無線傳感網(wǎng)絡(luò)中移動節(jié)點(diǎn)定位技術(shù)研究*
2011-10-19 12:48:00單欣欣
傳感技術(shù)學(xué)報 2011年9期
王 焱,單欣欣,姜 偉
(遼寧工程技術(shù)大學(xué)電氣與控制工程學(xué)院,遼寧葫蘆島 125105)
隨著無線通信和電子學(xué)的飛速發(fā)展,低成本的無線傳感器網(wǎng)絡(luò)也得到了空前的發(fā)展,逐漸成為學(xué)術(shù)界、工業(yè)界的研究熱點(diǎn)[1]。無線傳感器網(wǎng)絡(luò)常常應(yīng)用在軍事、醫(yī)療衛(wèi)生、遠(yuǎn)程監(jiān)控、搶險救災(zāi)等領(lǐng)域,因此對于大多數(shù)無線傳感網(wǎng)絡(luò)來說沒有位置信息的節(jié)點(diǎn)是沒有意義的,因此傳感器節(jié)點(diǎn)的定位問題是無線傳感器網(wǎng)絡(luò)中的一個基本和關(guān)鍵問題。
由于直接給每個節(jié)點(diǎn)安裝GPS接收器,從成本、能耗、體積等方面來說,并不適合無線傳感器網(wǎng)絡(luò)的要求。因此無線傳感網(wǎng)絡(luò)中各節(jié)點(diǎn)能夠進(jìn)行自身定位具有重要的意義[2-3]。目前無線傳感網(wǎng)絡(luò)中對節(jié)點(diǎn)進(jìn)行定位的方法主要有集中式和分布式兩種,但集中式的定位算法需要把信息傳送到某個中心節(jié)點(diǎn),并在那里進(jìn)行節(jié)點(diǎn)定位計算,這樣靠近中心節(jié)點(diǎn)的節(jié)點(diǎn)會因?yàn)橥ㄐ帕看蠖芎倪^大,可能造成能量過早耗盡而導(dǎo)致整個網(wǎng)絡(luò)與中心節(jié)點(diǎn)信息交流的中斷;此外集中式算法也存在當(dāng)網(wǎng)絡(luò)拓?fù)浠颦h(huán)境變化時無法實(shí)時定位等缺點(diǎn)。而分布式算法可以很好的優(yōu)化網(wǎng)絡(luò)的能量分配,降低能量消耗,更具有實(shí)用性。
1 分簇定位算法
對無線傳感器節(jié)點(diǎn)進(jìn)行分簇是目前研究無線傳感網(wǎng)絡(luò)分布式算法的主要設(shè)計方案之一。基于分簇的無線傳感器網(wǎng)絡(luò),可將網(wǎng)絡(luò)感知的數(shù)據(jù)進(jìn)行融合后再進(jìn)行傳輸,減少由于傳輸產(chǎn)生的能量消耗,而且便于對簇內(nèi)節(jié)點(diǎn)的統(tǒng)一管理,有利于對網(wǎng)絡(luò)進(jìn)行擴(kuò)展[4]。
針對無線傳感器網(wǎng)絡(luò)中只有少數(shù)節(jié)點(diǎn)移動,大部分節(jié)點(diǎn)都是靜止的情況。本設(shè)計提出的基于能量最優(yōu)的分簇定位的方法,由簇頭收集信息傳送給基站。在對移動節(jié)點(diǎn)的定位上,由簇內(nèi)節(jié)點(diǎn)的相互通信確定移動節(jié)點(diǎn)的位置信息,并對移動節(jié)點(diǎn)進(jìn)行定位。不僅考慮了定位精度,而且針對只有少數(shù)節(jié)點(diǎn)移動的無線傳感網(wǎng)絡(luò),簇結(jié)構(gòu)可以保持一定的穩(wěn)定性,避免從新組簇的能量消耗,很好的優(yōu)化了網(wǎng)絡(luò)的能量,保證了無線傳感網(wǎng)絡(luò)的生命周期達(dá)到最長。
把傳感器網(wǎng)絡(luò)節(jié)點(diǎn)分成連接的簇,每個簇包含一個簇頭節(jié)點(diǎn)和多個成員節(jié)點(diǎn)。簇成員負(fù)責(zé)檢測收集檢測區(qū)域的參數(shù)值并且把它們發(fā)送給自己的簇頭節(jié)點(diǎn);簇頭負(fù)責(zé)收集來自成員節(jié)點(diǎn)的數(shù)據(jù),進(jìn)行處理、壓縮,并把數(shù)據(jù)傳送給基站。從而可以進(jìn)一步節(jié)約能耗,提高網(wǎng)絡(luò)的穩(wěn)定性。為保證能量的最低消耗,簇內(nèi)節(jié)點(diǎn)實(shí)行單跳通信,即每個節(jié)點(diǎn)獨(dú)立的把信息傳送給簇頭。簇結(jié)構(gòu)如圖1所示。

圖1 無線傳感器網(wǎng)絡(luò)分簇結(jié)構(gòu)
簇頭節(jié)點(diǎn)收集簇中節(jié)點(diǎn)的信息并和基站進(jìn)行通訊,由于處理的數(shù)據(jù)較普通節(jié)點(diǎn)要多很多,所以為了節(jié)省網(wǎng)絡(luò)的能量消耗,對簇頭節(jié)點(diǎn)的個數(shù)要進(jìn)行限制。針對網(wǎng)絡(luò)的覆蓋率問題以及網(wǎng)絡(luò)簇頭的優(yōu)化,規(guī)定了高功率發(fā)射節(jié)點(diǎn)和低功率發(fā)射節(jié)點(diǎn),在這里高功率發(fā)射節(jié)點(diǎn)的通訊直徑是低功率發(fā)射節(jié)點(diǎn)的2倍,以滿足網(wǎng)絡(luò)連通度和最少簇頭的要求[5]。休眠節(jié)點(diǎn)是在某個周期內(nèi)不活動的節(jié)點(diǎn),節(jié)省了網(wǎng)絡(luò)的能量消耗。為了保持網(wǎng)絡(luò)中能量消耗的平均,各節(jié)點(diǎn)根據(jù)能量的剩余量進(jìn)行下一個階段工作模式的選擇。
2 定位算法的具體實(shí)現(xiàn)
假設(shè)無線傳感網(wǎng)絡(luò)模型是一個矩形網(wǎng)絡(luò),在網(wǎng)絡(luò)中安插一定數(shù)量的錨節(jié)點(diǎn),網(wǎng)絡(luò)中各傳感器節(jié)點(diǎn)隨機(jī)分布,在同一周期中只有少數(shù)節(jié)點(diǎn)移動,采用分簇定位的方法對網(wǎng)絡(luò)中位置未知的節(jié)點(diǎn)進(jìn)行定位。對于存在位置固定的錨節(jié)點(diǎn)和移動的待測節(jié)點(diǎn)的無線傳感網(wǎng)絡(luò),先通過少量錨節(jié)點(diǎn)對簇頭進(jìn)行定位,再利用節(jié)點(diǎn)的無線互聯(lián)的性質(zhì)在簇內(nèi)對發(fā)生移動的節(jié)點(diǎn)進(jìn)行定位。采用接收信號強(qiáng)度(RSSI)測距與質(zhì)心定位算法結(jié)合的方法對移動節(jié)點(diǎn)進(jìn)行定位,從而達(dá)到定位精度更高,能量的消耗最少的目的。
2.1 RSSI與質(zhì)心定位算法結(jié)合的定位原則
2.1.1 RSSI傳輸模型的選擇
常用于無線傳感器網(wǎng)絡(luò)模擬的三種傳播模型分別是自由空間模型和地表反射雙電磁波模型以及陰影模型。我們知道,無線信號在傳輸過程中的能量是隨機(jī)變化的,這是由于信號的多徑傳輸。對于未知固定的兩個節(jié)點(diǎn)之間,每次收到對方信號的能量是含有隨機(jī)波動成分的。自由空間模型和地表反射模型沒有將這種隨機(jī)因素考慮在內(nèi),這樣就影響了模型的實(shí)用性。而陰影模型中則考慮到這一點(diǎn)。
陰影模型的優(yōu)點(diǎn)在于,它不僅考慮了通信理論模型,也同時在模型中引入了信道的隨機(jī)因素。該模型由兩部分組成,模型的第一部分表示通信距離與接收信號功率的關(guān)系,并引入了參考點(diǎn)d0,它是接近信號發(fā)送節(jié)點(diǎn)的位置,在本文模型中選擇為一米。d0處接收的平均信號功率為Pr(d0),那么d處的平均功率Pr(d)相對于Pr(d0)的計算公式如下:

其中β稱為路徑損耗指數(shù),這個參數(shù)一般是根據(jù)場地實(shí)際測量的經(jīng)驗(yàn)值而來的。它與障礙物的數(shù)量成正比。因此隨著通信距離的增大接收節(jié)點(diǎn)接收到的信號平均能量下降的加速度會逐步變大如表1。通過對上式兩邊分別取對數(shù),則可得到:

其中pt表示發(fā)送能量,Pr(d0)表示距離d0處的接收功率,Gt和Gr分別表示發(fā)送和接收節(jié)點(diǎn)的天線增益,λ表示通信信號的波長,L表示系統(tǒng)損耗因子。在模擬中通常假設(shè)Gt=1、Gr=1以及L=l。

表1 β在不同環(huán)境下的典型值
公式的第二部分就是路徑損耗模型,用來描述路徑損耗與通信距離的關(guān)系。需要說明的是,路徑損耗是一個對數(shù)正態(tài)隨機(jī)變量,如果以dB作為計量單位它滿足高斯分布。第二部分的陰影模型如下

PL(d)和PL(d0)分別表示無線信號經(jīng)過d和d0的傳輸后的損耗。XdB是一個高斯隨機(jī)變量,均值為0,方差的取值是根據(jù)經(jīng)驗(yàn)值、實(shí)際試驗(yàn)來確定的,一般取值在5左右。
2.1.2 RSSI值的優(yōu)化處理
對接收信號強(qiáng)度和距離之間進(jìn)行動態(tài)調(diào)整。在應(yīng)用中,對于新收到的RSSI值,與上一次的RSSI值作比較,并以上圖中的數(shù)據(jù)為判斷依據(jù),如果相差明顯不符合目標(biāo)實(shí)際運(yùn)動情況,則認(rèn)為是環(huán)境干擾,剔除相應(yīng)數(shù)據(jù);如相差在一定范圍之內(nèi),則儲存該數(shù)據(jù)進(jìn)行下一步的處理。因?yàn)樵诙ㄎ贿^程中,節(jié)點(diǎn)的移動速度是有限的,由此根據(jù)具體情況設(shè)定合適的閾值,通過前后兩次RSSI的差值與閾值進(jìn)行比較即可有效地抑制無線網(wǎng)絡(luò)信道的較大的波動干擾。鑒于節(jié)點(diǎn)每次接收到RSSI后存儲用于下一次RSSI的比較,考慮到節(jié)點(diǎn)第一次接收的RSSI值有可能是干擾數(shù)據(jù),故當(dāng)節(jié)點(diǎn)上電后前兩次接受的RSSI值取均值后作為第一次比較RSSI。
2.1.3 RSSI測距與質(zhì)心定位算法的結(jié)合
為了達(dá)到較好的定位精度,本設(shè)計采用RSSI測距與質(zhì)心定位算法的結(jié)合來對節(jié)點(diǎn)進(jìn)行定位。原有質(zhì)心定位算法沒有反映出不同錨節(jié)點(diǎn)對未知節(jié)點(diǎn)位置影響力的大小,研究得到,未知節(jié)點(diǎn)到錨節(jié)點(diǎn)的距離越近,錨節(jié)點(diǎn)對其定位的影響越大,影響力越大的錨節(jié)點(diǎn)對未知節(jié)點(diǎn)位置有更大的決定權(quán)。RSSI與質(zhì)心定位算法的結(jié)合利用加權(quán)因子體現(xiàn)錨節(jié)點(diǎn)對未知節(jié)點(diǎn)的影響程度,反映它們間的內(nèi)在關(guān)系[8]。該算法的具體做法是:將未知節(jié)點(diǎn)接收到的所有的信標(biāo)節(jié)點(diǎn)的RSSI值進(jìn)行排序。為了降低計算的復(fù)雜度,優(yōu)先選擇RSSI值大的錨節(jié)點(diǎn)組合成的任意的三角形集合,再對其中三個三角形采用進(jìn)一步的加權(quán)質(zhì)心計算

其中(xki,yki)就是用加權(quán)質(zhì)心算法求出的未知節(jié)點(diǎn)坐標(biāo);(x1,y1)(x2,y2)(x3,y3)分別為 3 個錨節(jié)點(diǎn)坐標(biāo);d1,d2,d3為未知節(jié)點(diǎn)與這3個信標(biāo)節(jié)點(diǎn)的近似距離[9]。
再利用下面公式計算未知節(jié)點(diǎn)坐標(biāo)(x,y):
采用RSSI與質(zhì)心算法相結(jié)合的定位算法,隨機(jī)采用RSSI值比較的大的錨節(jié)點(diǎn)信息進(jìn)行質(zhì)心定位,采用三次質(zhì)心定位再取平均值的方式,既提高了定位的精度,也節(jié)省了計算復(fù)雜度。
2.2 簇結(jié)構(gòu)的定位過程
當(dāng)無線傳感網(wǎng)絡(luò)中有節(jié)點(diǎn)發(fā)生移動時,其所在的簇內(nèi)節(jié)點(diǎn)之間通過接收到的RSSI信號大小來判斷節(jié)點(diǎn)的移動情況。通常情況下,信號強(qiáng)度基本上能夠滿足隨距離的增加而單調(diào)遞減的規(guī)律,這樣通過臨近節(jié)點(diǎn)收到的信號強(qiáng)度的變化,不用計算實(shí)際距離,就可以得到節(jié)點(diǎn)的移動信息,這樣可以有效降低由于模型不準(zhǔn)確帶來的誤差。網(wǎng)絡(luò)中采用簇結(jié)構(gòu)的方式對節(jié)點(diǎn)進(jìn)行定位,網(wǎng)絡(luò)中各節(jié)點(diǎn)的通訊能量是各個環(huán)節(jié)中消耗能量最多的環(huán)節(jié),因此為了減少能量的消耗和提高定位精度,對于簇內(nèi)節(jié)點(diǎn)的定位過程如圖2(a)所示。①當(dāng)節(jié)點(diǎn)2發(fā)生移動時,在其通信范圍內(nèi)的節(jié)點(diǎn)接收到的RSSI值發(fā)生變化,相應(yīng)的增大或減小。此時感應(yīng)變化的兩個節(jié)點(diǎn)互為觀測者如圖2(b)所示。②感受到變化的節(jié)點(diǎn)同時像基站發(fā)送變化信息,基站接受此信息后對節(jié)點(diǎn)進(jìn)行標(biāo)記,假設(shè)為(Si,Sj),那么他們當(dāng)中有一個應(yīng)該是移動的。③由于包含不動的觀測節(jié)點(diǎn),因此設(shè)置一個預(yù)定值f(0),在同一周期中,當(dāng)基站記錄的某一點(diǎn)的次數(shù)小于f(0)則視為正常值[10]。④若基站接受到的節(jié)點(diǎn)中多次包含Si我們就可以斷定Si就是移動節(jié)點(diǎn)。同時考慮到簇內(nèi)不只一個節(jié)點(diǎn)運(yùn)動的情況,所以不排除存在另一移動節(jié)點(diǎn)的情況。⑤對移動節(jié)點(diǎn)由簇內(nèi)其他不動節(jié)點(diǎn)對其實(shí)行定位。

圖2 簇內(nèi)節(jié)點(diǎn)的定位
通過簇內(nèi)定位技術(shù),將移動節(jié)點(diǎn)的定位限制于簇內(nèi)進(jìn)行,只對移動的節(jié)點(diǎn)進(jìn)行測距。減少了計算復(fù)雜度,節(jié)省了網(wǎng)絡(luò)的能量消耗,同時克服了依靠錨節(jié)點(diǎn)對移動節(jié)點(diǎn)的定位帶來的長距離測距誤差。由于網(wǎng)絡(luò)中只有少量節(jié)點(diǎn)進(jìn)行移動,簇結(jié)構(gòu)相對穩(wěn)定。基于能量的平均消耗的原則,在一定的時間內(nèi)進(jìn)行節(jié)點(diǎn)工作模式的變換,從而優(yōu)化網(wǎng)絡(luò)能量[11]。
2.3 簇的更新與維護(hù)
在網(wǎng)絡(luò)環(huán)境中,隨著節(jié)點(diǎn)的移動節(jié)點(diǎn)的集合也依據(jù)準(zhǔn)則相繼進(jìn)行更新,即簇的更新,包括簇內(nèi)成員節(jié)點(diǎn)的改變、簇頭節(jié)點(diǎn)的改變,以及簇的重建[12]。簇結(jié)構(gòu)網(wǎng)絡(luò)生成以后,簇的維護(hù)就成了貫穿整個網(wǎng)絡(luò)生命期的工作。簇的維護(hù)工作主要就是處理節(jié)點(diǎn)的退出、節(jié)點(diǎn)的加入、簇的從組等幾種情況。
節(jié)點(diǎn)的退出:當(dāng)一個節(jié)點(diǎn)在下一周期發(fā)生移動后離開原來的簇,原來的簇頭節(jié)點(diǎn)接受不到他的信息,則認(rèn)為該節(jié)點(diǎn)退出本簇,簇頭節(jié)點(diǎn)將其信息刪除,并通知整個網(wǎng)絡(luò)出簇消息。
節(jié)點(diǎn)的加入:當(dāng)一個不屬于任何簇的普通節(jié)點(diǎn)進(jìn)入到某個簇的范圍,或某個簇的成員節(jié)點(diǎn)離開原來的簇進(jìn)入到另一個簇的范圍,簇頭節(jié)點(diǎn)接受到他的信息并發(fā)送的簇頭消息給新加入節(jié)點(diǎn),并把新加入節(jié)點(diǎn)的信息加入信息列表,并通知整個網(wǎng)絡(luò)入簇消息。
簇的重組:當(dāng)網(wǎng)絡(luò)中出現(xiàn)不能通信的節(jié)點(diǎn),則簇結(jié)構(gòu)進(jìn)行重組。在移動自組網(wǎng)絡(luò)中,還可能因簇首節(jié)點(diǎn)鄰接而觸發(fā)簇首競爭導(dǎo)致某個簇內(nèi)節(jié)點(diǎn)很少,當(dāng)某個簇內(nèi)節(jié)點(diǎn)少于設(shè)定值時放棄該簇,各節(jié)點(diǎn)尋找新的簇頭節(jié)點(diǎn)。因此簇結(jié)構(gòu)的變化頻率越小說明生成的簇結(jié)構(gòu)越穩(wěn)定,能量消耗越小。考慮到能量的平均消耗,簇結(jié)構(gòu)發(fā)生變化時,各節(jié)點(diǎn)工作狀態(tài)也發(fā)生變化。
3 仿真結(jié)果
假設(shè)無線傳感網(wǎng)絡(luò)中錨節(jié)點(diǎn)的個數(shù)超過三個,實(shí)驗(yàn)結(jié)果表明基于RSSI測距和質(zhì)心定位算法結(jié)合的分簇定位算法可以很好的實(shí)現(xiàn)移動節(jié)點(diǎn)的定位,并且使網(wǎng)絡(luò)的能量消耗趨于平均。如圖3所示為簇頭節(jié)點(diǎn)和休眠節(jié)點(diǎn)數(shù)量均為總結(jié)點(diǎn)數(shù)量的10%左右,簇頭節(jié)點(diǎn)、高功率發(fā)射節(jié)點(diǎn)和低功率發(fā)射節(jié)點(diǎn)的能量損耗之比為20∶2∶1,休眠節(jié)點(diǎn)為零的情況下,定位算法的能量消耗曲線,15個周期系統(tǒng)的通訊能量消耗保持在300以下,運(yùn)行能量消耗也能夠維持在3.8以下。
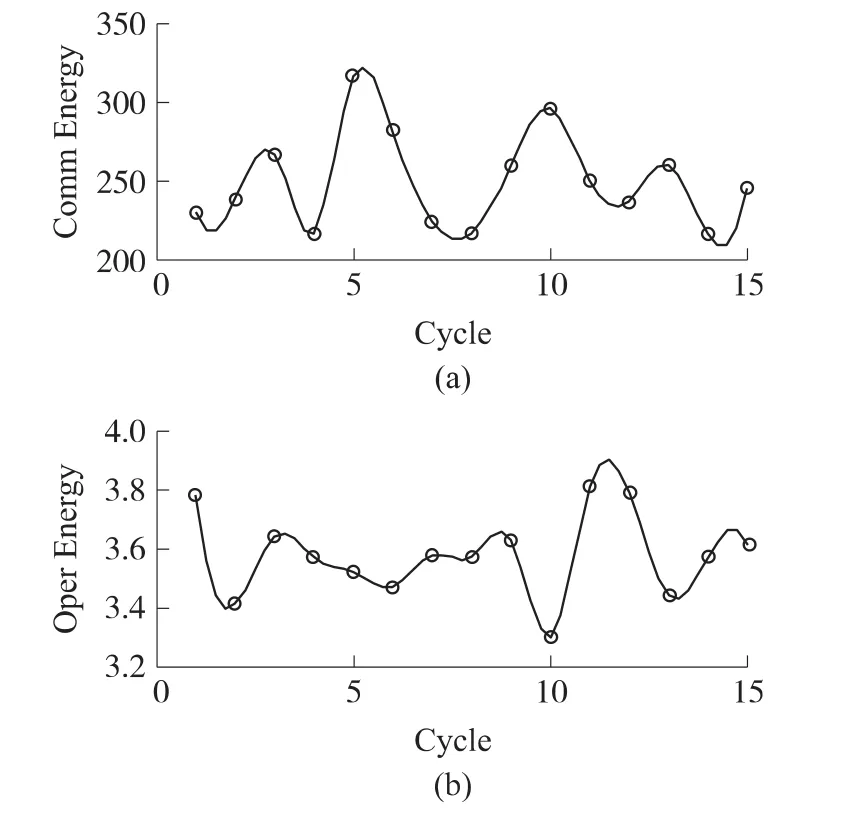
圖3 能量損耗曲線
針對移動節(jié)點(diǎn)的定位我們采取了跟蹤定位的方式,對一個節(jié)點(diǎn)進(jìn)行移動跟蹤定位,其結(jié)果如圖4所示,在相同條件下,隨著時間的變化節(jié)點(diǎn)進(jìn)行隨機(jī)移動,基于RSSI校正后的定位誤差明顯小于原始定位誤差,定位精度更高。節(jié)點(diǎn)的適應(yīng)性增強(qiáng),提高了系統(tǒng)的可靠性。

圖4 移動節(jié)點(diǎn)定位誤差比較
4 結(jié)束語
無線傳感網(wǎng)絡(luò)的動態(tài)性和各種移動節(jié)點(diǎn)的定位需求,如何以較小的能耗達(dá)到較高的定位精度是一個熱點(diǎn)和難點(diǎn)問題[13]。本文提出了基于分簇的定位算法,克服了長距離定位帶來的定位誤差,節(jié)約了傳輸過程中的能量消耗。采用RSSI與質(zhì)心定位結(jié)合的算法,不僅有效的減小了因RSSI值誤差所引起的定位誤差,而且對質(zhì)心定位算法進(jìn)行了有效的改進(jìn)。MATLAB仿真結(jié)果表明本設(shè)計所提出的基于RSSI和質(zhì)心定位結(jié)合的分簇定位算法兼顧了定位精度、錨節(jié)點(diǎn)個數(shù)和能量消耗的平衡。在保證精度更高的前提下,減少通信開銷,使網(wǎng)絡(luò)的生命周期達(dá)到最長。
[1]劉愛平,劉忠,梁鑰,等.基于距離的分布式無線傳感器網(wǎng)絡(luò)定位算法[J].計算機(jī)應(yīng)用研究,2008,8:2528-2531.
[2]屈巍,李喆.基于RSSI的無線傳感網(wǎng)絡(luò)節(jié)點(diǎn)定位技術(shù)研究[J].傳感技術(shù)學(xué)報,2009,22(5):656-659.
[3]戴瑩,王建平,張崇巍.無線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)定位算法的研究與改進(jìn)[J].傳感技術(shù)學(xué)報,2010,23(4):567-570.
[4]YAO Zhongxiao,YU Li,DONG Qifen.Beacon-Based DV-Hop Localization Algorithm in Wireless Sensor Networks[J].2009,22(10):1504-1509.
[5]王焱,單欣欣.遺傳算法在森林防火預(yù)警網(wǎng)絡(luò)中的應(yīng)用[J].計算機(jī)系統(tǒng)應(yīng)用,2011,20(5):130-134.
[6]王珊珊.基于RSSI的無線傳感器網(wǎng)絡(luò)定位算法研究[D].湖南:國防科學(xué)技術(shù)大學(xué).2007.
[7]李娟.無線傳感網(wǎng)絡(luò)節(jié)點(diǎn)定位算法及能量高效路由協(xié)議的研究[D].吉林大學(xué)博士學(xué)位論文.2009.
[8]石為人,許磊.一種面向無線傳感器網(wǎng)絡(luò)相對定位的分簇算法[J].計算機(jī)工程與應(yīng)用,2008,44(24):15-18.
[9]Bahi J M,Makhoul A,Mostefaoui A.Localization and Coverage for High Density Sensor Networks.Computer Communications,2008,31(4):770-781.
[10]車文剛,蘇磊,王宏祥,等.二分圖的無關(guān)分解及其在覆蓋問題中的應(yīng)用[J].電子學(xué)報,1998(5):42-47.
[11]郭永紅,萬江文,于寧,等.基于跳數(shù)的無線傳感器網(wǎng)絡(luò)定位求精算法[J].計算機(jī)工程.2009,35(3):145-147.
[12]王繼春.無線傳咸器網(wǎng)絡(luò)節(jié)點(diǎn)定位若干問題研究[D].安徽:中國科學(xué)技術(shù)大學(xué).2009.
[13]ZHONG You-ping,KUANG Xing-hong,HUANG Pei-wei.Improved Algorithm for Distributed Localization in Wireless Sensor Networks[C]//Shanghai Jiaotong University and Springer-Verlag Berlin Heidelberg 2010.Houston:J.Shanghai Jiaotong Univ.(Sci.),2010,15(1):64-69.