短路故障、F-R短路故障、T-F短路故障(T為接觸線、F為正饋線、R為鋼軌)、異相短路故障等5種狀態進行識別。
1 原理分析和建立單供電臂仿真模型
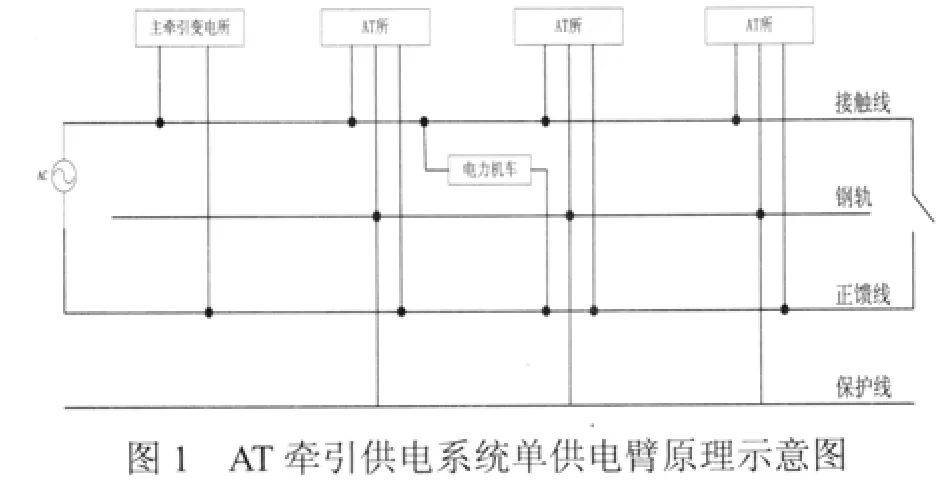
AT牽引供電系統主要包括主牽引變電所、AT所、接觸線、正饋線、保護線、放電器、大地等。主牽引變電所主要是將電力系統的三相交流電壓110 kV轉變為單相55 kV交流電壓。AT所主要是由自耦變壓器構成,該變壓器兩端分別接接觸線和正饋線,中性點連接放電器,放電器接鋼軌。接觸線和正饋線的電流是一對大小基本相等、方向相反的電流,因此對相鄰線路的通信信號影響較小。保護線與鋼軌并聯,通過橫連接線實現鋼軌、自耦變壓器的中性點、保護線的連接。保護線的主要作用:提高信號軌道的工作可靠性;在發生短路故障時,能夠為短路電流提供良好的金屬通路,利于繼電保護準確的動作。一般情況時,保護線可以有效分流,降低鋼軌電壓。本文采用LJ-185型保護線[11]。AT牽引供電系統的單供電臂原理如圖1所示。
ATP是一款強大的仿真軟件,主要是針對復雜系統的電磁暫態分析。但由于 ATP仿真軟件并非針對鐵路牽引供電系統開發的軟件,所以需要對相關的器件進行改造。主牽引變壓器的電能來自對稱的并且是穩定的電源,所以可以用55 kV的單相交流電源(相位為零)代替。AT所主要是由自耦變壓器構成,變壓器原邊的負極接次邊的正極,使其構成中性點連接放電器接地。自耦變壓器的電感為L=200 mH,磁阻為2650 Ω,在AT牽引供電系統中每隔10 km設置一個自耦變壓器。放電器的電阻設為0.02 Ω。高速動車組一般被認為是單相非線性器件,但是在運行中動車組是一個效率接近于1的機器,所以在建立AT牽引供電系統中相當于一個71 Ω的純電阻。牽引供電系統的線路阻抗是較小的,表1是鐵道設計部門給出的牽引網阻抗表。

表1 牽引網線路阻抗 單位:Ω/km
由于AT牽引供電系統是對稱的,故只需分析雙供電臂中的單供電臂即可。圖2是ATP仿真軟件建立的AT牽引供電系統的單供電臂仿真模型。
2 AT牽引供電系統5種狀態仿真分析
針對利用ATP仿真軟件建立的單供電臂模型,本文主要對T-R、F-R、T-F、異相短路故障進行分析。T-R、F-R、T-F短路故障分別是在圖2的基礎上加裝短路開關和一個小電阻構成短路。短路開關設置的閉合時間為0 s,斷開時間為0.1 s。前3種故障的接觸線電流和鋼軌電流全部是靠近主牽引變電所測量的電流量。以上3種短路故障短路期間(0.1 s)內接觸網的接觸線短路電流較大,與高速動車組正常狀態有較大的區別,同時對鋼軌電流和機車取流影響較大。
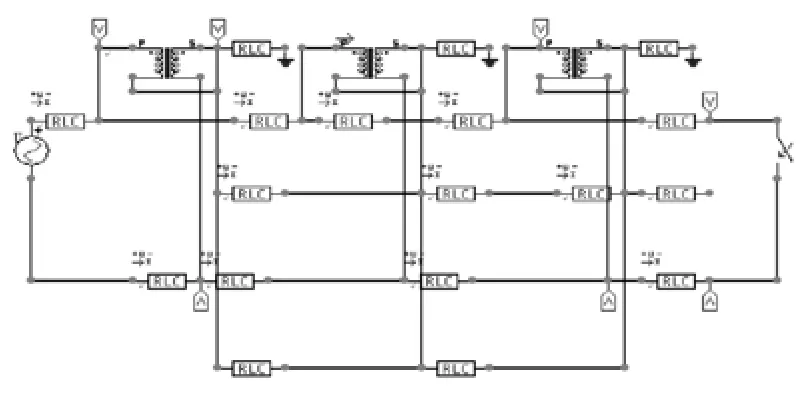
圖2 AT牽引供電系統單供電臂仿真模型圖
針對300 km/h的高速動車組過電分相時會產生非線性諧振(鐵磁諧振)和線性諧振,并且有較大的接觸網的接觸線短路電流,鋼軌電流量會有明顯的暫態過程。異相短路故障是電氣化鐵道中較為特殊的故障,有必要進行重點分析。圖3—圖5是異相短路故障的仿真波形。
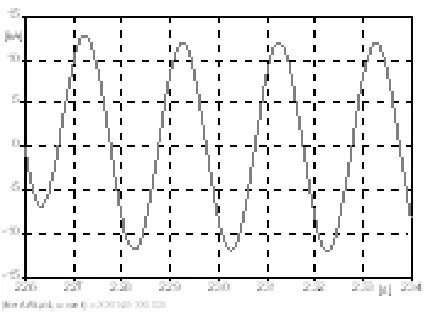
圖3 接觸網的接觸線短路電流仿真圖
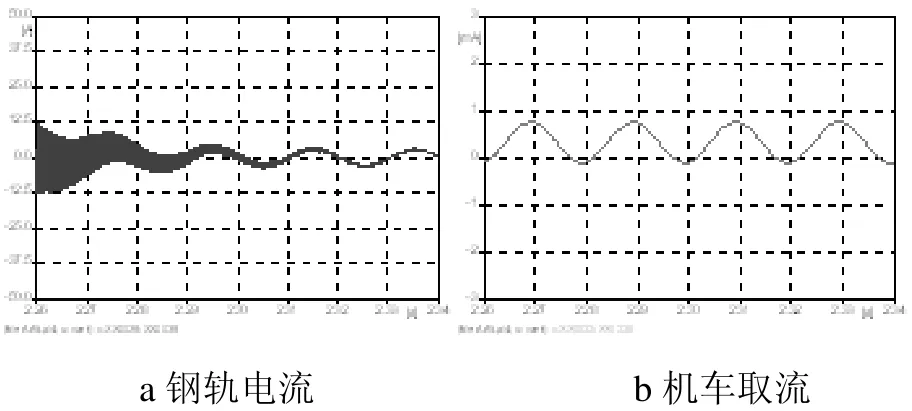
圖4 中性區段仿真圖
異相短路故障中出現諧振,主要是機車高壓電壓互感器和中性區段中性線對地等效電容發生諧振。從圖3—圖5的3個仿真波形圖可以看出,接觸網的接觸線短路電流較大;鋼軌電流發生諧振,但經過60 ms后達到穩定狀態屬于暫態過程;機車取流較小,高速動車組受電弓裝置的等效阻抗很大。限于篇幅,表2僅列出了AT牽引供電系統的5種狀態的仿真數據。
分析表2中的仿真數據,可以得出發生短路故障時,短路電流是正常電流幾倍甚至幾十倍,這樣會對牽引供電系統造成很大的破壞,對于高速鐵路的運營十分不利。

表2 AT牽引供電系統5種狀態的仿真數據表 單位:A
3 基于BP算法的神經網絡故障識別
人工神經網絡具有非線性適應性信息處理能力,神經網絡中有多種算法可以解決故障識別問題,其中 BP算法得到較為廣泛的應用。BP學習算法的基本原理就是梯度最速下降法,中心思想是調整權值使網絡的總誤差最小,就是實際的輸出值與期望的輸出值的誤差均方值為最小。BP算法的主要優點:首先,只要有足夠的隱含層和隱節點,BP網絡可以逼近任意的非線性映射關系;其次,BP網絡是一種全局逼近的方法,因此有較好的泛化能力。缺點:收斂速度慢;局部極值;難以確定隱含層和隱節點的數目。BP網絡能夠實現輸入和輸出的非線性映射關系,但不依賴于模型,即使個別神經元的損壞對輸入輸出的影響較小,說明該算法的容錯能力較好。故此,神經網絡為解決故障診斷提供了一種新的途徑[12]。
神經網絡的故障診斷方法所需步驟:(1)對5種狀態進行仿真得出各故障的數據參數。(2)提取各個參數,并對其進行分析。(3)根據輸入數據的特點和系統所需數據輸出的要求,確定輸入層和輸出層的節點數,以及隱含層的節點數。(4)將預處理的數據和矢量參數輸入到網絡中,進行訓練,訓練成功后,將預先設定的信號和訓練結果進行比較驗證結果。
本文第2節已經對AT牽引供電系統出現的幾種故障進行了仿真,并提取數據參數進行了分析,總結出一張仿真數據表如表 2,故步驟(1)和步驟(2)已在第2節完成。對于步驟(3),確定接觸線的電流及增量、正饋線的電流及增量、鋼軌的電流及增量和流過電力機車的電流共 7個變量作為輸入數據;線路的 5種狀態作為輸出,現假設0000-0100代表5種預期輸出狀態。隱含層節點數太多會導致學習時間過長;而隱含層節點數太少容錯性差、識別未經學習的樣本能力低,所以必須綜合多方面的因素進行設計。隱含層的節點數一般根據經驗確定,經過大量實驗,本文的隱含層節點數確定為 12。步驟(4),對各個變量進行反復訓練并且必須收斂;如果對前面的仿真數據用BP算法計算,能夠得出實際與預期相近的值,可以證明文中所述的5種狀態被識別。
在應用BP算法進行狀態識別前需對仿真數據進行處理。大多數BP神經網絡模型以S形函數作為轉換函數,該函數的值域為[0,1],因此在網絡訓練時要將原始數據規范到[0,1]區間,通常采用標準的歸一化的方法來實現。對以上5種狀態總結的數據進行歸一化處理,就是將數據處理在0到1的范圍即可。
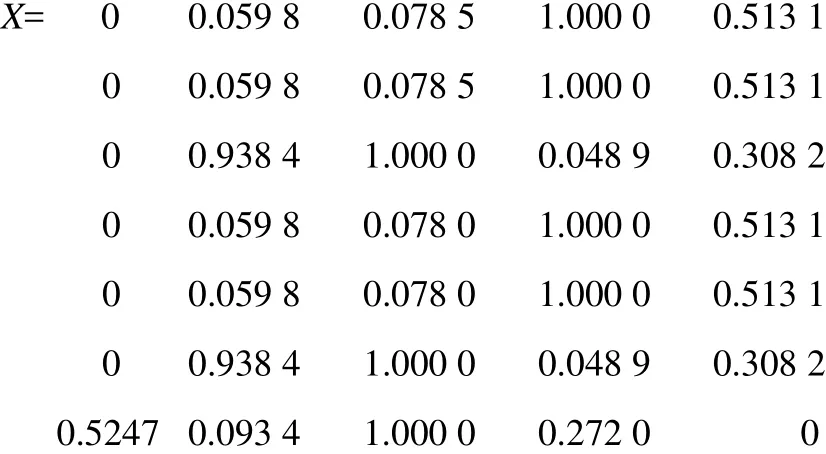
該X值是對表2中5種狀態仿真的數據進行歸一化處理的結果,之后才可用神經網絡的BP算法對AT牽引供電系統的5種狀態進行仿真研究。
結合圖6,可見經過10次訓練后,BP算法收斂并且保證能夠正確的預測。圖6中的橫線表示目標曲線,曲線表示訓練曲線,最下面的橫坐標表示訓練步驟,最上面的橫坐標表示訓練精度。縱坐標表示訓練曲線和目標曲線。
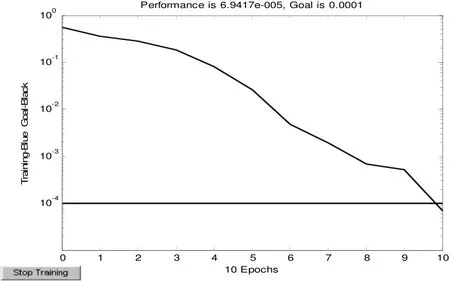
圖6 訓練誤差曲線圖
經過程序運行得出結果用y1表示,BP算法經過反復訓練先前的樣本(表2的仿真數據)得出應用神經網絡的BP算法對AT牽引供電系統的5種狀態識別的結果。
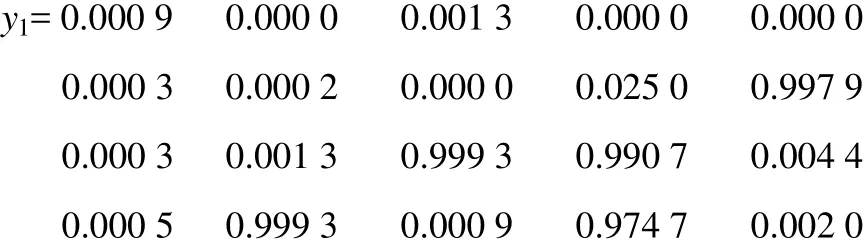
對比實際輸出y1和期望輸出相吻合,近似于0的數記為0,近似于1的記為1。得出最后的結果后,要與預先設定狀態相比較,若 y1和表 3的結果相對應就可判斷,狀態識別得到較好的驗證。
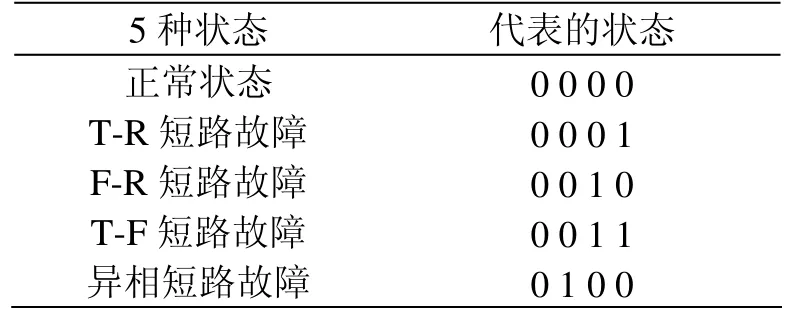
表3 預期狀態表
4 結束語
通過對AT牽引供電系統的5種狀態的仿真分析和狀態識別,得到良好的驗證;對異相短路故障的暫態過程進行了重點分析。由于篇幅所限,未對異相短路故障的暫態過程進行抑制諧振過電壓的分析。針對本文所研究的問題總結如下:
(1)建立了 AT牽引供電系統的物理模型和仿真模型,并對其AT牽引供電系統進行了理論分析和對AT牽引供電系統單供電臂的仿真模型中的主要部分進行參數設置。
(2)針對動車組運行在 AT牽引供電系統中發生的5種狀態,正常狀態、T-R短路故障、F-R短路故障、T-F短路故障、異相短路故障,應用ATP電磁暫態仿真軟件進行仿真分析。
(3)對神經網絡理論的 BP算法進行了簡要的闡述,并且提出應用BP算法對其5種狀態進行識別的步驟。
(4)應用 MATLAB仿真軟件中神經網絡的BP算法對其5種狀態進行智能識別,并且得到了較好的仿真驗證。
[1]張小瑜,吳俊勇.基于PSCAD的牽引供電系統仿真研究[J].電氣化鐵道,2007,(6):17-20.
[2]楊嶸春,粟蓮,隆超,等.數字化鐵道客運專線AT供電系統空載建模與仿真[J].電氣技術,2009,(1).
[3]方雷,何正友.高速鐵路牽引供電系統數字建模及仿真[D].成都:西南交通大學,2010.
[4]Tsai-Hsiang Chen, Yen-Feng Hsu. Systematized shortcircuit analysis of a 225 kV electric action network. Electric Power Systems Research,1998(47):133-142.
[5]鄧云川,高宏,楚振宇.高速列車負荷特征及其對牽引供電系統的影響[J].電氣化鐵道,2005,(6):6-10.
[6]劉海東,何天健,毛保華,等.多導體模式下的交流牽引供電仿真系統的研究[J].系統仿真學報,2004,(2):117-125.
[7]R.J.Hill and I.H.Cevik. On-1ine simulation of autotransformer-fed AC electric railroad traction networks,IEEE Trams. Veh. Technol, vol. 42, no.3, pp.365 -372,May.1993.
[8]劉一江,周友慶.應用人工神經元網絡方法實現微機距離保護[J].中國電機工程報,1999,19(12):51-56.
[9]顧雪平,張文勘,高曙,等.人工神經網絡和專家系統結合運用的電力系統故障診斷方法[J].華北電力學院學報,1994,(2):12-17.
[10]陳維榮,錢清泉,王曉茹.神經網絡在繼電保護及故障診斷中的應用[J].電力系統自動化,1997,21(5):5-9.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41
核科學與工程(2015年4期)2015-09-26 11:59:03
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34