超短基線定位原理及校正方法研究
2011-09-24 08:11:24王德剛韓富江來(lái)向華茍諍慷傅曉明
海洋科學(xué) 2011年2期
關(guān)鍵詞:系統(tǒng)
王德剛, 韓富江, 來(lái)向華, 茍諍慷, 傅曉明
(國(guó)家海洋局 第二海洋研究所, 浙江 杭州 310012)
超短基線定位原理及校正方法研究
王德剛, 韓富江, 來(lái)向華, 茍諍慷, 傅曉明
(國(guó)家海洋局 第二海洋研究所, 浙江 杭州 310012)
通過(guò)探討超短基線和 GPS技術(shù)相結(jié)合的三維立體定位原理, 分析超短基線定位誤差來(lái)源, 如安裝偏差、聲速誤差、船姿態(tài)變化引起的偏差等, 利用以最小二乘法為理論基礎(chǔ)的動(dòng)態(tài)校正法對(duì)超短基線定位誤差進(jìn)行了修正, 將校正前后的定位數(shù)據(jù)標(biāo)準(zhǔn)偏差和剩余偏差處理后對(duì)比發(fā)現(xiàn), 這種方法可以極大地提高水下目標(biāo)定位的精度, 減少定位的誤差, 這也在實(shí)際應(yīng)用中得到驗(yàn)證。實(shí)現(xiàn)對(duì)超短基線定位數(shù)據(jù)的有效校正將極大地?cái)U(kuò)展超短基線在海洋科學(xué)研究和海洋勘探開(kāi)發(fā)活動(dòng)水下定位領(lǐng)域的應(yīng)用,對(duì)提高水下目標(biāo)的定位精度具有重要的現(xiàn)實(shí)意義。
超短基線系統(tǒng); 水下定位; 誤差分析; 動(dòng)態(tài)校正
近年來(lái), 隨著海洋科學(xué)研究和海洋勘探開(kāi)發(fā)活動(dòng)對(duì)數(shù)據(jù)的精度要求越來(lái)越高, 需要對(duì)水下工作的拖體(聲納拖魚(yú)、水下機(jī)器人等)進(jìn)行精確定位。當(dāng)前主要采用兩種手段進(jìn)行水下定位, 一種是LAYBACK方式[1], 方法較簡(jiǎn)單, 但定位效果不理想,主要由于拖體與 GPS天線的方位和距離偏差受船速、航向和流速等因素影響較大; 另一種是利用水聲技術(shù)進(jìn)行水下定位, 可以達(dá)到較高的精度要求。
高精度水下聲學(xué)定位系統(tǒng)是許多高新技術(shù)的集成, 根據(jù)基線長(zhǎng)度的不同以及工作原理和作用范圍的區(qū)別, 可以分為長(zhǎng)基線(long base line)、短基線(short base line)和超短基線(ultra short base line, 簡(jiǎn)稱USBL) 3種定位技術(shù)[2]。長(zhǎng)基線方法定位精度高,但設(shè)備龐大, 布放過(guò)程復(fù)雜; 短基線定位方法的設(shè)備和布放較簡(jiǎn)單, 但精度不高; 超短基線水聲定位系統(tǒng)以其成本低、便攜性強(qiáng)、靈活性高和操作簡(jiǎn)單等優(yōu)點(diǎn),在海洋工程、海洋礦產(chǎn)資源、水下考古、海洋國(guó)防建設(shè)等領(lǐng)域中得到了廣泛的應(yīng)用。由于超短基線定位存在一定的偏差而影響水下目標(biāo)定位的精度, 為減小超短基線的定位誤差, 本文利用以最小二乘法為理論基礎(chǔ)的動(dòng)態(tài)校正法對(duì)定位數(shù)據(jù)進(jìn)行了處理, 通過(guò)實(shí)例驗(yàn)證這種方法是有效和可行的, 對(duì)提高水下目標(biāo)定位的精度具有重要的意義。
1 超短基線系統(tǒng)定位原理
超短基線定位系統(tǒng)由發(fā)射基陣、應(yīng)答器、接收基陣組成。收發(fā)基陣安裝在同一探頭上, 應(yīng)答器固定在水下拖體上。系統(tǒng)通過(guò)測(cè)定聲單元的相位差來(lái)確定換能器到目標(biāo)的相對(duì)方位角; 換能器與目標(biāo)的距離通過(guò)測(cè)定聲波傳播的時(shí)間, 再用聲速剖面修正波束線, 最終確定聲基陣與水下拖體目標(biāo)的相對(duì)距離,從而確定目標(biāo)的相對(duì)位置(圖1)。
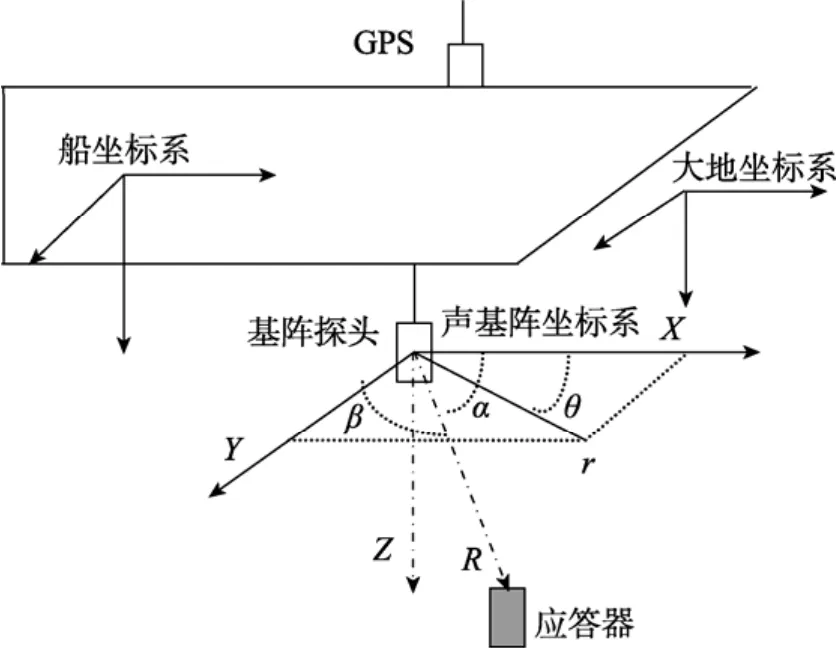
圖1 超短基線水下定位原理圖及坐標(biāo)系統(tǒng)Fig. 1 USBL underwater positioning schematic diagram and related coordinate systems
基陣坐標(biāo)系中,θ為目標(biāo)方位角,r為目標(biāo)水平斜距,α,β,R為測(cè)量值, 可計(jì)算目標(biāo)的相對(duì)位置參數(shù)[3]:

超短基線定位系統(tǒng)要測(cè)量水下目標(biāo)的絕對(duì)位置(地理坐標(biāo)), 需將超短基線系統(tǒng)與DGPS系統(tǒng)、船姿態(tài)傳感器系統(tǒng)及電羅經(jīng)系統(tǒng)結(jié)合在一起(圖 2), 其中DGPS系統(tǒng)用于測(cè)得船只所在位置大地坐標(biāo), 運(yùn)動(dòng)傳感器和電羅經(jīng)用于獲取測(cè)量船每個(gè)時(shí)刻的橫搖(roll)、縱搖(pitch)及船艏向(yaw)資料, 用于實(shí)時(shí)校正超短基線的姿態(tài), 安裝后需精確測(cè)量各個(gè)傳感器之間的三維距離, 根據(jù)傳感器之間的位置關(guān)系, 進(jìn)行坐標(biāo)轉(zhuǎn)換, 最終可實(shí)現(xiàn)水下運(yùn)動(dòng)拖體的三維實(shí)時(shí)高精度定位。
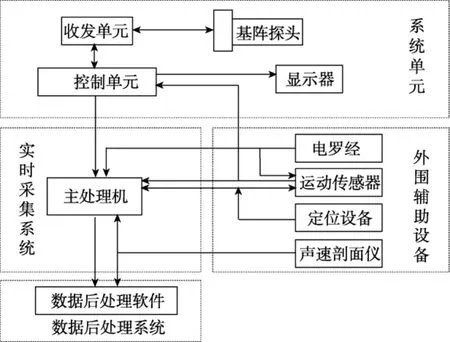
圖2 超短基線水下定位系統(tǒng)框架圖Fig. 2 USBL underwater positioning system frame diagram
在整個(gè)集成系統(tǒng)中需建立 3個(gè)坐標(biāo)系, 大地坐標(biāo)系、船坐標(biāo)系及聲基陣坐標(biāo)系(圖1)。以向下與船甲板垂直方向?yàn)閆軸, 船艏方向?yàn)閄軸, 依照右手原則建立船坐標(biāo)系, 且船坐標(biāo)系與聲基陣坐標(biāo)系原點(diǎn)為同一點(diǎn), 這樣可避免坐標(biāo)的平移產(chǎn)生, 有利于下文的計(jì)算與坐標(biāo)轉(zhuǎn)換。聲基陣探頭在船坐標(biāo)系中的值為再利用船上羅經(jīng)和運(yùn)動(dòng)傳感器可得到的橫搖角αm、縱搖角mβ、船航向角mλ, 聲基陣探頭在大地坐標(biāo)中的位置計(jì)為根據(jù)坐標(biāo)旋轉(zhuǎn)原則[4]確定聲基陣大地坐標(biāo)值為:

其中
在聲基陣探頭理想安裝狀態(tài)下, 利用 USBL定位結(jié)果及水下運(yùn)動(dòng)目標(biāo)的方位角, 通過(guò)式(3)可將水下目標(biāo)的位置信息轉(zhuǎn)換到大地坐標(biāo)系統(tǒng)中, 得到水下目標(biāo)的絕對(duì)位置。
2 誤差分析與系統(tǒng)校正
2.1 誤差分析
影響超短基線定位系統(tǒng)精度的主要因素有系統(tǒng)自身誤差、海洋環(huán)境參數(shù)測(cè)量誤差、波浪引起的船姿態(tài)偏差及聲學(xué)基陣帶來(lái)的偏差等[5]。
聲學(xué)基陣探頭、DGPS、電羅經(jīng)等儀器本身的絕對(duì)誤差, 按照儀器相關(guān)校正方法進(jìn)行校正即可; 海洋環(huán)境參數(shù)測(cè)量誤差主要是水體聲速剖面的變化所引起的距離測(cè)量偏差, 需使用聲速剖面儀得到工作水域的聲速變化曲線, 在計(jì)算水下目標(biāo)距離時(shí)進(jìn)行校正; 船姿態(tài)引起的偏差校正,主要是利用運(yùn)動(dòng)傳感器測(cè)量得到船橫搖、縱搖及電羅經(jīng)得到的船艏向數(shù)據(jù), 實(shí)時(shí)校正由于波浪引起的船姿態(tài)變化對(duì)基陣探頭的影響。需要特別指出的是, 聲學(xué)基陣安裝偏差是超短基線定位系統(tǒng)的主要誤差來(lái)源, 在使用前必須進(jìn)行校正。
2.2 系統(tǒng)校正
超短基線定位系統(tǒng)的聲學(xué)基陣在測(cè)量船上安裝是有方向性的, 由于在安裝時(shí), 基陣坐標(biāo)系與船心坐標(biāo)系之間不可能完全重合, 存在系統(tǒng)性偏差, 要保證獲取高精度的定位數(shù)據(jù), 必須進(jìn)行校準(zhǔn)改正。根據(jù)基陣安裝偏差的方向可以分為橫向偏差(roll error)、縱向偏差(pitch error)和船向偏差(yaw error) (圖3)。
聲基陣安裝偏差校正應(yīng)在工作區(qū)域附近進(jìn)行,將應(yīng)答器(信標(biāo))連接重塊釋放到海底, 以應(yīng)答器的位置為圓心, 水深為半徑, 設(shè)計(jì)6條測(cè)線, 測(cè)線的長(zhǎng)度一般為水深的2~3倍(圖4), 安裝聲學(xué)基陣探頭的船只按照設(shè)計(jì)的 6條測(cè)線的順序航行, 船在航行時(shí)盡量保持固定航向, 當(dāng)船到達(dá)測(cè)線起點(diǎn)時(shí), 開(kāi)始記錄數(shù)據(jù), 這樣可以在每個(gè)航跡位置確定基陣坐標(biāo)下的應(yīng)答器位置, 同時(shí)要記錄航跡位置處的 DGPS位置信息和船姿態(tài)數(shù)據(jù)。
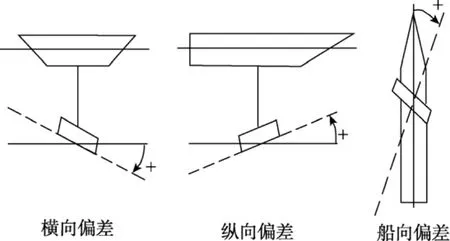
圖3 超短基線聲基陣安裝偏差Fig. 3 The installation errors of USBL probe
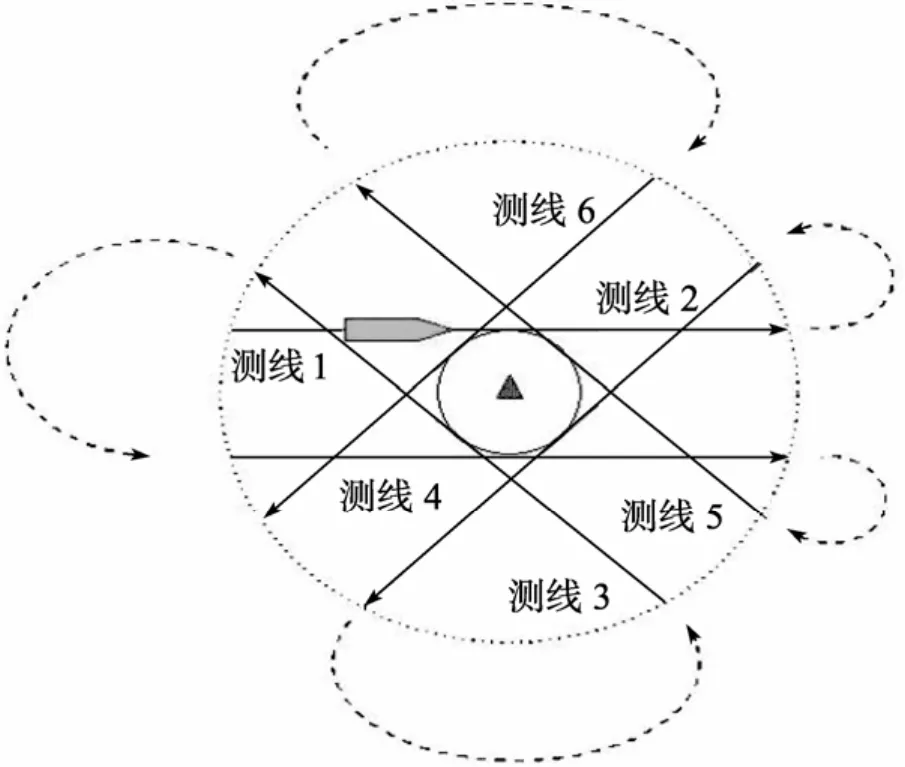
圖4 超短基線安裝校正測(cè)線布設(shè)圖Fig. 4 The lateral line diagram of USBL installation correction
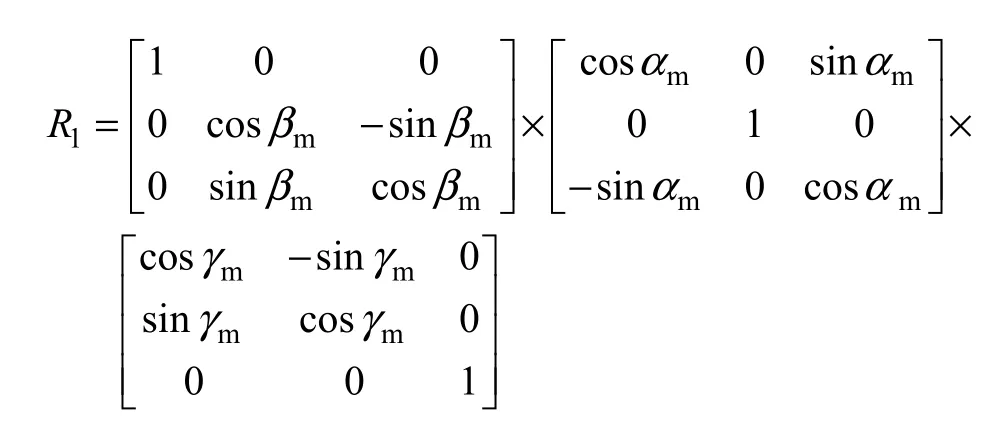
R1為聲學(xué)基陣向大地坐標(biāo)變換的旋轉(zhuǎn)矩陣,R2為聲學(xué)基陣坐標(biāo)系向船坐標(biāo)系轉(zhuǎn)換的旋轉(zhuǎn)矩陣。其中:
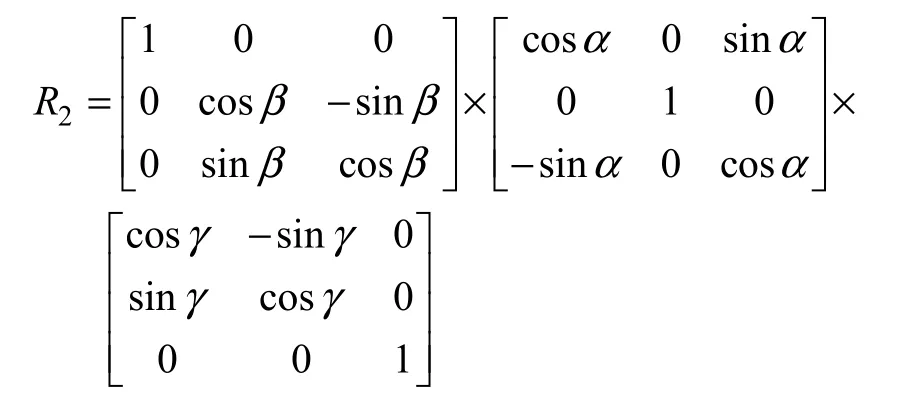
為安裝偏角的旋轉(zhuǎn)矩陣, (α,β, )γ分別為聲基陣安裝的橫向偏差、縱向偏差及船向偏差。
由最小二乘法可以得到由探頭安裝偏差所帶來(lái)的旋轉(zhuǎn)矩陣R2, 即可求出姿態(tài)角的偏差(α,β, )γ[6-8]。
3 實(shí)例分析
國(guó)家海洋局第二海洋研究所承擔(dān)的亞洲內(nèi)環(huán)海底光纜系統(tǒng)海洋路由調(diào)查項(xiàng)目中, 使用了HIPAP350P超短基線定位系統(tǒng)用于側(cè)掃聲納拖魚(yú)的水下定位。在南海工作區(qū)域, 利用上述方法對(duì)超短基線的安裝偏差進(jìn)行了校正, 總共采集數(shù)據(jù)918組,使用數(shù)據(jù)772組, 占整個(gè)數(shù)據(jù)的84%, 利用上述系統(tǒng)動(dòng)態(tài)校正方法得到以下結(jié)果: 超短基線的橫向偏差 為 ?0.952°, 縱 向 偏 差 為 2.136°, 船 向 偏 差 為3.584°。
將校正后和校正前的定位數(shù)據(jù)對(duì)比(圖5)可以發(fā)現(xiàn), 校正后的數(shù)據(jù)偏差都集中在零點(diǎn)附近, 通過(guò)數(shù)理統(tǒng)計(jì)可得X,Y,Z的標(biāo)準(zhǔn)偏差分別為4.31, 4.31和5.87 m, 由剩余偏差統(tǒng)計(jì)圖可得知其基本服從標(biāo)準(zhǔn)正態(tài)分布, 校正效果良好。其后工作中利用校正的HIPAP350P進(jìn)行水下側(cè)掃聲納拖魚(yú)的定位, 通過(guò)多種資料對(duì)比結(jié)果表明, 其定位效果良好, 這也證明了該校正方法的有效性。
4 結(jié)論
超短基線水聲定位系統(tǒng)和差分式全球衛(wèi)星定位系統(tǒng)(DGPS)組成的測(cè)量系統(tǒng)可以有效地解決水下和海底目標(biāo)的高精度定位問(wèn)題。整個(gè)系統(tǒng)的構(gòu)成簡(jiǎn)單, 操作方便,測(cè)距精度高, 不需要組建水下基線陣; 系統(tǒng)的主要缺點(diǎn)是仍需要做大量的校準(zhǔn)工作, 測(cè)量目標(biāo)的絕對(duì)位置精度依賴于外圍設(shè)備精度——全球差分定位系統(tǒng)(DGPS)、電羅經(jīng)(GYRO)、運(yùn)動(dòng)傳感器(VRU)等。但隨著多種類型基線集成使用系統(tǒng)(如超短基線和短基線、長(zhǎng)基線組合定位)、多傳感器集成技術(shù)的出現(xiàn)(如法國(guó) IXSEA公司的GAPS 超短基線系統(tǒng), 探頭內(nèi)集成了羅經(jīng)、運(yùn)動(dòng)傳感器等設(shè)備)及更優(yōu)秀的數(shù)據(jù)處理算法[9](如卡爾曼濾波算法)的使用, 確保了系統(tǒng)數(shù)據(jù)的高精度, 可以更大限度的發(fā)揮超短基線在水下目標(biāo)位置定位中的應(yīng)用。
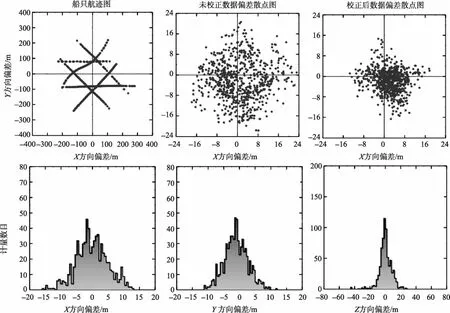
圖5 安裝偏差校正結(jié)果統(tǒng)計(jì)圖Fig. 5 The stacistical graph of installation error correction
[1] 隋海琛, 劉彥祥, 姜曉暉. 海洋調(diào)查中水下目標(biāo)位置的確定[J]. 海洋測(cè)繪, 2004, 24(3): 32-34.
[2] 李守軍, 包更生, 吳水根. 水聲定位技術(shù)的發(fā)展現(xiàn)狀與展望[J].海洋技術(shù), 2005, 24(1): 130-135.
[3] 喻敏, 惠俊英, 馮海泓, 等. 超短基線系統(tǒng)精度改進(jìn)方法[J]. 海洋工程, 2006, 24(1): 86-91.
[4] 張煒, 王大成. 水下和海底大地坐標(biāo)的精確測(cè)量[J].應(yīng)用科技, 2003, 30(9): 19-21.
[5] Philip D R. An evaluation of USBL and SBL acoustic systems and the optimisation of methods of calibration[J].The Hydrographic Journal, 2003, 108:10-25.
[6] 鄭翠娥, 孫大軍, 張殿倫, 等. 超短基線定位系統(tǒng)安裝誤差校準(zhǔn)技術(shù)研究[J]. 計(jì)算機(jī)工程與應(yīng)用, 2007,43(8): 171-173.
[7] Takuji Y, Masataka A. Error evaluation in acoustic positioning of a single transponder seafloor crustal deformation measurements[J].Earth, Planets and Space,2002, 54(9): 871-881.
[8] Angelis C M, Whitney J. Adaptive calibration of an autonomous underwater vehicle navigation system [J].IEEE, 2000, 1: 273-275.
[9] 郭紀(jì)捷. 水下拖體聲學(xué)超短基線定位測(cè)量及其卡爾曼濾波技術(shù)[J]. 海洋技術(shù), 2002, 21(1): 7-11.
Received: Aug., 3, 2009
Key words:ultra short base line; underwater positioning; error analysis; dynamic correction
Abstract:Three dimension location theory based on USBL and GPS principle was discussed and also the resources of USBL positioning data errors such as installation error, acoustic error and the error caused by ship attitude movement were analyzed in the paper. Dynamic correction which based on the least square method was used to modify the USBL positioning errors. Comparing the standard deviation and residual analyzed on the pre and post positioning data, the method improved the underwater positioning precision to a great extent which was proved in practice. The application of USBL positioning data modification in effect would expand the USBL usage in the marine investigation science area and also had important practical significance in the improving of underwater positioning precision.
(本文編輯:劉珊珊)
The localization theory and corresponding correction methods of USBL
WANG De-gang, HAN Fu-jiang, LAI Xiang-hua, GOU Zheng-kang, FU Xiao-ming
(Second Institute of Oceanography, State Oceanic Administration, Hangzhou 310012, China)
P229
A
1000-3096(2011)02-0077-05
2009-08-03;
2010-12-13
國(guó)家自然科學(xué)基金資助項(xiàng)目(40476032); 國(guó)家海洋局第二海洋研究所基本科研業(yè)務(wù)費(fèi)專項(xiàng)(JG0911, JG0913)
王德剛(1981-), 男, 山東德州市人, 碩士, 主要從事海洋工程地球物理技術(shù)研究, E-mail: DeGang_W@163.com
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
