生物芯片反應儀控制系統的設計
2011-08-23 08:33:50蔡錦達何軍湘宋韞崢趙國初
制造業自動化 2011年15期
關鍵詞:振動
蔡錦達,何軍湘,宋韞崢,趙國初
CAI Jin-da, HE Jun-xiang, SONG Yun-zheng, ZHAO Guo-chu
(上海理工大學 機械工程學院,上海 200093)
0 引言
生物芯片反應儀是一種用于臨床醫學的設備,其具有結構簡單、重量輕、振動噪聲小、振動頻率范圍大等特點。它集反應、清洗功能于一體,主要完成以下功能:樣品的振動反應、反應殘留物的清洗、反應效果檢測等。
1 反應儀的結構和工作原理
生物芯片反應儀的結構如圖1所示。系統主要組成部分有:反應機構和清洗機構。
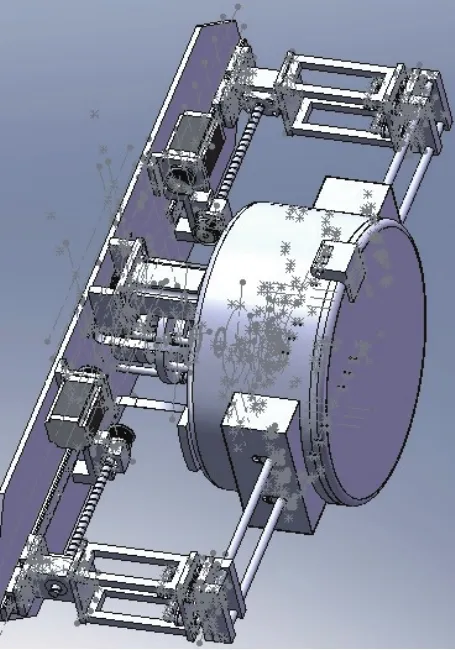
圖1 反應儀裝配圖
清洗移動采用步進電機帶動滾珠絲桿進行傳動,可以保證良好的位置精度,而振動反應則采用直流電機帶動偏心機構轉動的方式來進行往復運動,通過調節電機的速度而調節振動頻率。未進入反應箱之前彈簧處于預壓狀態,使載物臺下側的檔塊緊貼著支撐架右側,以保證載物臺與支撐架無相對位移,載物臺跟隨支撐架通過滾珠絲杠將步進電機的轉動轉化為直線運動;在進入反應箱后,步進電機不再轉動,此時載物臺的右側已頂住頂桿,使左側彈簧的受力狀態開始發生變化,當直流電機轉動帶動凸輪轉動時,彈簧從預壓狀態繼續進行壓縮,周而復始變化,使載物臺發生振動;振動結束后,支撐架通過滾珠絲桿轉動離開反應箱,載物臺脫離頂桿,彈簧再次回到預壓狀態,并由步進電機帶動芯片進入清洗狀態。
2 電氣控制系統設計
2.1 控制系統組成及PLC的I/O端口分配
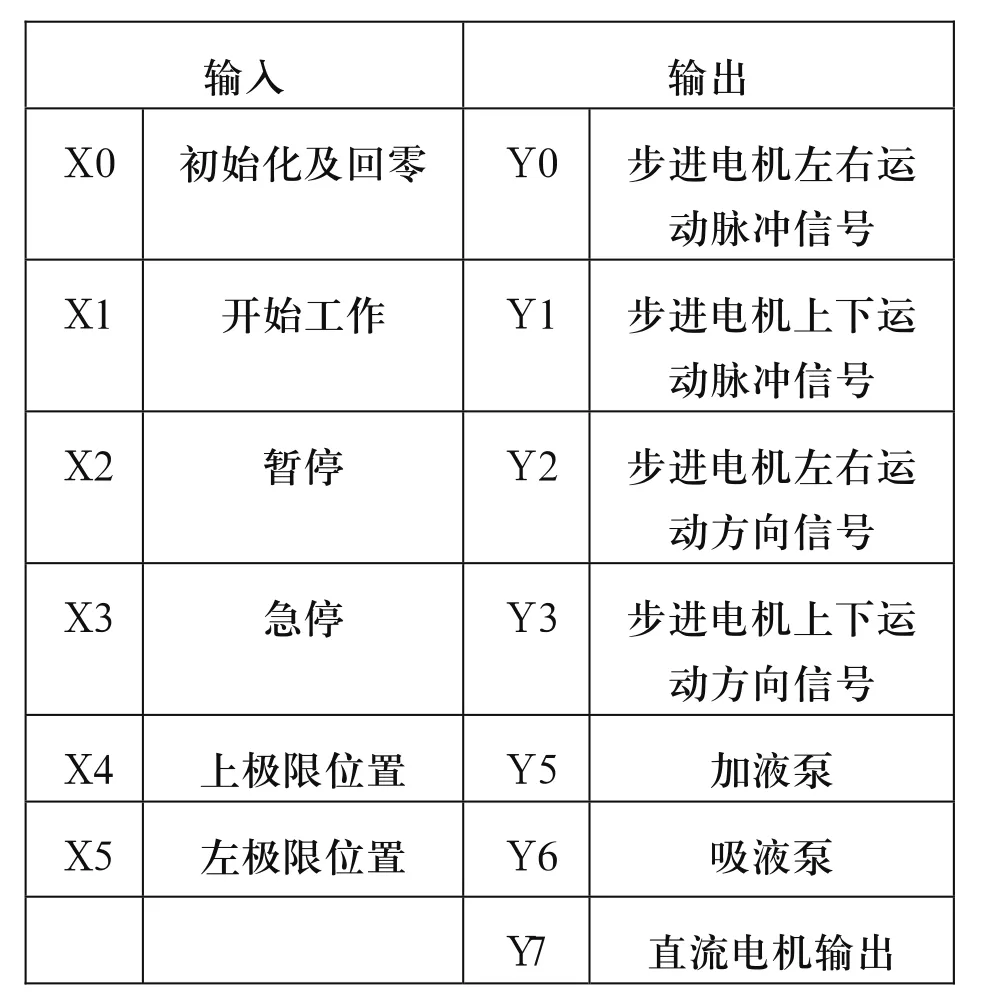
表1 PLC的 I/O分配表
生物芯片反應儀需要人機交互,其控制系統以觸摸屏為上位機,以控制核心PLC為下位機,兩者之間采用RS-232進行通訊。其執行機構有步進電機和直流電機帶動的偏心振動機構等。根據控制要求,選用松下FP0-C32T型PLC,16點直流輸入,16點晶體管輸出,其I/O端口分配如表1所示。
2.2 反應儀的流程及控制要求
2.2.1 工藝流程
依據設備功能要求,繪制反應儀工作的工藝流程如圖2所示。
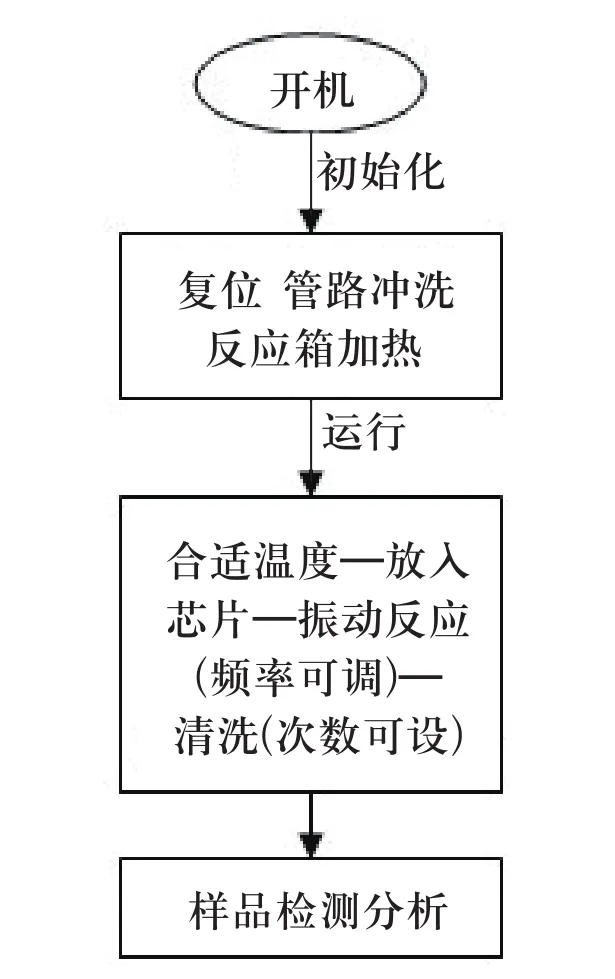
圖2 工藝流程圖
生物芯片反應儀在開機后先初始化,包括:管路的清洗、反應箱的加熱、針頭復位回零;初始化后就是蛋白芯片的振動反應及反應后清洗;最后是蛋白芯片信息的檢測及存儲和信息對比。各種參數在沒開始工作前根據生物芯片就已設定好。
2.2.2 控制要求
反應儀自動控制系統中有三個重要組成部分:第一是清洗針頭的精確定位,使用步進電機控制。首先選取合適的步進電機的步進角,然后運用細分技術對步進角進行細分,可以使定位精度達到很高的要求。此外,兩路清洗針頭各自左或右運動是由兩個步進電機同步動作實現控制的,其由一路脈沖輸出控制;第二是直流電機調速,使用PLC自帶的PWM方式進行控制。其具有調速范圍寬廣,調速特性平滑,及很好的回轉特性和輸出效率等特點,可以很好的滿足反應儀對振動頻率的設計要求;第三是反應箱的溫度控制,使用溫控儀(PID)進行控制。PLC通過RS-485與溫控儀進行通訊,設定控制溫度并讀取當前溫度值存儲到數據寄存器中,而觸摸屏又通過RS-232通訊方式讀取和更改PLC的寄存器數值,從而實現了溫度的設置、更改和實時監控。
生物芯片反應儀的控制為自動控制,其控制流程如下:開機上電接通X0初始化,加液泵與吸液泵工作沖洗管路(沖洗時間、次數可由觸摸屏設定),反應箱進行加熱(PID調節),左右針頭回到左右零位和上零位;初始化后觀察溫度達到預先設定的值,放入蛋白芯片,接通X1開始工作,直流電機帶動偏心機構振動反應(振動頻率、時間可調);反應后,載物臺退出反應箱進入清洗狀態,步進電機通過脈沖數進行準確定位;最后就是蛋白芯片的信息檢測和管理。此外,在控制系統中設有暫停和急停按鈕,無論何種狀態按下暫停可以使系統暫停運行,再按可繼續運行。而按下急停按鈕后,整個系統所有設備停止運行,斷開電路。截取的部分梯形圖如圖3所示。
2.3 觸摸屏系統管理
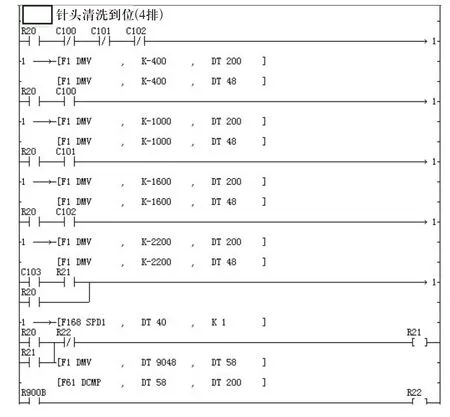
圖3 部分程序梯形圖
觸摸屏作為上位機,需要對系統的參數進行管理和設定,如管路清洗時間、反應時間和溫度、針頭清洗次數和定位脈沖數等。觸摸屏的另一個功能是芯片信息的管理。對反應后的生物芯片進行反應效果檢測等,獲得樣品大量的生物信息,這些信息需要存儲在觸摸屏內,并且反應儀需要對各種肝炎病毒和腫瘤相關的標志物等進行對比檢測,因此它們的信息也要存儲到觸摸屏中。
3 結束語
該生物芯片反應儀控制系統較復雜,主要體現在反應箱的溫度控制、清洗的定位控制、以及與觸摸屏連接實現對參數的控制修改等。運用PLC控制其完成各種規定的工序動作,實現了反應儀的自動化,提高了工作效率。該生物芯片反應儀著重解決了蛋白質芯片的高效反應和清洗減少殘留物的問題,在整個改進設計和分析探討過程中注意了環保和安全系統設計理念,對于我國生物芯片技術的臨床醫學應用和產業化道路發展具有重大意義。
[1]閻鳳.生物芯片反應儀的研制[D].上海理工大學,2009.
[2]松下電工中國有限公司.FP用系列編程手冊[Z].2004.
[3]松下電工中國有限公司.FP用系列編程手冊(補充版)[C].2007.
[4]羅庚興,寧玉珊.氣動安裝機械手的PLC控制[J].制造業自動化,2011,1(33):82-84.
[5]李志明,王東,宋立濱,等.生物芯片微陣列分配機器人系統的研制和開發[J].機器人,2002,24(4):329-334.
[6]賈振中,宋立濱,楊東超,陳懇.接觸式點樣機器人及相關技術研究進展[J].機器人,2007,(02).
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00
