基于加權(quán)總體最小二乘的平面點(diǎn)云擬合方法
2011-09-19 06:22:32樓立志陳瑋嫻
測繪通報 2011年3期
袁 慶,樓立志,陳瑋嫻
(同濟(jì)大學(xué)測量與國土信息工程系,上海200092)
基于加權(quán)總體最小二乘的平面點(diǎn)云擬合方法
袁 慶,樓立志,陳瑋嫻
(同濟(jì)大學(xué)測量與國土信息工程系,上海200092)
根據(jù)每個點(diǎn)云激光反射強(qiáng)度不同以及對于系數(shù)陣A的部分修正,在地面三維激光的平面點(diǎn)云擬合中引入加權(quán)總體最小二乘的方法,建立較最小二乘方法和總體最小二乘方法更加合理的模型。根據(jù)相應(yīng)的迭代算法,經(jīng)實(shí)例計算證明該方法更加合理,可以獲得更高精度的參數(shù)解。
點(diǎn)云;EIV模型;平面擬合;加權(quán)總體最小二乘
一、引 言
在地面三維激光掃描的應(yīng)用中,經(jīng)常會遇到一些點(diǎn)云平面的擬合問題,如墻面平整度檢測、道路路面數(shù)據(jù)擬合等[1]。所謂平面點(diǎn)云擬合,即從掃面點(diǎn)云數(shù)據(jù)中得到一組有關(guān)平面的數(shù)據(jù)(xi,yi,zi)(i=1,2,…,n),利用擬合算法確定空間平面方程參數(shù)。傳統(tǒng)的做法是建立高斯-馬爾科夫(Guass-Markov)模型,采用最小二乘(least squares,LS)方法擬合平面。用LS法可以求得參數(shù)的最或然值,此時需要有一個基本假設(shè),即偶然誤差e只存在于觀測向量Y中,而系數(shù)矩陣A是不受偶然誤差影響的。然而,這并不符合事實(shí),由于模型誤差、人為誤差、儀器誤差等使得點(diǎn)云數(shù)據(jù)中幾乎所有的觀測值中都存在誤差,因此,包含變量的系數(shù)矩陣A也含有誤差。考慮引入總體最小二乘(total least squares,TLS)方法,建立變量誤差(EIV)模型,同時考慮觀測向量和系數(shù)矩陣的誤差。在此基礎(chǔ)上,根據(jù)每個點(diǎn)的激光反射強(qiáng)度定義擬合權(quán)陣,得到加權(quán)總體最小二乘(weighted total least squares,WTLS)的平面擬合方法。經(jīng)實(shí)例計算證明,WTLS方法更加合理,可以得到更高精度的參數(shù)解。
二、最小二乘解算平面參數(shù)
經(jīng)過預(yù)處理后得到一組平面點(diǎn)云數(shù)據(jù)(xi,yi,zi)(i=1,2,…,n),利用擬合算法確定空間平面方程參數(shù)。空間平面方程為

式中,a、b、c為待求參數(shù)。利用線性回歸模型進(jìn)行參數(shù)估計的Guass-Markov模型為
式中
LS估計準(zhǔn)則為


單位權(quán)中誤差為

三、加權(quán)總體最小二乘解算平面參數(shù)
1.EIV模型
考慮系數(shù)矩陣A中誤差的EIV模型為
WTLS估計準(zhǔn)則為

2.WTLS權(quán)陣的定義
在實(shí)際中,每次掃描得到的是被掃平面每個點(diǎn)云的一組信息,這組信息包含了掃描點(diǎn)云的坐標(biāo)信息和激光反射強(qiáng)度信息,即每個點(diǎn)云的三維坐標(biāo)和激光反射強(qiáng)度值。而激光反射強(qiáng)度與入射角度存在如下關(guān)系:E'i=E0cos αi(i=1,2,…,n) ,式中,為每個掃描點(diǎn)的激光反射強(qiáng)度;E0為垂直入射時的反射強(qiáng)度;αi為入射角。即入射角度越接近于90°,激光反射強(qiáng)度越大,點(diǎn)位精度越高,參與擬合的權(quán)重也應(yīng)越大;相反,入射角越接近于0°,激光反射強(qiáng)度越小,點(diǎn)位精度越低,參與擬合的權(quán)重應(yīng)越小[3]。通常的激光反射率是在 (0,255)之間的數(shù)值,通過相應(yīng)的轉(zhuǎn)換關(guān)系 Ei=(E'i×0.303 7+621.872 9)/1 244將反射強(qiáng)度轉(zhuǎn)換為0~1之間的數(shù)值(即Ei),再將Ei作為每個點(diǎn)云相應(yīng)的權(quán)值。假設(shè)點(diǎn)云在x、y、z三個方向等精度獲取,對于平面靶標(biāo)的系數(shù)陣列向量和觀測值,有σx=σy=σz,則具體權(quán)陣形式如下
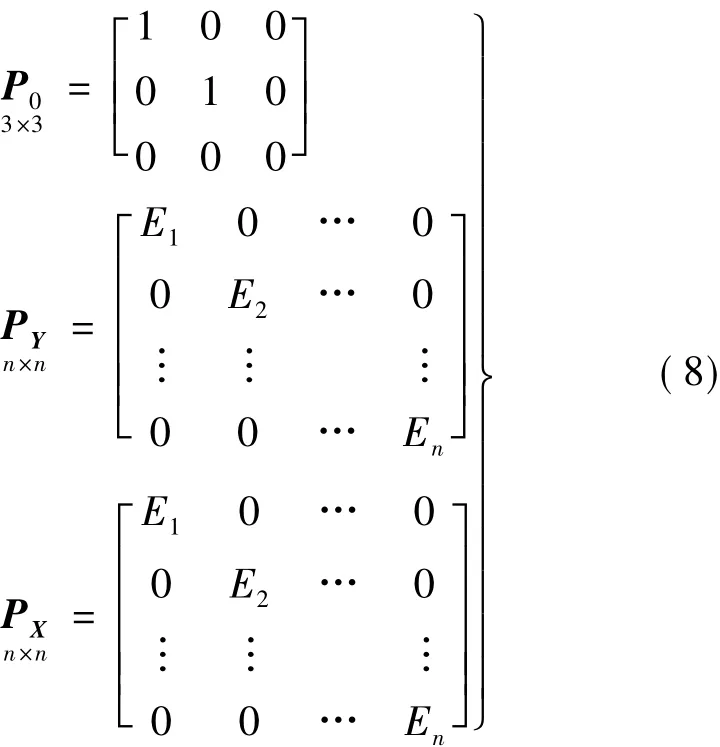
式中,P0為系數(shù)陣A的列向量權(quán)陣,P0的第三個對角元素為0,表示系數(shù)陣A中的第三列不需要改正,其余對角線元素為1,表示系數(shù)陣A中的第一、二列的數(shù)據(jù)列中的元素是等精度獲取的;PY為觀測值權(quán)陣;PX為A陣行向量權(quán)陣。
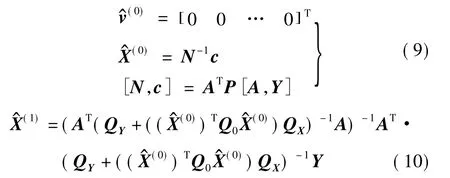
3.迭代法求解參數(shù)及精度評定
根據(jù)Shaffrin提出的迭代法[4]求解點(diǎn)云平面參數(shù)的過程具體如下。
四、實(shí)例分析
本文采用Faro laser scanner對墻面、路面數(shù)據(jù)進(jìn)行掃描得到原始點(diǎn)云,如圖1所示,具體步驟如下。
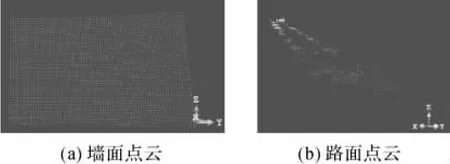
圖1 原始點(diǎn)云
1)為避免由于直線平行于某坐標(biāo)軸而出現(xiàn)數(shù)值問題[5],求出坐標(biāo) (xi,yi,zi)T(i=1,2,…,n) 中的三個坐標(biāo)分量的最大值和最小值之差為Δx、Δy、Δz。在 Δx、Δy、Δz中,若 Δx最小,則按 x=ay+bz+c擬合;若Δy最小,則按y=az+bx+c擬合;若Δz最小,則按z=ax+by+c擬合。
2)將反射率轉(zhuǎn)化為0~1之間的數(shù)值,設(shè)置閾值,濾去噪聲點(diǎn)。
3)在點(diǎn)云平面中任取三個點(diǎn),求出平面參數(shù)初值,計算每個點(diǎn)到平面的距離,將距離小于2 mm的點(diǎn)刪除。
4)根據(jù)式(2)、式(8)組成觀測方程。
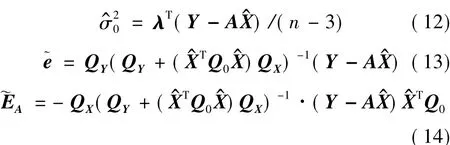
5)根據(jù)式(9)~式(11)求解參數(shù),并由式(12)~式(14)進(jìn)行平差精度評定,與TLS方法和LS進(jìn)行比較,得到的結(jié)果如表1、表2所示。墻面擬合的殘差如圖2所示。
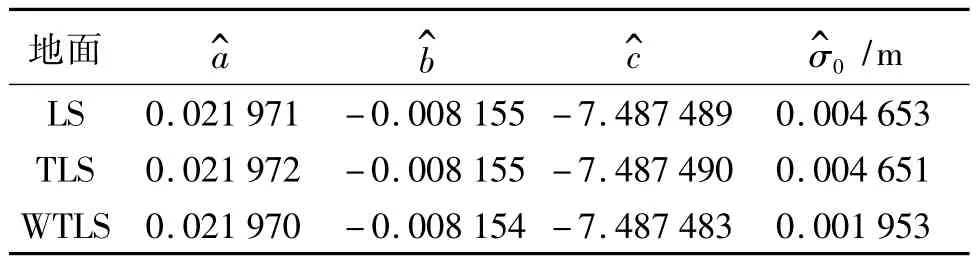
表1 墻面擬合參數(shù)及精度
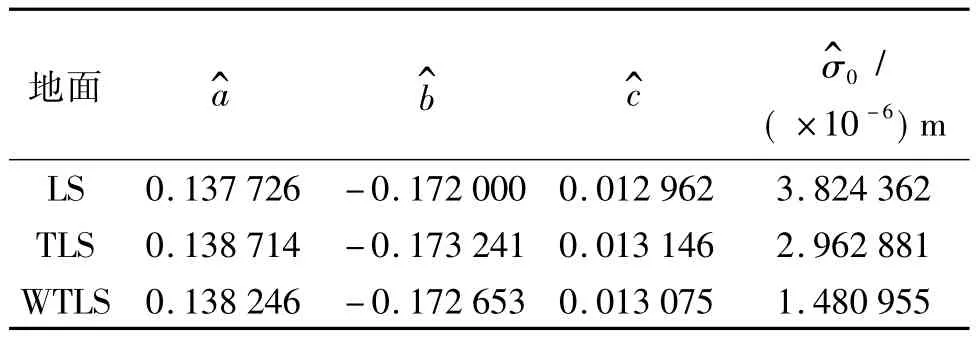
表2 路面擬合參數(shù)及精度
由表1、表2可以看出,WTLS方法擬合的單位權(quán)中誤差要小于LS方法和TLS方法。墻面擬合中WTLS方法得到的精度相對LS方法和TLS方法提高了58%,路面擬合中WTLS方法得到的精度相對LS方法和TLS方法分別提高了61%和50%。由圖2可以看出,LS方法僅僅修改了觀測值向量,而TLS和WTLS方法則修改了系數(shù)陣和觀測值,使得殘差同時出現(xiàn)在觀測向量和系數(shù)矩陣中。且引入點(diǎn)云的權(quán)陣,得到更加合理的擬合模型和更高精度的參數(shù)解。
五、結(jié) 論
1)由于WTLS方法建立的EIV模型對所有變量中的誤差都進(jìn)行了最小化約束,因此它比假設(shè)系數(shù)陣無誤差的LS方法更加合理。
2)根據(jù)點(diǎn)云的激光反射強(qiáng)度不同的特點(diǎn),引入行向量權(quán)陣P、PX,給出P、PX的具體形式。得到的單位權(quán)中誤差小于LS方法和TLS方法,并且精度參數(shù)解更高。
3)引入列向量權(quán)陣P0,對系數(shù)陣A修改數(shù)據(jù)列而固定的常數(shù)列,并給出P0的具體形式,得到更合理的擬合模型。
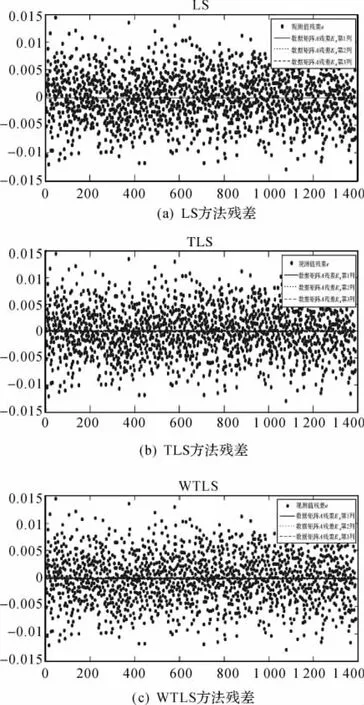
圖2 墻面數(shù)據(jù)觀測值殘差及系數(shù)陣殘差比較
[1]曹力.多重三維激光掃描技術(shù)在山海關(guān)長城測繪中的應(yīng)用[J].測繪通報,2008(4):31-40.
[2]魏木生.廣義最小二乘問題的理論和計算[M].北京:科學(xué)出版社,2006.
[3]張毅.地面三維激光掃描點(diǎn)云數(shù)據(jù)處理方法研究[D].武漢:武漢大學(xué),2008.
[4]SCHAFFRIN B,WIESER A.On Weighted Total Least-Squares Adjustment for Linear Regression[J].Journal of Geodesy,2008,82(7):415-421.
[5]王解先,季凱敏.工業(yè)測量擬合[M].北京:測繪出版社,2008.
Applying Weighted Total Least-Squares to the Plane Point Cloud Fitting of Terrestrial Laser Scanning
YUAN Qing,LOU Lizhi,CHEN Weixian
0494-0911(2011)03-0001-03
P232
B
2010-09-03
袁 慶(1986—),女,安徽宣城人,碩士生,研究方向?yàn)榇蟮販y量數(shù)據(jù)處理。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56