全自動電池箱更換設備定位技術研究
2011-07-12 02:56:18趙明宇路致遠王國梁
制造業自動化 2011年18期
趙明宇,路致遠,王國梁
(國網電力科學研究院,南京 210061)
0 引言
電動汽車已成為未來汽車工業發展的方向,它主要有整車充電與電池更換兩種能量供給方式,采用電池更換模式可大幅減少電動汽車的電能補給時間,同時有利于提高動力電池利用效率及使用壽命,正得到越來越多研究人員的關注。在電池更換模式中,由于電動汽車停靠位姿的誤差以及不同電池箱在車身上的位姿變形誤差等因素,全自動電池箱更換設備對電池箱位姿的自動精確定位是首先要解決的難題。
為了減小機器人定位誤差,國內外學者提出了多種方法。密歇根大學機器人實驗室Borenstein和Feng兩人提出的UMBmark校核算法對測程法的系統誤差進行了研究[1,2]。Lionis和Walthelm等人從離散的激光掃描數據中提取線段特征來定位機器人[3,4]。Hashem等人則采用序列Monte Carlo定位算法實現機器人的自定位[5]。在國內,上海交通大學自主機器人研究組基于FRONTIER-I自主移動機器人平臺,提出了基于單向[6]、全景視覺[7]等移動機器人的自定位算法。文獻[8]基于激光和視覺傳感器模型的不同,分別采用加權最小二乘擬合方法和非局部最大抑制算法來提取二維水平環節特征和垂直物體邊緣,以完成高精度定位過程。文獻[9]在UMBmark校核算法的基礎上定義了測程法系統誤差模型以及其算法來提高定位精度。本文通過對電動汽車電池箱位姿的綜合誤差進行分析,基于多傳感器融合技術,對全自動電池箱更換設備的定位技術展開了研究。
1 定位對象分析
1.1 輔助定位停車
無論采用何種定位技術及算法,電動汽車需停在電池更換設備可操作的行程范圍內。因此,應使用車輛導引裝置輔助電動汽車停至規定位置范圍內,完成車輛導引、定位和固定功能。
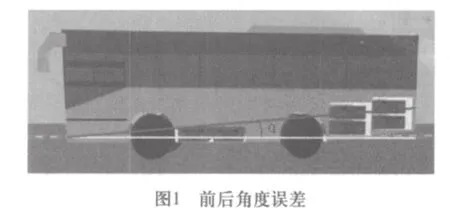
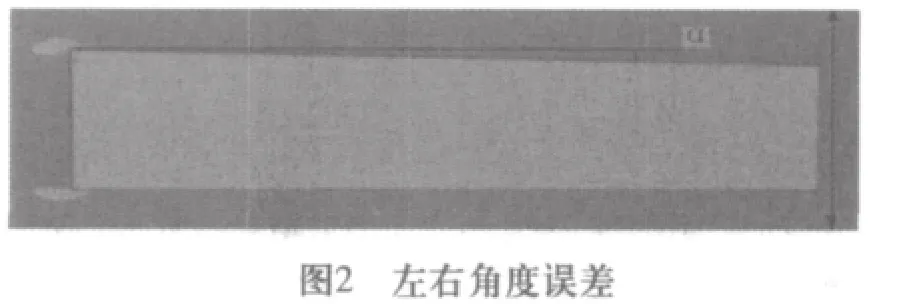
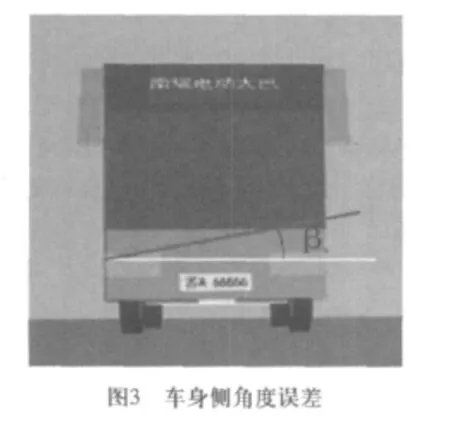
1.2 車身位姿誤差
電動汽車通過車輛導引裝置停泊后,其車身空間位姿仍然會有較大誤差,包括車身空間坐標及相應偏轉角度,如圖1 圖3所示。
1.3 電池箱位姿誤差
理論上,電池箱在車身上相對位置固定,定位到電動汽車位姿,即可定位到電池箱位姿。但事實并非如此,車架在焊接加工以及車輛運行過程中產生的累積誤差,可多達20-30mm左右,對應到電池箱上變形也較為可觀。此外,車身不同位置電池箱的誤差也不盡相同,因此,電池箱更換設備在對整車位姿進行過定位分析后,仍需對每個電池箱位姿進行單獨定位。
2 定位原理
2.1 概述
根據以上對電動汽車位姿誤差的分析,本文提出以下基于視覺傳感器和激光傳感器的多重定位技術步驟來解決電池箱更換設備對車輛的全局定位和局部定位:
1)車輛初定位
借助車輛導引裝置輔助車輛初步定位,將電動汽車停靠在預定的電池箱更換設備操作行程范圍內。
2)矩形目標全局粗定位
矩形目標安裝在車身固定位置上。從某種意義上說,矩形目標的位姿即代表了電動汽車車身的整體位姿,通過全局定位確定車身的先驗位姿。
3)三角目標局部精定位
三角目標就近安裝在每個電池箱附近的固定位置,可以說,三角目標的位姿即代表了電池箱的位姿。三角目標一般設置比車架變形誤差的尺寸要大,比矩形目標尺寸要小。局部定位實際上是對先驗位姿重新修正的過程,體現了融合多傳感器數據以產生更精確計算位姿的思路。
2.2 基于視覺傳感器的矩形目標全局粗定位
視覺定位的核心任務是從這些視覺傳感器捕捉的圖像中提取出期望的圖像特征并與環境特征建立某種一致性的聯系。在這里對矩形目標的定位,實質上是對直線段進行提取和定位的過程。針對我們的應用背景是二值圖像的原因,簡化了直線提取的算法,這一過程,我們使用直線支持區的概念。先用搜索和計算的方法獲得屬于某條直線的所有點,即獲得該直線的支持區點集,然后在此基礎上結合最小二乘法求出精確的直線參數,最后求出矩形目標的位姿參數。
由于任意一條直線與凸多邊形最多只有兩個交點,所以對于凸多邊形物體邊緣的二值圖像,若存在三個相距足夠遠的像素點處于同一條直線上,則這三點必然位于該凸多邊形的一條邊上,由此確定該多邊形的一條邊。該算法主要步驟如下:
1)從圖像中搜索出位于同一條直線上相距足夠遠的三個像素點,由此確定第一條粗糙直線,并找出所有屬于這條直線的點,這些點就構成該直線支持區點集;
2)對1)中得到的點集進行最小二乘法擬合,得到該直線的精確方程;3)從原圖像中刪除1)中所得的直線支持區點集;4)重復以上步驟,在剩余點中找出矩形目標剩下的三條直線段;
5)通過計算出的四條直線段即矩形目標的四條邊在視覺坐標系xz平面中的投影,據此計算出矩形目標的位姿參數。
2.2.1 粗糙直線段提取
首先,提取目標直線段上相距足夠遠的三個像素點,其方法是采用從上到下、自左向右逐行掃描圖像的方法,遇到第一個黑像素點便停止該行的掃描,并記下該點坐標。隔數行或數列用類似方法搜索出第二個和第三個黑像素點。
其次,將這三個像素點兩兩相連,可構成三條直線,若計算出兩兩直線之間的夾角(取銳角)α1,α2,α3均小于設定的閾值αmax,則認為此三點構成一條直線,若不滿足則去除第一像素點,并繼續掃描計算;若找不到滿足的第一像素點,則去除第二像素點,并重新掃描計算,直到找到一條直線段。
最后,對已找到的直線進行驗證。掃描整個圖像,找出所有該直線段充分小鄰域內的像素點,若所得像素點的數目大于設定的閾值Ts,則可判定該直線正確,否則重復以上所有操作,直至找到滿足上述要求的一條直線段。以此類推,找出剩下的三條直線段。
2.2.2 精確直線段提取
由于采用隨機所得的三點確定一條直線段,存在一定的誤差,因此,本文利用最小二乘法進行精確直線的擬合。上節所得粗糙直線段充分小鄰域內的像素點定義為該直線段的支持區點集,記為:


其中,L為法線長度,θ為法線與x軸夾角。
直線段的支持區點集P內所有點到粗糙直線的距離的平方和為:

為使D最小,就是要求出參數θ和L,故對θ和L求偏導,令:


由式(4)可得:
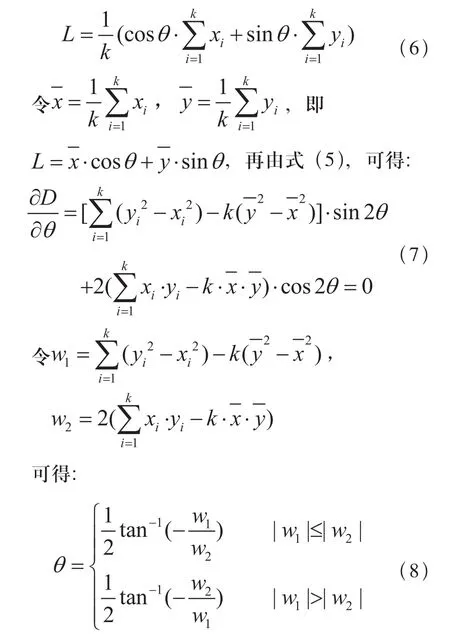
將式(8)代入式(6),就可求得參數L,將求得的θ和L代入式(2),可確定直線精確的法線式方程。
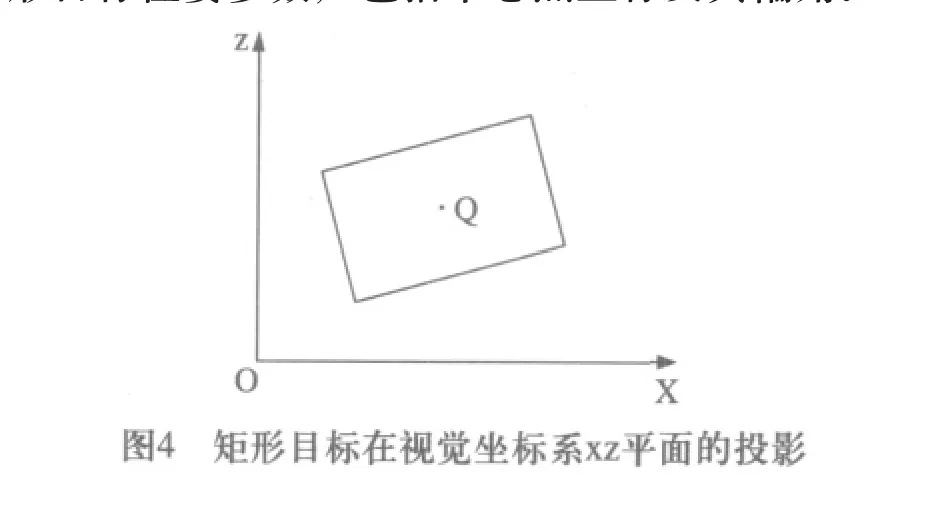
2.2.3 矩形目標位姿確定
通過上一節算法可依次確定矩形目標的四條直線段,此四條直線段組成的四邊形即矩形目標在視覺坐標系xz平面內的投影,如圖4所示,矩形目標的位姿誤差即反映車輛停靠位姿的偏差。由于四邊形的直線精確方程已計算出,可求得矩形目標位姿參數,包括中心點坐標及其偏角。
2.3 基于激光傳感器的三角目標局部精定位
通過上述方法確定了矩形目標的中心坐標及其偏角后,可依據三角目標和矩形目標的中心坐標的理論空間關系,計算出三角目標中心的粗糙位置。值得注意的是,由于電動汽車運行中車架變形等諸多因素,計算出的三角目標中心坐標與其實際位置會有偏差。通過電池箱更換設備的雙激光傳感器對電池箱附近的兩個三角目標進行一次同時掃描,即可據以下方法進行二次計算修正。
以人為本,實質上反映的是一種人本管理理念,既保留人性化管理對人的尊重,調動起人的主觀能動性,用每個人的發展來推動高校整體的發展,又不喪失以制度為標準的原則,讓管理仍然有章可循。建設以人為本的高校文化建設,可以將高校內控制度化的一面內化到高校成員的言行中,將高校內控的控制意識轉化為高校成員的潛意識。以人為本思想的普及,可以自上而下帶動優秀高校文化建設進一步進行鞏固,高校內部控制系統得到持續完善。
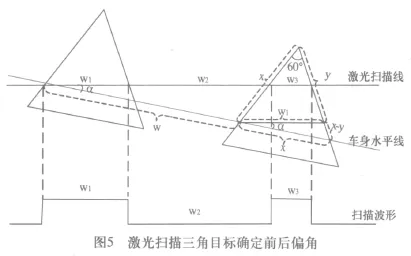
2.3.1 三角目標前后偏角
為確定電池箱前后方向偏角,采用電池箱更換設備的雙激光傳感器對電池箱附近的三角目標進行激光掃描,如圖5所示。
結合圖5,由三角形余弦定理:
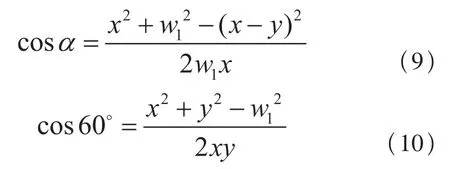
由式(9)和式(10),可得出:

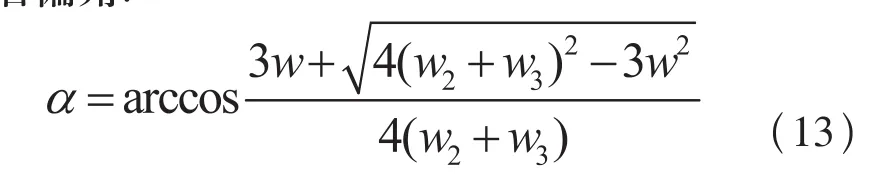
根據三角形關系:

根據式(10)、式(11)和式(12),計算電池箱前后偏角:
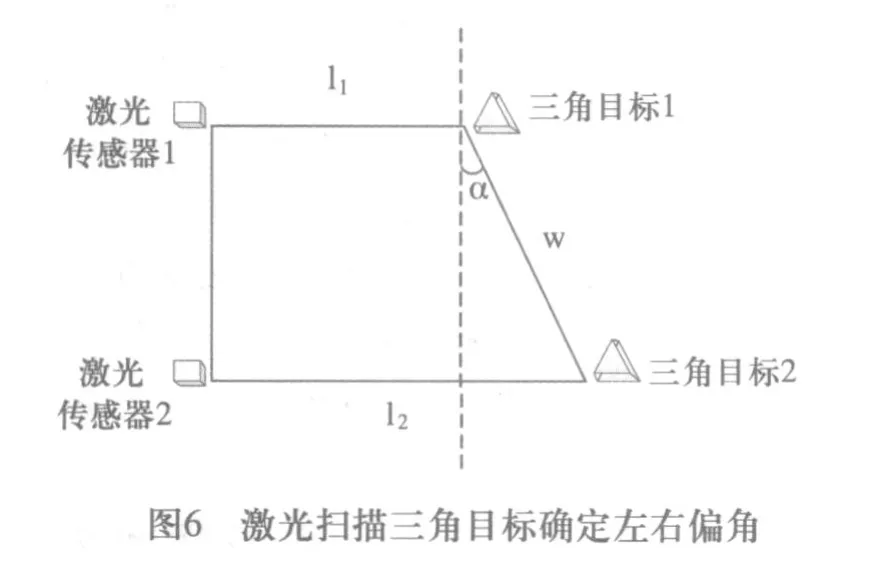
2.3.2 三角目標左右偏角
對三角目標前后偏角修正后,激光傳感器掃描三角目標確定左右偏角就變得簡單了。圖6為掃描示意圖,w為兩個三角標之間的固定距離,l1和l2為測得的激光傳感器和三角目標距離,使用如下方法計算左右偏角即可:

3 工程應用
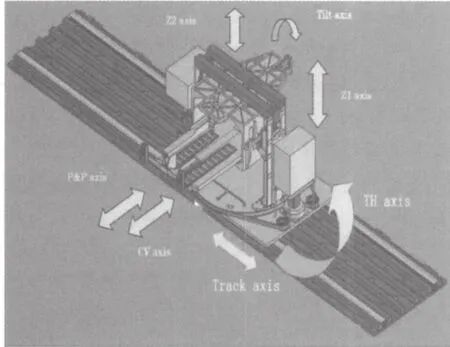
圖7 電池箱更換設備各軸動作
基于視覺傳感器和激光傳感器的多重定位技術步已經成功運用于國網電力科學研究院最新研制的全自動電池箱更換設備上,解決了電池箱更換設備對車輛的全局定位和局部定位問題。電池箱更換設備通過安裝在車身固定位置上的矩形目標定位車輛的整體位姿,通過電池箱附近就近安裝的三角目標定位電池箱的精確位姿。計算出車輛電池箱的不同位姿后,通過調整電池箱更換設備的各軸運動參數即可實現對電池箱的高精度裝卸動作,如圖7所示。
4 結論
本文提出了基于視覺與激光等多傳感器信息融合的定位方法,實現了全自動電池箱更換設備對電動汽車的全局粗定位和局部精定位,使得電池箱更換設備對電動汽車電池箱具有更好的適應性,更好地服務于電動汽車充換電設施的建設,進一步促進電動汽車的快速、健康發展。
[1] Borenstein J, Feng L.Measurement and correction of systematic odometry errors in mobile robots[J].IEEE Transactions on Robotics and Automation, 1996, 12(6):869-880
[2] Borenstein J, Feng L.UMBmark-a method for measuring,comparing, and correcting dead-reckoning errors in mobile robots[J].Technical Report UM-MEAM-94-22, University of Michigan, 1994.
[3] Lionis G S, Kyriakopoulos K J.A laser scanner based mobile robust SLAM algorithm with improved convergence properties.[C] In: Proceedings of the 2002 IEEE International Conference on Intelligent Robots and Systems.Lausanne, Switzerland October 2002.582-587.
[4] Walthelm A.New approach to global self-localization with laser range scans in unstructured environments[C].In: Proceedings of 2002 Intelligent Vehicle Symposium.2002.17-21.
[5] Hashem T, Henrik A, Andre T.Localization of Mobile Robots with Omnidirectional Vision Using Particle Filter and Iterative SIFT[J].Robotics and Autonomous Systems,2006,54(9):758-765.
[6] 潘良景, 陳衛東.室內移動機器人的視覺定位方法研究[J].機器人, 2006, 28(5): 504-509.
[7] 王景川, 陳衛東, 曹其新.基于全景視覺與里程計的移動機器人自定位方法研究[J].機器人, 2005, 27(1): 41-45.
[8] 莊嚴, 王偉, 王珂, 等.移動機器人基于激光測距和單目視覺的室內同時定位和地圖構建[J].自動化學報, 2005,31(6): 925-933.
[9] 王衛華, 熊有倫, 孫容磊.測程法系統誤差的測量與校核[J].機器人, 2004, 26(5): 454-460.
