便攜式無線電測向系統的軟件設計與實現
2011-10-09 06:28:54彭玉玲劉元安劉凱明
中國科技信息 2011年2期
彭玉玲 劉元安 劉凱明
北京郵電大學 100876
便攜式無線電測向系統的軟件設計與實現
彭玉玲 劉元安 劉凱明
北京郵電大學 100876
引言
無線頻譜是非可再生資源,對無線頻譜資源的合理利用和有效監管一直是各國無線電管理部門的首要工作。調頻廣播承載著各省交通信息和氣象預報等多種公眾服務信息的廣播業務,在人民的日常生活和工作中具有不可替代的作用。但是部分組織或個人出于各種目的,在未經允許的情況下,私自發射調頻信號,嚴重擾亂了調頻廣播的正常運行。
1、用戶需求分析
設計一個界面友好、操作方便的便攜式測向系統軟件,配合相應的硬件設備,能實現以下功能:
系統分為向導式和普通操作模式,方便用戶進行操作;
向導式將對用戶的操作步驟進行詳細的指導;
普通式則是熟練使用的用戶的另外一種使用方式,更加靈活;
系統能實時在地圖上面顯示本系統的位置;
接收用戶輸入,執行掃描測向的操作,并向用戶顯示處理結果;
測向結果將會繪制到地圖上,信號強度將會以可視的形式進行實時顯示。
系統支持聯機測向,即系統可以把自己的測向結果發送給其他的系統。
2、開發環境及測向方案選擇
要設計簡單友好的界面系統,可以在Visual Studio系列里面進行開發工作,本系統由于要使用GIS地圖信息管理庫里面的接口,采用了Visual Studio 2005開發環境。由于本系統不僅要界面設計,底層也要通過串口和硬件系統進行交互,因此選用的C++語言,并基于MFC類庫來編寫程序。
對于測向算法的選擇,根據用戶需求及對現有幾種典型算法的分析[1],可以發現,雖然干涉儀式測向的實現難度較大,但是它同時具有很高的測向靈敏度和準確度,對設備的要求也不高,可以考慮作為首選算法。
與其他測向方法相比,幅度比較式測向對系統要求最低,但也具有最低的性能,可作為備用算法。
干涉儀測向的結果是一條指向電臺的方向線,由于存在測向精度的問題,多點測向后,不會總是交到一個點上,但是可以根據這些測向線,得出電臺的初步搜索范圍,其原理如圖1所示:

圖 1 測向原理圖
然后在這個搜索區域,利用幅度比較式算法,最終定位電臺的位置。
3、軟件設計及實現
3.1 總體設計
整個測向機系統分為三大部分:上位機(即軟件系統)、下位機(即硬件系統)和天線部分。圖2是系統的總體設計。本文主要關注上位機,即軟件的設計與實現。軟件系統主要由用戶圖形界面、綜合控制模塊、工程管理模塊、GPS定位管理模塊、掃描測向模塊、聯機測向模塊和地圖信息管理模塊六大部分組成。

圖 2 系統整體架構
3.2 詳細設計
3.2.1 用戶圖形界面
界面上面是標題欄和菜單欄,左邊區域初始空白,幅度比較式測向時用來顯示信號強度,右側為地圖操作和顯示區域。
根據測向系統的需求,對于向導式測向的界面設計應該是系統啟動時自動彈出向導界面,提示用戶新建一個工程測向或者繼續上次測向。然后是掃描界面,提示用戶進行自動掃描或手動掃描。最后是給出掃描結果,針對非法電臺進行測向操作。
3.2.2 綜合控制模塊
這個模塊具有神經中樞的作用,它將上層的界面顯示與底層的功能實現聯系起來,并協調各模塊的工作,使整個系統能很好地完成測向任務。在系統初始化的時候,這個模塊負責初始化各模塊。在系統運行過程中,接收從用戶圖形界面傳過來的操作指令,解析并調用相關的底層模塊來執行命令,對于底層模塊的處理結果,也及時的讀取并反饋給用戶圖形界面顯示出來。
3.2.3 工程管理模塊
工程管理模塊的核心作用是實現數據的存儲,當用戶建立一個新的測向工程,用戶繼續上次的測向操作,用戶測向得到結果時,這個模塊負責從工程文件里面讀出相應的測向數據,并及時更新這些數據。它能使用戶后期對所測的各種數據進行查詢分析,有利于數據的統計工作。
3.2.4 GPS定位管理模塊
由于本系統同時需要利用移動通信網絡收發短信進行聯機測向的功能,通過分析及比較,在芯片選擇上選定了上海SIMCOM公司生產的SIM508模塊[2]。該模塊同時集成了GSM和GPS兩種模塊,且具有非常小的體積和重量,性價比較高,非常適合應用于本系統。
定位管理模塊在程序運行期間,一直在后臺執行并更新位置信息。模塊通過計算機的串口與GPS模塊進行交互來讀取位置信息。
3.2.5 掃描測向模塊
1)掃描
在具體的掃描線程的執行中,如果是自動掃描,則將起止頻率和步長轉換為十六進制數,加上命令開始識別符和結束符,一起寫入相應的串口,最終被硬件設備接收到,然后反饋這個范圍的以步長為間隔的頻點的信號強度。程序收集完這些強度信息后,開始分析可能存在電臺的頻點。
從掃描結果分析,電臺所在頻點位置會出現一個凹形的突起,而突起的第一個峰所在的頻率就是電臺的頻點。掃描模塊針對這個特點就可以設計相應的算法,找到凹形突起后,就可以確定電臺頻點。
2)干涉儀算法測向[3]
本設計采用的是四單元、雙通道的測向方法,測向原理圖如圖3所示,其中d為陣元之間的距離,θ為信號到達的方向,λ是載波波長。由于相位干涉儀測向的角度只能在±180°范圍內,由式(1)可知,當d<λ/2時,對于信號入射角θ在±90內取值時,其對應相位差在±180以內,相位值與入射角度值一一對應;當d>λ/2時,對于信號入射角θ在±90內取值時,其實際相位差可能超過±180的范圍,此時同一個相位值可能對應多個入射角度值,這就是“相位模糊”。所以d必須小于λ/2,否則不能保證實際的方向角與測量的方向角一一對應,即一個測定的φ可以計算出兩個或兩個以上的θ,這當然是不允許的。為了克服相位模糊問題,本系統采用的天線基線之間間距為λ/4。
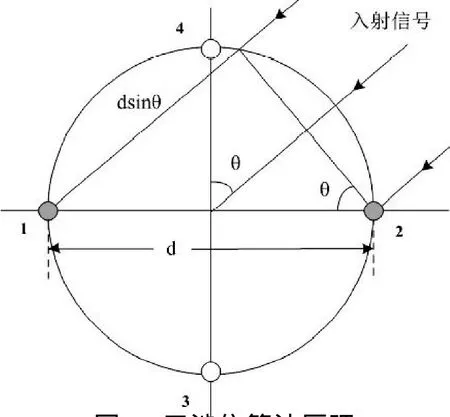
圖 3 干涉儀算法原理
若有一平面波從與天線視軸夾角為θ的方向到達間距為d的兩個測向天線,則在知道信號頻率f的情況下(波長λ=c/f,c為光速),兩個天線1、2接收到的相位差為

因此,只要測量出ψ12就能算出信號到達方向角θ。
如果兩個信道的響應完全一致,接收機輸出的相位差仍為φ,則由接收機采樣接收到的信號
干涉測向線程函數負責從串口讀入兩個天線陣1、2采樣數據,然后求其希爾伯特變換,得到正弦相關的表達式,就可以利用三角函數公式來求得相位差。
由公式(6)

(4)
可以求得兩個天線陣元之間信號的相位差的正弦值及相位

(7)
然后根據公式(1)可以得出方向角。為了克服鏡像模糊問題,系統還同時收集了3、4天線陣元的信號進行分析,使計算出的來的角度更加準確。
3)幅度比較式算法
幅度比較式測向[4]比較簡單,就是從硬件設備不斷讀取某特定頻點的信號強度值,并實時刷新,這樣在上層界面會根據這個強度值來顯示當前天線所在方向的接收到的信號質量。
3.2.6 聯機測向模塊
這個模塊處理本測向機和其他聯合測向的機器之間通信的模塊。系統采用的是發送短消息的模式。
如果是要進行聯機測向,應該是一個小組三個人,每人持一臺測向機去到不同的地方。三臺機器掃描可能會確定出不同的非法頻點,然后對各自掃描出的這個頻點進行干涉式測向,這樣就會造成無法協作完成一個測向的任務。因此,系統設計為,最快測完一次干涉式測向,并把結果發給其他兩臺機器的測向機自動成為主測向機,另外兩臺從測向機在收到主測向機的測向請求和測向結果后,馬上停止自己的測向任務,轉而保存主測向機的測試結果,并根據接收到的頻點信息,開始自己的測向。從測向機測出結果后,立即把結果發給其他兩臺測向機,這樣三臺測向機同時擁有了三次干涉式測向結果,如果條件滿足,一個圓形的搜索范圍將會自動繪制在地圖上。
3.2.7 地圖信息管理模塊
這個模塊主要是管理界面上面對地圖部分的操作,包括顯示測向系統所在地地圖,顯示測向機的具體位置、顯示干涉式測向的結果、提供地圖的縮放、拖動等簡單操作。
4、實地測試
以單機測試為例,三次干涉儀測試結果如下圖4右側地圖區域所示所示。
其中的紅色圓點為當前測向機所在位置,紅色圓圈為三次測向結果出來后自動繪制出來的搜索區域。進入搜索區域后,使用幅度比較式算法,可以實時觀察信號強度,如圖4左側柱形圖區域所示。

圖 4 幅度比較式測向界面
5、總結
本文給出了一種綜合多功能的測向系統的軟件設計方案及實現方法。單機測向可以采取多點測試的方法,而多機可以聯合測試。在綜合運用相關干涉儀算法和幅度比較式算法的基礎上,使用戶能很方便地使用并找到要尋找的電臺發射地。
[1]李鵬.雙通道相關干涉儀測向系統研究[學位論文].西安:西安電子科技大學.2009
[2]SIM508_HD_V2.08 [Datasheet], SIM TECHNOLOGY, http://www.sim.com.
[3]梁雙港.基于相位干涉儀測向算法的定位技術研究[D]. 中國優秀博碩士學位論文全文數據庫 (碩士).2006,(08) .
[4]劉利軍.淺論無線電測向技術及其應用.中國高新技術企業.2009.7:7~8
國家自然科學基金資助項目 60802033以及60873190
10.3969/j.issn.1001-8972.2011.02.041
彭玉玲,籍貫湖南,北京郵電大學在讀碩士,研究方向:無線通信。
調頻廣播承載著各省交通信息和氣象預報等多種公眾服務信息的廣播業務,在人民的日常生活和工作中具有不可替代的作用。但是部分組織或個人出于各種目的,在未經允許的情況下,私自發射調頻信號,嚴重擾亂了調頻廣播的正常運行。本文介紹了一種適用于調頻頻段的便攜式無線電監測設備的軟件設計與實現,主要介紹了無線測向的基本原理,采用相關干涉式算法與幅度比較式算法相配合的方式進行測向,以及單機測向和聯機測向的方法,并詳細分析了測向程序的基本流程和具體實現。關鍵詞
測向;相關干涉儀;幅度比較式;軟件設計
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12