窄帶雷達目標特性分析技術在近距離伴飛中的應用
2011-09-21 08:41:14牛威寇鵬,2
載人航天 2011年3期
牛 威 寇 鵬,2
(1中國西安衛星測控中心 2宇航動力學國家重點實驗室)
1 引言
小衛星伴飛是載人航天飛行任務中的一項重要的科學實驗活動,伴星及軌道艙軌道測定是完成伴星對軌道艙的伴飛試驗的前提條件。雷達是進行空間目標監視的主要設備之一[1],利用雷達對伴星及軌道艙進行反射式跟蹤,可為伴飛試驗提供數據支持。此時,伴星及軌道艙視為非合作目標。非合作目標的監測與航天測控有所不同,需要考慮目標特性等問題。目前窄帶雷達觀測非合作目標時主要獲取的是測軌和雷達目標反射截面積(Radar Cross Section,RCS)數據,因此我們從軌道和RCS兩個方面分析了目標特性,根據分析結果研究了近距離伴飛中目標識別方法,在試驗中得到了驗證。
2 伴星和軌道艙目標特性分析
2.1 軌道特性分析
描述目標運動軌道的表達方式有軌道根數及目標位置、速度兩種[2]。分析目標運動特性時通常基于軌道根數,不同軌道體系定義了不同的軌道根數,本文研究了基于經典的開普勒根數的軌道特性識別技術。
經典的開普勒根數包括目標的半長軸、偏心率、軌道傾角、升交點赤經、近地點幅角、平近點角。其中半長軸、軌道傾角、升交點赤經等為慢變化軌道元素。開普勒根數又分為瞬時根數和平根數,進行識別時需分析目標瞬時位置變化情況[3]。
伴星分離后,對軌道艙和伴星進行了跟蹤。由于是非合作式跟蹤,需要根據目標特性判別目標身份,因此分析了兩個目標的軌道和RCS特性,根據特性分析結果進行了目標身份識別。
(1)基于軌道根數的識別方法分析
根據雷達測軌數據分別計算軌道艙和伴星的軌道根數,表1給出了某時刻軌道艙和伴星在J2000慣性系中的開普勒瞬時根數。由表1可見,軌道艙和伴星軌道的差別已經與定軌誤差同量級,因此利用軌道根數對二者進行識別的方法不可行。
(2)基于測站跟蹤時序的識別方法分析
我們分析了軌道艙和伴星進入設備視場的時間順序,希望借助其進行識別。表2給出了兩個不同跟蹤圈次的軌道艙和伴星的某雷達跟蹤預報情況。由表2可見,A時刻,伴星先進入設備視場,B時刻,軌道艙先進入設備視場,因此利用測站跟蹤時序對二者進行識別的方法也不可行。
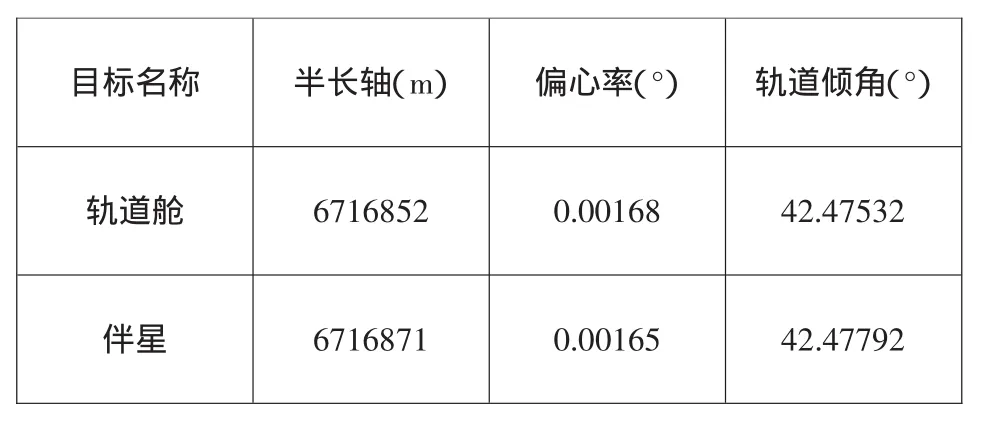
表1 軌道艙和伴星根數瞬時根數
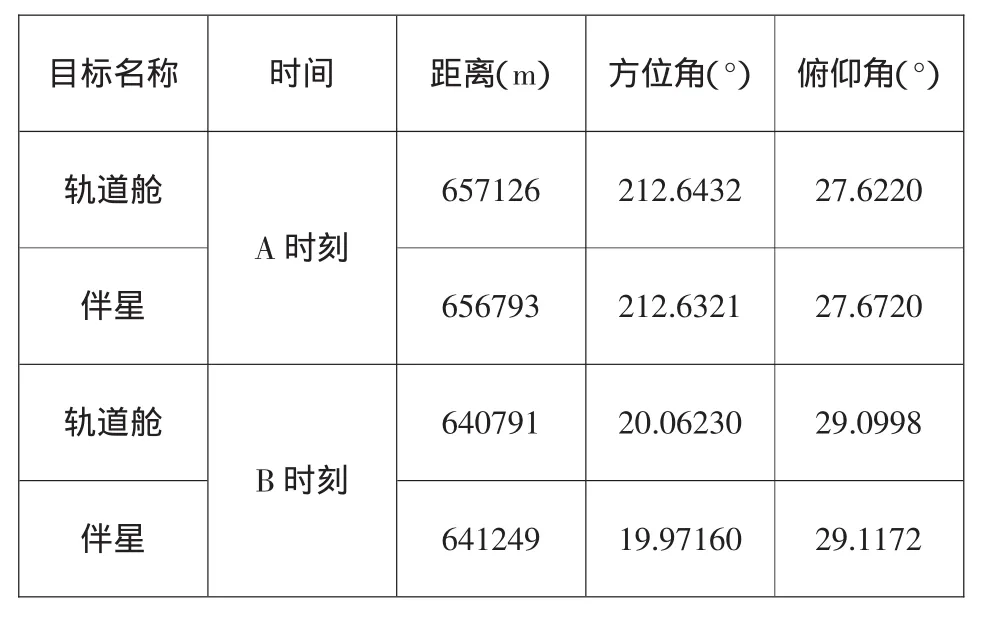
表2 軌道艙和伴星測站跟蹤預報情況
2.2 目標RCS特性分析
根據目標物理特性分析,伴星RCS均值遠小于軌道艙RCS均值。根據目標運動特性分析,伴星為姿態穩定目標,軌道艙為姿態翻滾目標。伴星RCS均值預估結果小于1m2,軌道艙RCS均值預估結果大于1m2。
根據以上分析,當不能通過軌道特性區分伴星和軌道艙時,可以通過目標RCS特性進行識別,方法如下:
(1)計算目標RCS均值;
(2)利用RCS起伏特性判斷目標姿態。
判據:目標RCS均值小于1m2且姿態穩定,識別為伴星;目標RCS均值大于1m2且姿態翻滾,識別為軌道艙。其中穩定性判別是關鍵技術,下節對算法進行詳細描述。
3 穩定性判別算法
由于周期性的翻滾使得目標的RCS反射圖具有明顯的周期性,與衛星三軸穩定姿態的RCS反射圖有明顯區別。可以提取反射圖的特征量進行分類識別[4]。直接提取RCS反射圖的方差、最大值和均值比、變異系數等特征量進行識別的效果并不理想。對RCS反射圖進行小波變換,提取小波變換后的各種特征進行了分析,經過大量實測數據驗證,發現小波變換后兩類目標的最大奇異值、最大值和均值比、方差、中心矩等特征具有可分性,利用這些特征能夠進行分類識別,試驗表明小波變換后的識別結果較好。下面對利用小波變換的識別算法進行說明。
3.1 利用小波變換的特征提取
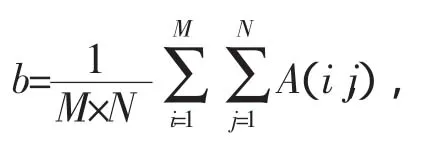
選擇對尺度參數a和時間參數b進行離散化,設窄帶雷達 RCS數據x(n),n=0,1,…,N,N為雷達觀測數據的長度,則x(n)的離散小波變換為

其中,b=1,2,…,N;a=1,2,…,M。令,選取由A提取的7個有效統計特征如下:
(1)最大值和均值之比特征

(2)最大奇異值特征
將A看作維矩陣,則分別存在一個M×M維和N×N維酉陣U和V,使得A=UΣVH,其中上標H表示矩陣的共軛轉置,Σ是一個M×N維對角矩陣,其主對角線上的元素是非負的,并按下列順序排列:σ11≥σ22≥…≥σhh≥0,式中h=min(M,N)。則最大奇異值特征為:

(3)方差特征
方差特征為:

(4)中心矩特征

分別令(p,q)=(2,2)、(2,4)、(4,2)、(4,4),可以提取中心矩特征t4=u22,t5=u24,t6=u42,t7=u44。
3.2 神經網絡判別
考慮到分類識別和工程應用的需求,試驗選取了算法簡單,便于實現的BP(Back Propagation)神經網絡。由于提取的7種小波變換特征值之間相差較大,直接作為BP神經網絡的輸入,網絡不收斂。根據實際情況,對特征值進行了歸一化處理,使用歸一化處理后的特征值進行識別,使用基本的BP神經網絡算法就可以達到較好的識別效果,網絡收斂速度較快。
使用BP神經網絡首先需要對其進行訓練,使其通過對一定數量的樣本數據進行學習后,具備識別新樣本數據的能力。實驗中選取三層BP神經網絡,設輸入層有n個神經元,隱含層有p個神經元,輸出層有m個神經元,根據特征提取結果和識別要求,取n=7,p=5,m=2。xi表示輸入層第i個神經元,yh表示隱含層第h個神經元,zj表示輸出層第j個神經元,wih表示輸入層第i個神經元和隱含層第h個神經元之間的連接權值,whj表示隱含層第h個神經元和輸出層第j個神經元之間的連接權值。
隱藏層第h個神經元的輸入為:
其中,θh為結點門限。
隱藏層第h個神經元的輸出為:

采用S形壓縮函數:

輸出層第j個神經元的輸入加權和為:

輸出層第j個神經元的輸出為:

誤差函數采用:

其中,tj為要求的理想輸出。
為使誤差函數值最小,用梯度下降法求得優化的權值。權值修正量先從輸出層開始修正,然后依次修正前層權值。網絡任意層的連接權值修正量可以寫成如下一般形式:

其中,yp代表輸入端點實際輸入,δq表示輸出端點的誤差。δq的含義由具體的層決定,η為訓練速率。
4 試驗結果
跟蹤試驗中對目標特性進行了分析,部分結果如下:
4.1 軌道艙特性測量和分析結果

表3 B型號雷達跟蹤目標RCS均值計算結果

圖1 A型號雷達RCS時間序列曲線
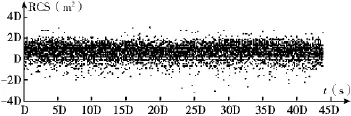
圖2 B型號雷達RCS時間序列曲線
穩定姿態結果設為0,翻滾姿態結果設為1,取兩類目標輸出中值0.5為閾值。
根據RCS均值計算結果和姿態識別結果判斷,跟蹤目標為軌道艙。

表4 A型號雷達RCS序列識別結果

表5 B型號雷達RCS序列識別結果
4.2 伴星特性測量和分析結果

表6 B型號雷達跟蹤目標RCS均值計算結果

圖3 A型號雷達RCS時間序列曲線
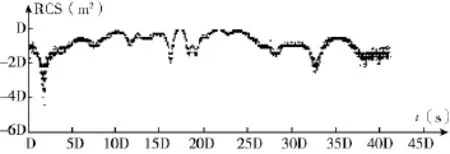
圖4 B型號雷達RCS時間序列曲線
穩定姿態結果設為0,翻滾姿態結果設為1,取兩類目標輸出中值0.5為閾值。
根據RCS均值計算結果和姿態識別結果判斷,跟蹤目標為伴星。

表7 A型號雷達RCS序列識別結果
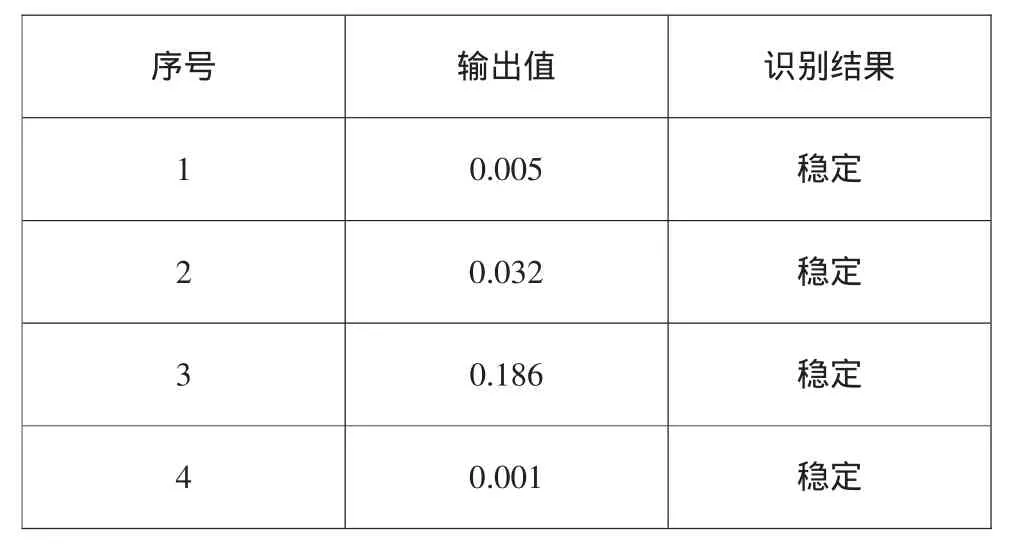
表8 B型號雷達RCS序列識別結果
5 結論
近距離伴飛實驗中,由于伴星和軌道艙目標相對距離較近,兩目標進入設備視場的時間順序也不能確定,導致常用的軌道根數和測站跟蹤時序識別法不能對兩者加以區分。本文通過分析目標的物理特性及姿態特性,提出了使用RCS均值及姿態穩定判別的識別方法,識別出伴星和軌道艙。但是窄帶雷達不能得到目標的細節信息,后續工作將利用不同類型雷達的特性測量結果,進一步研究空間目標的融合識別方法,更好的為我國航天試驗服務。
[1]柳仲貴.近地空間目標監視網設計[J].飛行器測控學報,2000,19(4):9-17.
[2]李濟生.人造衛星精密軌道確定[M].北京,解放軍出版社,1995:76-78.
[3]Qisheng Sui,Jianping Yuan,Wei Niu,and Li Shaoming.A Method of Space Object Recognition Based on Threshold Estimating[C],ISSCAA2010,Haerbing,China,pp.838-840,6.8-6.10,2010.
[4]Wei Niu,Shaoming Li,Rongzhi Zhang.Method for Determining Spacecraft Attitude Stability based on RCS[C].61st International Astronautical Congress,Prague,Czech Republic,IAC-10-A6.1.3,9.27-10.1,2010.