渦流陣列檢測修正C掃描成像技術研究
2011-10-19 12:47:20羅飛路侯良潔
傳感技術學報 2011年8期
劉 波,羅飛路,侯良潔
(國防科技大學機電工程與自動化學院,長沙 410073)
渦流陣列(Eddy Current Array,ECA)檢測技術是渦流無損檢測技術中新興的技術分支,它是通過檢測傳感器結構的特殊設計,運用計算機技術和數字信號處理技術,實現對材料和零部件的快速、有效地檢測。由于具有高空間分辨率、無需自動掃描裝置和可視化等優勢,該技術已廣泛應用于飛機機體、飛機輪轂、核電站蒸發器傳熱管、管棒條型材、平面大面積金屬板材、焊接縫隙等領域的無損檢測中[1-3]。渦流陣列檢測技術已成為當前渦流檢測技術和傳感器技術中的重要發展方向。
渦流陣列成像技術是陣列檢測技術的重要組成部分,是實現缺陷快速、有效檢測不可或缺的關鍵技術。常用的渦流陣列成像方法一般可分為阻抗平面圖、帶狀視圖和 C掃描視圖[4-5]。阻抗平面圖是將阻抗幅值和相位變化進行二維顯示。帶狀視圖將阻抗變化曲線隨掃描時間變化進行二維顯示。用渦流陣列檢測阻抗變化量的大小來調節圖像的灰度,阻抗變化量越大,則圖像顏色越深,表示受檢件損傷越嚴重。據此可以做出缺陷的俯視圖,稱為C掃描圖像,C掃描圖像采用偽三維顯示技術。C掃描圖像在無須無損檢測人員大量先驗知識的條件下,可以快速準確地判斷受檢件有無缺陷、缺陷的大致位置等信息,為常規檢測提供便利。
渦流陣列C掃描圖像是渦流陣列檢測方法定性判斷受檢件有無缺陷和缺陷特征信息的重要依據,但是,渦流陣列C掃描成像存在如下問題:(1)C掃描成像方法中線圈單元點擴展函數卷積效應導致缺陷圖像模糊[6],檢測人員無法較為精確判斷缺陷的位置、長度、方向等信息;(2)激勵檢測式渦流陣列檢測中C掃描成像紅色標識的缺陷區域與實際缺陷區域存在位置差。本文結合渦流陣列特征提取方法和圖像處理方法,提出了可以較為準確反映裂紋位置、長度、方向等特征信息的渦流陣列修正C掃描成像。
1 渦流陣列無損檢測平臺
1.1 渦流陣列檢測硬件平臺
渦流陣列檢測硬件系統如圖1所示,分為陣列傳感器、DDS信號發生電路、運放和功放電路、線圈單元陣列的模擬開關陣、正交鎖定放大電路和數據采集處理顯示五部分。DDS發生單頻、雙頻或脈沖信號,經濾波、放大與傳感器線圈單元陣列的模擬開關陣連接,對陣列傳感器線圈單元陣列進行同時、分時激勵。線圈單元陣列的模擬開關陣對激勵和檢測傳感器同時選通。陣列傳感器線圈單元陣列通過線圈單元陣列的模擬開關陣將檢測信號送至正交鎖定放大(Lock-in Amplifier,LIA)電路,調理后用 PCI卡采集數據,進行數據處理,完成渦流成像和缺陷檢測。
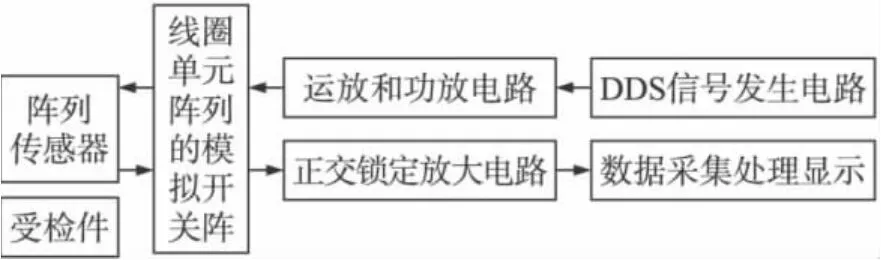
圖1 渦流陣列無損檢測平臺硬件組成框圖
1.2 渦流陣列傳感器的設計
前期研究采用有限元數值計算方法,以線圈單元組為簡化的研究對象,以檢測靈敏度、空間分辨率和線圈單元組有效檢測區域比率等評價指標為依據,對平板表層缺陷檢測渦流陣列傳感器線圈單元內徑、外徑、高度等參數,線圈單元中心距,線圈單元排布方式進行了設計,此處不再贅述[7-9]。基于優化結果,制作了渦流陣列傳感器,排布方式如圖2中所示。所有線圈單元尺寸均相同,外徑3.5 mm,內徑1 mm,高3 mm。線圈單元組呈等邊三角形分布,線圈單元中心距為10 mm。
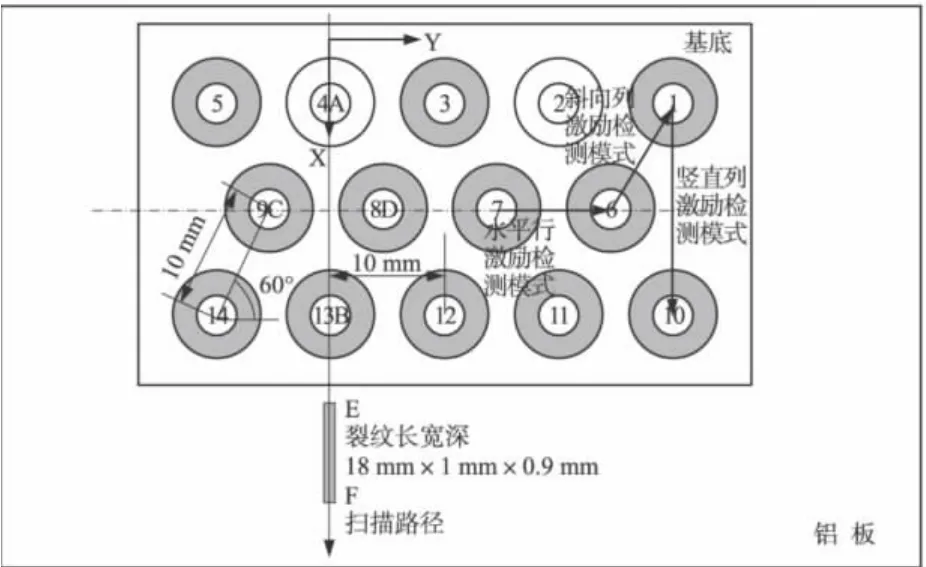
圖2 渦流陣列傳感器示意圖
1.3 激勵檢測模式
基于圖2所示渦流陣列傳感器,根據裂紋特征提取方法的不同,確定了如下三種檢測模式:斜向列檢測模式,如線圈單元6激勵,線圈單元1檢測;豎直列檢測模式,如線圈單元1激勵,線圈單元10檢測;水平行檢測模式,如線圈單元7激勵,線圈單元6檢測。具體的裂紋特征提取方法見§3.2。
2 渦流陣列C掃描成像
由于檢測原理和硬件實現方法的不同,渦流陣列C掃描成像與常規渦流檢測C掃描成像存在幾點區別:①渦流陣列檢測由于不同通道硬件性能、傳感器線圈單元參數、線圈單元排布方式等差異,采集得到的數據須進行通道校準,才能較為準確的反映缺陷真實特征信息;②常規C掃描成像由于有自動掃描裝置,掃描方向和垂直于掃描方向單位掃描尺度均可以很小,陣列檢測由于沒有掃描裝置,垂直于掃描方向的單位掃描尺度決定于線圈單元的中心距和陣列傳感器的排布方式等,通常情況下為線圈單元1/2中心距或1/4中心距,渦流陣列C掃描成像由于垂直掃描方向圖像信息較少,通常需要應用插值方法得到更多的圖像信息。
渦流陣列C掃描成像通道校準實時性要求較高,實際檢測中一般根據待測部件的參考缺陷,選定激勵幅值、頻率和相位等參量,各個檢測通道通過調節自身增益和激勵信號、參考信號相位差等消除輸出信號的差異,相同檢測模式中所有通道可以同時校準。圖3為儀器進行通道校準后應用斜向列檢測模式沿圖2所示掃描路徑對18 mm×1 mm×0.9 mm裂紋實施檢測圖像,圖3(a)~圖3(e)分別代表Y方向5個相鄰檢測線圈單元所得檢測曲線。圖4為相鄰檢測通道間線性插值所得C掃描圖像。
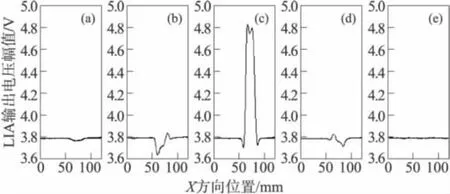
圖3 通道校準后應用斜向列檢測模式裂紋檢測圖像
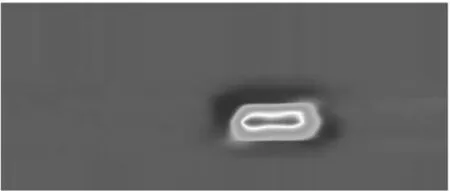
圖4 渦流陣列檢測C掃描圖像
3 渦流陣列修正C掃描成像
3.1 成像原理
渦流陣列檢測由于線圈單元互為激勵檢測,所成C掃描圖像不具有對稱性,由圖3校準后波形也可以看出,且裂紋所在位置與紅色區域有較大的位置差。由于渦流陣列傳感器線圈單元點擴展函數卷積效應導致缺陷圖像模糊,無法確定缺陷長度、寬度等邊緣位置,從而影響渦流陣列檢測的可靠性和檢測效率。
基于上述原因,本文提出了渦流陣列修正C掃描成像,并將裂紋特征提取方法與圖像處理方法有機結合,實現了渦流陣列修正C掃描成像。圖像重構過程如下:
(1)依據裂紋C掃描圖像特征,將C掃描圖像進行圖像分割,每個裂紋區域形成一個子圖像以便于分析。
(2)對每個子圖像進行旋轉變換和灰度分析,結合裂紋特征提取方法獲得方向、寬度中心位置、長度方向邊緣點位置、長度、深度等裂紋特征信息。
(3)對每個子圖像的原灰度圖進行灰度映射、中值濾波、邊緣提取、輪廓跟蹤、空間平移等操作后,應用長度邊緣點對圖像模糊區域的修正值,約束細化操作的迭代次數,得到修正C掃描圖像。
渦流陣列修正C掃描圖像由于包含裂紋的方向、位置、長度等信息,因此,它作為C掃描圖像的一種衍生圖像,可以提高部件無損檢測的速度和可靠性。
3.2 修正C掃描成像中的裂紋特征提取方法
根據上述圖像重構過程,修正C掃描成像中包含裂紋的方向、位置、長度、深度信息,下面結合成像過程對各種特征信息的獲取方法分別進行闡述。
(1)方向信息獲取
對每個子圖像進行0°~90°旋轉變換和灰度分析,對于每個變換后的圖像求取Y方向非零元素的灰度均值。當待測件含直裂紋,則灰度均值最大的投影方向即為裂紋方向,和值最大的Y坐標可近似認為裂紋寬度中心的Y坐標;當待測部件含折線裂紋或曲線裂紋時,可近似看作數個不同方向直裂紋的疊加,求得灰度和值幾個極大值方向進行比較,若夾角大于某一經驗值,則認為待測件裂紋為折線裂紋或曲線裂紋。
(2)長度邊緣點位置和長度獲取
沿裂紋寬度中心的Y坐標,提取每個子圖像Y方向非零元素的灰度值分布,根據相應檢測模式的長度特征量提取方法得到裂紋長度方向邊緣點位置和長度。
三種檢測模式下裂紋長度特征量提取方法如下:斜向列檢測模式下,LIA輸出波形前(后)波峰和后(前)波谷對應掃描長度即為裂紋長度,兩波谷對應的掃描長度為裂紋長度與檢測激勵線圈單元中心距沿掃描方向的分量之和;豎直列檢測模式下,LIA輸出波形波峰和波谷對應掃描長度即為裂紋長度,兩波谷對應的掃描長度為裂紋長度與檢測激勵線圈單元中心距沿掃描方向的分量之和;水平行檢測模式下,LIA輸出波形前波峰和前波谷間拐點與后波峰和后波谷間拐點對應的掃描長度近似為裂紋長度。應用斜向列檢測模式掃描裂紋缺陷時,激勵線圈單元先到達裂紋邊緣點和檢測檢測線圈先到達裂紋邊緣點LIA輸出波形特征略有不同。如果為激勵線圈單元先到達,則長度邊緣點對應為前波峰點和后波谷點;反之,則為后波峰點和前波谷點。
(3)深度獲取
由于裂紋長度和寬度一定時,裂紋深度與三種檢測模式中LIA輸出波形波峰峰值成單調遞增關系,可應用插值擬合或神經網絡方法,快速估計出裂紋深度。提取每個子圖像寬度中心位置前(后)波峰點的灰度值,運用深度先驗數據獲取裂紋深度信息。
3.3 修正C掃描成像中的圖像處理方法
渦流陣列修正C掃描成像解決圖像裂紋位置與實際裂紋所在位置存在位置差和由線圈單元的點擴展效應引起的圖像模糊兩個問題,并將§3.2提取的裂紋特征信息,盡可能直觀地復現。下面就形成修正C掃描成像中的圖像處理方法進行論述。
(1)渦流陣列C掃描圖像的圖像分割
一般情況下,渦流陣列C掃描圖像包含圖像背景、一個或多個缺陷區域、圖像灰度漸變但非缺陷區域等。當僅含一個裂紋時,裂紋區域可能只是圖像的一小部分,如果對整幅圖像進行處理算法實時性較差且難度增加,合理的方法是分割出包含裂紋區域的一小部分進行處理;當包含多個裂紋時,可將圖像分割成多個子圖像,對所有子圖像進行初步判斷濾除掉沒有裂紋區域的子圖像。
圖像處理中的圖像分割技術大致可以分為三類:基于區域的分割算法、基于邊緣的分割算法和結合特定理論工具的分割算法[10-11]。基于區域的分割方法的目的是將圖像劃分為不同的區域,是以直接尋找區域為基礎的分割技術。基于區域的分割方法有兩種基本形式:一種是區域生長,從單個像素出發,逐步合并以形成所需要的分割區域;另一種是從全局出發,逐步切割至所需的分割區域。典型的基于區域的圖像分割方法有閾值法、區域生長和分裂合并的方法等。
渦流陣列C掃描圖像的圖像分割因其分割目標的特殊性,應用現有的基于區域的分割方法均很難有效解決,但由于有大量的先驗知識,可制定非常具有針對性的分割規則完成圖像分割。本文基于裂紋特征提取方法對渦流陣列C掃描圖像提出如下分割算法:
①從全局出發,分析整幅圖像Y方向灰度變化,如果存在某些Y方向圖像灰度變化滿足相應檢測模式下的裂紋長度特征提取曲線的變化特征,則認為存在裂紋,須進行圖像分割;否則,不進行圖像分割,認定此次檢測無裂紋區域。
②X方向圖像分割。如果整幅圖Y方向的灰度變化曲線僅含一個滿足裂紋長度邊緣提取曲線變化特征的區域,則可提取滿足特征的所有灰度變化曲線的前波谷點和后波谷點的X坐標,確定兩波谷點差值最大的Y方向,該Y方向的前波谷X坐標記為x1,后波谷X坐標記為x2,分割出X坐標大于x1-max(x2-x1),小于x2+max(x2-x1)的區域。如果整幅圖Y方向的灰度變化曲線包含多個滿足裂紋長度邊緣提取曲線變化特征的區域,則可確定所有裂紋區域兩波谷點差值最大的Y方向,求取相鄰兩裂紋區域中前裂紋區域差值最大Y方向的后波谷點與后裂紋區域差值最大Y方向的前波谷點的中心點,定為子圖像分割邊緣。
③Y方向圖像分割。Y方向多裂紋區域的識別可通過分析滿足裂紋長度邊緣提取曲線變化特征的所有Y方向坐標,由圖3可以看出,裂紋寬度中心方向滿足長度邊緣提取曲線,但當距寬度中心大于某一閾值,則并不滿足長度邊緣提取曲線。由此可知,如果Y方向存在幾個裂紋,則滿足長度邊緣提取曲線的Y坐標值集中于對應數量的幾個區域。具體的分割規則與規則②類似,限于篇幅此處不再贅述。
根據上述算法,可將C掃描圖像進行圖像分割,每個裂紋區域形成一個子圖像分析方便,且分割算法實時性較強。
(2)渦流陣列C掃描圖像的輪廓提取
為了使修正后的C掃描圖像保留原始圖像最根本的信息,圖像模糊區域消除和裂紋位置差修正均基于原始圖像的輪廓進行。渦流陣列C掃描圖像的輪廓提取包含了灰度映射、中值濾波、邊緣提取和輪廓跟蹤等過程。
灰度映射在電橋式渦流陣列傳感器所成C掃描圖像的輪廓提取中作用較小,但對于激勵檢測式陣列傳感器所成C掃描圖像的輪廓提取非常必要。前者裂紋長度邊緣灰度值均大于圖像背景灰度值,長度兩邊緣均為強邊緣,經過后續算法處理較易得到裂紋區域輪廓;而后者的斜向列和豎直列檢測模式,裂紋總有一個邊緣對應的灰度值小于圖像背景灰度值,且與背景的灰度差遠小于另一邊緣與背景的灰度差,邊緣提取算法易存在邊緣信息提取不完備情況。為了改善邊緣提取的效果和降低算法的復雜度,可對含裂紋區域的子圖像進行如下灰度映射:

式中,g(x,y)為原始圖像灰度值,f(x,y)為映射后灰度值,M為灰度直方圖分布密度最大值點,N為映射后灰度直方圖分布密度最大值點。
渦流陣列檢測中,復雜的檢測環境會使得檢測結果包含大量噪聲。這些噪聲使灰度圖像模糊,甚至淹沒或改變圖像特征,給邊緣檢測和輪廓處理帶來困難。中值濾波是一種較少邊緣模糊的非線性濾波方法,不僅能夠去除或者減少隨機噪聲和脈沖干擾,還能較好地保留圖像邊緣信息[12]。中值濾波模板的大小與平滑效果直接相關,模板越大,平滑的效果越明顯。但模板過大,一方面會增加算法的耗時,另一方面會造成圖像邊緣信息的損失,模板的大小要在保證消除噪聲和算法實時性的前提下盡可能的保持圖像的邊緣信息。
為了提取圖像輪廓信息,須引入邊緣提取算法。邊緣檢測大致可分以下幾類:基于局部圖像函數的方法、基于全局的邊緣檢測方法和圖像濾波的方法[13-14]。圖像濾波的方法,即先對圖像濾波,再對濾波結果作一階或二階導數以尋找邊緣,其中典型的算法有Robert、Kirsch、Sobel、Prewitt、Canny、Marr-Hildreth、Laplacian 算法及基于小波變換的邊緣提取算法等。
邊緣輪廓點跟蹤就是通過掃描二值邊緣圖像,將第一個被掃描到得邊緣像素作為起點,搜索其八鄰域,尋找另一邊緣像素,并記錄下搜索過的邊緣點的空間位置。如其八鄰域內無邊緣點,說明是孤立點,中止搜索。邊緣輪廓經常會出現斷點和分叉,因此輪廓跟蹤須引入補償算法[15]。
(3)圖像模糊區域的消除
由于渦流陣列傳感器線圈單元點擴展函數卷積效應導致裂紋圖像模糊,邊緣檢測算法提取得到裂紋區域的邊緣與實際裂紋邊緣存在較大差異,該差異可通過提取輪廓跟蹤結果所得裂紋長度與§3.2方法所得裂紋長度進行計算。為了消除圖形模糊區域,可引入細化算法。
細化又稱為骨架化,該算法在保持原圖像結構信息的前提下,刪除邊緣像素,抽取單像素寬度的骨架特征。按照處理過程的迭代方式,細化算法分為串行和并行細化算法。并行細化算法由于具有快速、準確等優點,一直是人們的研究熱點。常用的并行細化算法可分為ZS細化算法、LU細化算法、基于神經網絡的細化算法等[6,16-17]。
由于細化是為了消除圖像模糊區域但并不形成單像素骨架,在細化算法中應加入迭代次數的約束條件。迭代次數Nth可依照下式計算:

式中,Lb和Lf分別為提取輪廓跟蹤結果所得裂紋長度和由長度特征提取方法得到的裂紋長度,ΔLS為單次細化算法消減的裂紋長度近似值。
另外,細化之前應對C掃描圖像輪廓跟蹤結果進行種子填充,否則細化算法效果較差。
(4)裂紋位置差修正
圖像裂紋位置與實際裂紋所在位置存在位置差,可通過對圖像進行空間變換的方法進行修正。為此,首先必須提取細化處理后含近似邊緣信息的二值圖像的裂紋長度中心點和寬度中心點。由于細化處理圖像無對稱性,中心點的提取可以采用的方法較多,本文用二值圖像重心近似裂紋中心點,具體計算公式如下:

式中,xbc和ybc分別為細化處理后二值圖像中裂紋中心點的近似X和Y坐標,xi和yi分別為二值圖像中1值點的X和Y坐標,Kx和Ky分別為二值圖像中X和Y方向包含1值點的數量。
結合§3.2節裂紋特征提取方法獲得的裂紋長度中心點xfc和寬度中心點yfc修正xbc和ybc,即得到裂紋位置差修正方法:

式中,ξ(x,y)為細化后二值圖像的灰度值,ξ'(x,y)經過空間變換后二值圖像的灰度值。
4 試驗及結果分析
為了驗證本文算法,基于圖1所示渦流陣列硬件平臺和圖2所示渦流陣列傳感器,應用斜向列檢測模式,沿圖2所示掃描路徑對18 mm×1 mm×0.9 mm裂紋實施檢測圖像,獲得了圖4渦流陣列C掃描圖像。圖5為對圖4進行了圖像分割和灰度映射所得結果。觀察圖5可知,原圖像經過圖像分割和灰度映射后,圖像尺寸減小,有用信息基本保留,弱邊緣得到極大的加強。

圖5 經過圖像分割和灰度映射的C掃描圖像
用 Robert、Kirsch、Sobel、Prewitt、Canny、Marr-Hildreth、Laplacian算法對中值濾波后C掃描圖像進行邊緣提取,通過比較提取結果,Canny算法在提取激勵檢測式陣列傳感器C掃描圖像邊緣信息效果較好,具體結果見圖6。圖7為經過輪廓跟蹤和補償算法后得到的輪廓曲線,輪廓曲線的獲取還可通過對中值濾波后圖像進行二值變換和種子填充,但邊緣毛刺較多,細化處理較難實施。
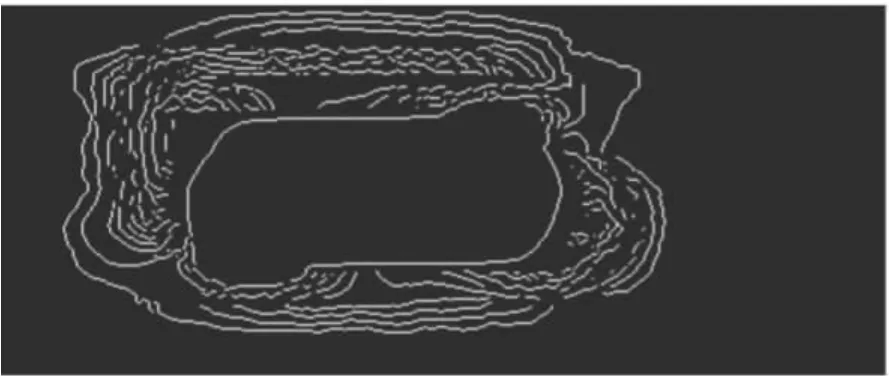
圖6 Canny邊緣提取算法得到C掃描圖像的邊緣信息

圖7 經過輪廓跟蹤和補償后得到的輪廓曲線
對細化處理后的二值圖像進行裂紋位置差修正,將子圖像坐標還原至原C掃描圖像,二值圖像中的數值0點用原圖像灰度代替,數值1點轉變為黑色區域。將處理結果與原C掃描圖進行加法操作后,得到如圖8中所示的修正C掃描圖像。深度信息的復現可采取兩種方法:直接標識或對二值圖像的數值1點用子圖像強邊緣點灰度代替的方法,圖8為了突出處理結果采用直接標識的方法。
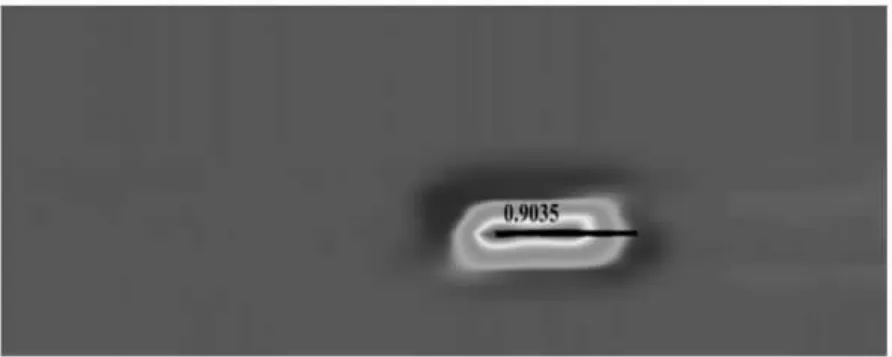
圖8 渦流陣列修正C掃描圖像
將圖4的渦流陣列C掃描圖像與圖8渦流陣列修正C掃描圖像進行對比分析可知,修正C掃描圖像作為C掃描成像的一種衍生圖像,可以較為準確地定量反映受檢件裂紋位置、長度、深度、方向等特征信息,由于去除了缺陷區域圖像模糊和修正了缺陷區域與實際缺陷區域存在的位置差,能夠有效降低渦流陣列檢測的漏檢率和誤檢率,提高檢測的速度。
5 結論
本文將渦流陣列特征提取方法和圖像方法結合,提出了可以較為準確反映裂紋位置、長度、方向等特征信息的渦流陣列修正C掃描成像,并通過成像過程的算法驗證得到如下結論:
(1)基于裂紋特征提取方法對渦流陣列C掃描圖像的分割算法在減小圖像尺寸的同時,基本保留了待提取的裂紋信息。
(2)Canny邊緣提取算法在提取激勵檢測式陣列傳感器C掃描圖像邊緣信息效果較好。
(3)經過邊緣提取、輪廓跟蹤和補償算法提取的輪廓較二值變換和種子填充后的輪廓毛刺較少,更利于細化。
(4)渦流陣列修正C掃描圖像能夠使檢測人員快速識別部件裂紋信息,提高渦流無損檢測的可靠性和速度。
[1]Goldfine N,Zilberstein V,Washabaugh A,et al.Eddy Current Sensor Networks for Aircraft Fatigue Monitoring[J].Material Evaluation,2003,61(7):852-859.
[2]Butin L,Wache G,Perez L,et al.New NDE Perspectives with Magnetoresistance Array Technologies-from Research to Industrial Applications[J].Insight,2005,47(5):280-284.
[3]Crouch A E,Goyen T,Porter P.New Method Uses Conformable Array to Map External Pipeline Corrosion[J].Oil and Gas Journal,2004,102(41):55-59.
[4]高印寒,吳定超,李春光,等.渦流實時成像技術的研究[J].儀表技術與傳感器,2003,4:44-47.
[5]吳迪,張兆東,韓秀甫,等.通用掃描成像檢測軟件的開發及應用[J].無損檢測,2003,25(8):403-406.
[6]Rao B P C,Baldev Raj,Jayakumar T,et al.A New Approach for Restoration of Eddy Curreng Images[J].Journal of Nondestructive Evaluation,2001,20(2):61-72.
[7]Takagi T,Uchimoto T.Design of An Eddy-Current Array Probe for Crack Sizing in Steam Generator Tubes[J].NDT and E International,2003,36(7):515-522.
[8]張玉華,孫慧賢,羅飛路,等.一種用于盤孔裂紋檢測的差動式渦流探頭的設計與實現[J].傳感技術學報,2008,21(6):1079-1083.
[9]任吉林,刁海波,唐繼紅,等.渦流傳感器提離效應的ANSYS模擬[J].傳感技術學報,2008,21(6):967-971.
[10]章毓晉.圖像分割[M].北京:科學出版社,2001.
[11]Zhang Y J.A Survey on Evaluation Methods for Image Segmentation[J].Pattern Recognition,1996,29(8):1335-1346.
[12]張明謙,李雷.改進的中值濾波算法[J].兵工自動化,2007(5):77-80.
[13]張凱麗,劉輝.邊緣檢惻技術的發展研究[J].昆明理工大學學報,2000,25(5):36-39.
[14]尹平,王潤生.多尺度邊緣檢測技術的分類及比較[J].計算機工程與科學,1998,20(1):16-19.
[15]袁野.攝像機標定方法及邊緣檢測和輪廓跟蹤算法研究[D].大連:大連理工大學(博士學位論文),2002.
[16]任傳波,吳紅.二值圖案字符細化的一種算法-神經網絡算法[J].小型微型計算機系統,1999,20(3):228-232.
[17]包建軍,樊菁.魯棒的二值圖像并行細化算法[J].計算機輔助工程,2006,15(4):43-46.
猜你喜歡
艦船科學技術(2022年13期)2022-08-11 09:29:16
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
成都信息工程大學學報(2021年4期)2021-11-22 07:44:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
World Journal of Diabetes(2019年7期)2019-07-23 11:52:08
四川輕化工大學學報(自然科學版)(2017年3期)2017-06-29 12:00:57
海峽科技與產業(2016年3期)2016-05-17 04:32:12