形狀記憶合金絲驅動的仿生噴射推進器
2011-07-18 03:36:54王揚威王振龍
哈爾濱工業大學學報 2011年9期
關鍵詞:結構
王揚威,王振龍,李 健
(哈爾濱工業大學機器人技術與系統國家重點實驗室,150001哈爾濱,wywkly@126.com)
形狀記憶合金絲驅動的仿生噴射推進器
王揚威,王振龍,李 健
(哈爾濱工業大學機器人技術與系統國家重點實驗室,150001哈爾濱,wywkly@126.com)
為了給水下機器人提供一種高速、高效、高機動性、高隱蔽性的推進器,研制了一種采用形狀記憶合金絲驅動的模仿烏賊噴射推進原理的仿生噴射推進器.對烏賊的噴射推進機理和烏賊外套膜肌肉結構進行了分析.在適當簡化的基礎上,模仿烏賊外套膜的肌肉結構設計了記憶合金絲驅動的仿生噴射推進器結構,建立了推進器的幾何模型.對推進器樣機進行了初步性能實驗.實驗結果表明:仿生噴射推進器徑向收縮均勻,能較好地模仿烏賊外套膜的柔性收縮運動,最大收縮應變8.8%,最高游速58 mm/s.該推進器結構簡單,動作柔性好,游動無噪聲,為研制仿生機器烏賊奠定了基礎.
水下機器人;形狀記憶合金絲;烏賊;仿生噴射推進器
傳統的水下機器人采用的是螺旋槳推進器,其推進過程中存在傳動結構復雜、推進效率低和噪聲大等問題.隨著計算機技術、仿生學、機電一體化技術、材料科學的發展,模仿水中生物游動模式的仿生水下機器人應運而生,如機器魚[1-3]、機器龍蝦[4]、機器蝌蚪[5]、機器水母[6]、機器烏賊[7]等.在水生動物中有一類動物是采用噴水推進方式游動,通過收縮身體直接將身體腔室內的水噴出,產生矢量推力.噴水推進方式可以實現高速、高效、靈活機動的游動運動,具有較高的仿生價值.科研人員研制出多種噴水推進裝置.科羅拉多州立大學的Mohseni等[8]研制了一種渦流推進器(vortex ring thruster,VRT).加州理工學院的Thomas等[9]研制了一種新型的噴水推進器.哈爾濱工程大學的郭書祥等人研制出仿生水母[6].
本文對烏賊噴水推進機理和烏賊外套膜結構進行了分析.采用形狀記憶合金絲驅動器,模仿烏賊外套膜肌肉結構設計了仿生噴射推進器.并對其進行了初步的實驗研究.設計的仿生噴射推進器結構簡單,密度與水接近,能夠實現柔性的收縮噴射動作.
1 烏賊噴射推進機理
烏賊(見圖1)屬于軟體動物門頭足綱,其游動運動是采用鰭波動運動和噴射推進復合方式實現的.在烏賊身體兩側,對稱分布有一對三角形鰭,通過鰭的波動運動能夠實現游動和懸浮.依靠噴射推進運動,烏賊可以實現以較高的速度游動.而鰭波動運動主要在烏賊低速游動過程發揮作用.
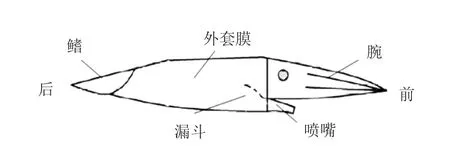
圖1 烏賊身體結構示意圖
烏賊的噴射推進過程包括充水過程和噴射過程(見圖2).在充水過程中,舌瓣閉合,利用外套膜擴張形成的負壓將水從開口處吸入,充滿外套膜腔;在噴射過程中,舌瓣打開,外套膜收縮將腔內的水從噴嘴噴出.充水過程和噴射過程交替進行,從而利用脈沖噴射的反作用力推進烏賊實現游動.烏賊噴射過程中,噴口會隨噴射時間的增加而減小,來獲得更高推進動能[10].噴射過程中,烏賊外套膜腔內的壓力較高,質量0.35 kg的Loligo vulgaris烏賊,其外套膜腔內壓力可達30 kPa[11].
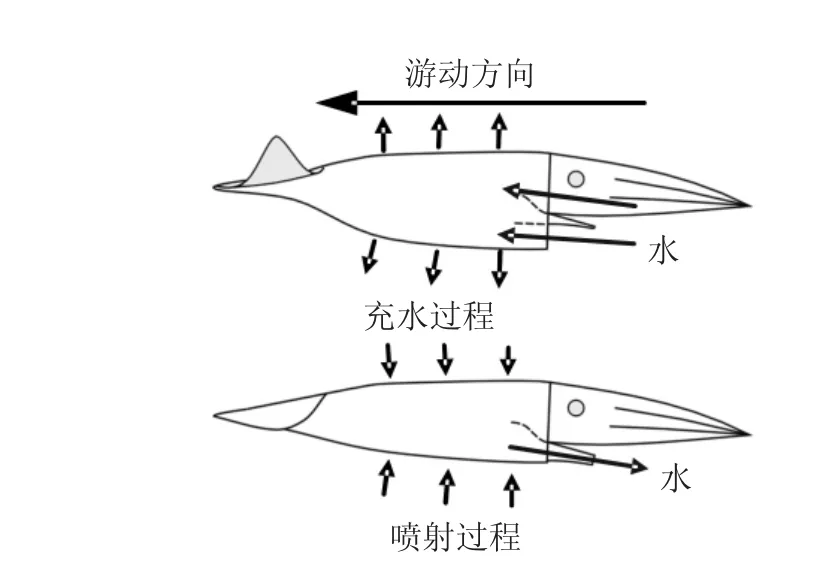
圖2 烏賊噴射推進過程[12]
2 烏賊外套膜肌肉結構
在烏賊的身體內沒有硬骨骼,整個身體都是依靠三維排列的肌肉纖維和結締組織支撐,這種肌肉性靜水骨骼結構具有不可壓縮性,且能夠產生較大的形變.
圖3為槍烏賊外套膜結構示意圖,上下兩個剖視圖分別為肌肉和肌內結締組織纖維(Intramuscular connective tissue fiber,IM).烏賊的外套膜肌肉結構包括:內被膜(Inner tunic,IT)、外被膜(Outer tunic,OT)、環狀肌纖維(Circular muscle fiber,CM)和放射肌纖維(Radial muscle fiber,RM).

圖3 槍烏賊外套膜肌肉結構[13]
在充水過程中,前一次噴射過程中存儲在IM-1和IM-2中的彈性能釋放,放射肌纖維同時收縮,使外套膜擴張充水,同時在IM-3中存儲彈性能;在噴射過程中,首先在IM-3中存儲的彈性能被釋放,環狀肌纖維同時收縮,外套膜腔的體積減小,同時彈性能存儲在IM-1和IM-2中.結締組織在噴射運動過程中對于彈性能的存儲和釋放有利于減小能量消耗.
3 仿生噴射推進器設計
3.1 設計簡化
烏賊的噴射推進運動是外套膜、漏斗和噴嘴協調完成的,其中外套膜的收縮運動是主要運動.烏賊高速運動時,采用環狀肌和放射肌交替快速收縮運動,實現高頻率的噴射推進.烏賊低速游動時,其噴射運動頻率較低,約為1.6~2.2 Hz,外套膜依靠環狀肌實現收縮運動,而放射肌在充水過程中不收縮,外套膜僅依靠彈性能實現回復充水.
本文設計的仿生噴射推進器是模仿烏賊低頻率噴射時的慢速游動動作.該推進器的簡化設計原則為:a)仿生外套膜能模擬烏賊外套膜的收縮和擴張運動,其橫截面呈圓環形,收縮運動為主動運動,擴張運動依靠彈性能實現;b)整個仿生外套膜結構為近似肌肉性靜水骨骼結構的準柔性結構;c)受仿生外套膜厚度限制,很難模擬放射肌的收縮運動,所以仿生噴射推進器僅模擬環狀肌纖維的收縮運動.
3.2 驅動器選擇
仿生噴射推進器設計中驅動器的選擇非常重要.為了很好地模擬肌肉的收縮運動,需要驅動材料能夠提供足夠的輸出力和功率,且產生足夠的變形量.目前廣泛使用的能夠模仿肌肉特性的材料主要包括:壓電陶瓷(PZT)、離子聚合物復合材料(IPMC)、形狀記憶合金(SMA),各種材料的主要性能參數如表1所示.

表1 SMA、IPMC、PZT主要性能參數
PZT致動器具有驅動響應快、驅動力大、驅動功率低等優點,但其驅動電壓高、位移量小,且制作工藝復雜.IPMC致動器具有體積小、驅動電壓低、形變大等優點,但其輸出力小.SMA致動器具有體積小、控制方便和結構簡單等優點.TiNi基SMA具有較高的電阻率、較大的回復應變和回復應力,且能量密度較高,被廣泛應用于各種仿生結構.SMA絲類似于烏賊的環狀肌,便于布置和嵌入到仿生結構中,更適合作為仿生噴射推進器的驅動器.
3.3 結構設計
仿生噴射推進器外形與烏賊相似,由仿生外套膜和漏斗組成.仿生噴射推進器的結構如圖4所示(圖中未畫出SMA絲和導線).仿生外套膜的橫截面呈圓環形,前部收緊封閉,后部呈敞開狀態,通過外套膜的收縮和擴張,能夠實現噴射和充水.漏斗由PVC材料制成,安裝在外套膜后端開口處,后端為噴口.

圖4 仿生噴射推進器結構
仿生外套膜前段呈錐型,后部呈圓柱形.仿生外套膜結構由筋條、SMA絲、柔性機體組成.柔性機體的主體結構為有機硅膠灌注成型,硅膠材料具有柔性好、彈性好、性能穩定、抗撕裂性好等優點,且其密度與水接近.筋條均勻的沿周向分布,嵌入在柔性機體中,起支撐作用,每兩根相鄰筋條之間通過SMA絲連接,SMA絲布置呈“V”形,用以提高仿生外套膜的徑向變形量,利用SMA絲的收縮運動來拉動筋條,從而使整個仿生外套膜收縮.
仿生噴射推進器中仿生外套膜的動作過程為:仿生外套膜收縮時,SMA絲通電加熱收縮,拉動相鄰的筋條,使得筋條之間的間距縮小,從而使仿生外套膜整體徑向收縮,同時在硅膠內存儲彈性能.仿生外套膜擴張時,SMA絲斷電,依靠存儲在硅膠內的彈性能促使仿生外套膜擴張回復.SMA絲與筋條之間的夾角,SMA絲的數量和絲徑直接影響仿生外套膜的應變.
3.4 幾何模型
仿生外套膜中SMA絲的布置如圖5所示.為簡化分析仿生外套膜的變形,假設:1)仿生外套膜收縮時縱向長度不變,且變形過程任意時刻厚度不發生變化;2)仿生外套膜在收縮和擴張運動過程中,其內、外壁橫截面始終保持圓弧形;3)忽略仿生外套膜運動過程中筋條變形對仿生外套膜變形的影響;4)SMA絲在動作過程中保持均勻收縮.
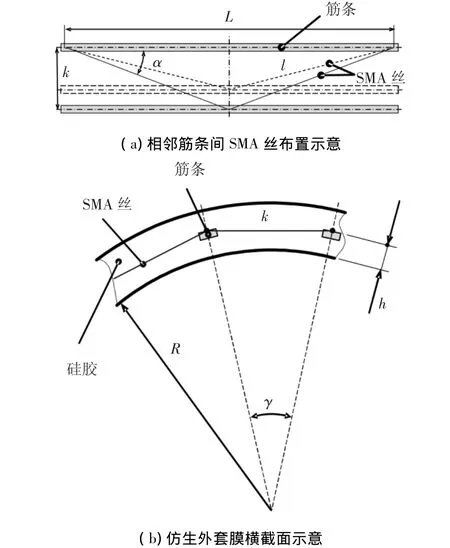
圖5 仿生外套膜中SMA絲示意圖
基于上述假設,相鄰兩個筋條的間距可以表示為

式中,k是相鄰兩個筋條的間距,R是仿生外套膜的內徑,h是SMA絲安裝點到仿生外套膜內壁的距離,γ是相鄰兩個筋條對應的圓心角.
相鄰兩個筋條間SMA絲的長度為

式中,l是SMA絲的長度,L是SMA絲筋條固定端的間距;
相鄰兩個筋條間SMA絲的應變為

式中,α是SMA絲與筋條的初始夾角,ε是SMA絲的應變.
4 仿生噴射推進器實驗
為了驗證仿生噴射推進器的推進性能,進行了初步實驗研究.仿生噴射推進器樣機的仿生外套膜長260 mm,外徑 110 mm,內徑86 mm,內部均勻嵌入11根筋條,SMA絲筋條固定端間距130 mm,直徑0.175 mm,與筋條的初始夾角25°.錐形漏斗由 PVC制成,長100 mm,厚0.2 mm,噴口直徑23 mm.漏斗前端插入仿外套膜內側.仿生噴射推進器的質量805 g,充水量1 250 g.圖6為漂浮狀態的仿生噴射推進裝置.從圖中可以看出該推進器的平均密度約等于水.
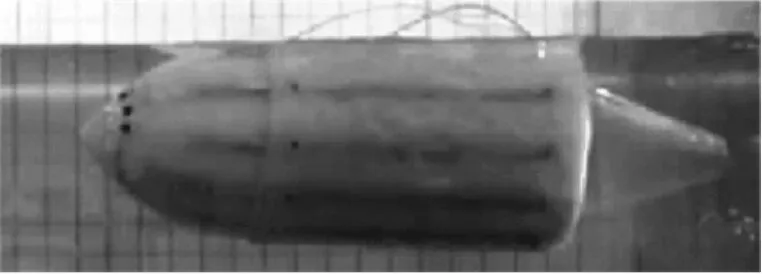
圖6 仿生噴射推進器
實驗時采用直流電源驅動 SMA絲,電流18 A,通電時間2.5 s.采用攝像機對實驗過程進行記錄,通過視頻處理軟件對圖像進行處理.實驗過程中,推進器的仿生外套膜收縮均勻,推進器游動平穩、沒有噪聲.仿生噴射推進器的仿生外套膜外徑應變和SMA絲的應變曲線如圖7所示.推進器的位移和速度曲線如圖8所示.

圖7 仿生外套膜外徑和記憶合金絲收縮曲線
實驗結果表明:①仿生噴射推進器徑向收縮均勻,仿生外套膜外徑最大收縮應變8.8%,能較好地模仿烏賊外套膜的柔性收縮運動,最高游速58 mm/s.②從圖7中可以看出:0~2.5 s,SMA絲通電收縮帶動仿生外套膜收縮,并達到最大應變;2.5~4.0 s,SMA絲斷電,儲存在硅膠中的彈性能釋放,使得仿生外套膜擴張回復;4~6 s,SMA絲緩慢冷卻,SMA絲的應力與硅膠的擴張力基本平衡;6 s以后,SMA絲冷卻到相變點以下,仿生外套膜擴張回復到初始狀態.SMA絲收縮應變的計算曲線顯示,SMA絲應變很小時,就可以使仿生外套膜產生較大應變.③從圖8中可以看出:0~0.6 s,速度迅速增加;0.6~2.5 s區間,速度開始緩慢降低;2.5 s以后,速度逐漸減低.

圖8 仿生噴射推進器位移和速度曲線
5 結論
1)在對烏賊游動機理和外套膜肌肉結構進行分析的基礎上,研制了仿生噴射推進器.該推進器結構簡單,無任何傳動機構,密度接近于水,具有動作柔性好,游動無噪聲等優點,為研制機器烏賊奠定了基礎.
2)由于SMA絲驅動的仿生外套膜收縮量小,收縮頻率低,使得該推進器游動速度較低,制約了推進器的實用性.
3)下一步擬采用改進SMA絲的布置方式及驅動控制方法,提高硅膠的柔性來提高推進器的游動速度.
4)隨著設計的逐步改進和完善,仿生噴射推進器必將為水下機器人的發展提供一種新型、高效的水下推進裝置.
[1]TECHET A H,HOVER F S,TRIANTAFYLLOU M S.Separation and turbulence control in biomimetic flows[J].Flow,Turbulence and Combustion, 2003,771(1/2/3/4):105-118.
[2]LIU J,DUKES I,HU H.Novel mechatronics design for a robotic Fish[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems.Edmonton:IEEE,2005:2077-2082.
[3]LOW K H,WILLY A.Biomimetic motion planning of an undulating robotic fish fin[J].Journal of Vibration and Control, 2006,12(12):1337 -1359.
[4]SAFAK K K,ADAMS G G.Modeling and simulation of an artificial muscle and its application to biomimetic robot posture control[J].Robotics and Autonomous System, 2002,41(4):225-243.
[5]KIM B,KIM D H,JUNG J H,et al.A biomimetic undulatory tadpole robot using ionic polymer-metal composite actuators[J].Smart Materials and Structures, 2005,14(6):1579-1585.
[6]GUO Shuxiang,SHI L,YE X,et al.A new jellyfish type of underwater microrobot[C]//IEEE International Conference on Mechatronics and Automation.Harbin:IEEE,2007:509-514.
[7]VISHAL.Squid robot underwater inspector armed with biomimetic propulsion technique[EB/OL].(2010-04-20).http://www.robotster.org/entry/squid-robot-underwater-inspector-has-biomimetic-propulsion-technique.
[8]KRIEG M,MOHSENI K.Thrust characterization of a bioinspired vortex ring thruster for locomotion of underwater robots[J].Journal of Oceanic Engineering, 2008,33(2):123-132.
[9]THOMAS A P,MILANO M,G'SELL M G,et al.Synthetic jet propulsion for small underwater vehicles[C]//Proceedings of the IEEE International Conference on Robotics and Automation.Barcelona:IEEE,2005:181-187.
[10]BARTOL I K,PATTERSON M R,MANN R.Swimming mechanics and behavior of the shallow-water brief squid Lolliguncula brevis[J].Jurnal of Experimental Biology, 2001,204(21):3655-3682.
[11]JOHNSON W,SODEN P D,TRUEMAN E R.A study in jet propulsion:an analysis of the motion of the squid,Loligo vulgaris[J].Journal of Experimental Biology, 1972,56(1):155-165.
[12]王振龍,杭觀榮,王揚威,等.烏賊游動機理及其在水下仿生機器人上的應用[J].機械工程學報, 2008,44(6):1-9.
[13]KIER W M,THOMPSON J T.Muscle arrangement,function and specialization in recent coleoids[J].Berliner pal?obiologische Abhandlungen,2003(3):141 -162.
A biomimetic water-jetting vehicle actuated by shape memory alloy wires
WANG Yang-wei,WANG Zhen-long,LI Jian
(State Key Laboratory of Robotics and System,Harbin Institute Technology,150001 Harbin,China,wywkly@126.com)
To provide propulsive machine for underwater robot with high speed,high efficiency,high maneuverability and high hidden,a biomimetic water-jetting vehicle that imitated jetting propulsive principle of squids actuated by shaper memory alloy wires is developed.The jetting propulsive mechanism and the muscle structure of squids are analyzed firstly.Then the structure of the biomimetic water-jetting vehicle,imitating the muscle structure of squids,and based on proper simplification is designed.The geometrical model is set up.At last,the propulsive performance of the vehicle is experimented.The experimental results show that the biomimetic water-jetting vehicle can imitate the flexible contract of the mantle of squids;the radial contract is uniform;the maximal contractive strain is 8.8%and the maximal swimming speed is 58 mm/s.In conclusion,the vehicle has simple structure,flexible jetting motion and zero noise,providing basis for further research on biomimetic robot squid.
underwater robot;shaper memory alloy wire;squid;biomimetic water-jetting vehicle
TP242.3
A
0367-6234(2011)09-0033-05
2010-05-11.
國家自然科學基金資助項目(50775049);機器人技術與系統國家重點實驗室(哈爾濱工業大學)自主研究課題(SKLRS200805C).
王揚威(1980—),男,博士研究生;
王振龍(1963—),男,教授,博士生導師.
(編輯 楊 波)
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
