基于多傳感器集成的仿人機器人足部感知系統*
2011-10-20 10:55:30吳寶元羅健飛吳仲城
傳感技術學報 2011年12期
申 飛,吳寶元,羅健飛,任 陽,吳仲城
(1.中國科學技術大學自動化系,合肥 230027;2.中國科學院合肥物質科學研究院,合肥 230031)
仿人機器人是近年來發(fā)展起來的綜合學科。在人類的生存環(huán)境中,實現雙足穩(wěn)定可靠行走是仿人機器人最基本的功能,也是仿人機器人實用化的前提條件。從近幾年國內外仿人機器人技術發(fā)展的趨勢和應用需求來看,如何適應各種不同路面狀況和人類生存環(huán)境,增強仿人機器人在未知環(huán)境中的適應能力,已成為眾多研究者所關注的重點研究內容之一,并取得了一些成果[2-5]。目前,零力矩點ZMP(Zero Moment Point)判據作為穩(wěn)定步態(tài)規(guī)劃方法的理論基礎被廣泛采用,從雙足或軀干的運動軌跡確定ZMP軌跡,實現了穩(wěn)定行走[6-7],其中,基于仿人機器人踝關節(jié)的多維力傳感器獲得ZMP等信息,進而實時調整步態(tài)參數,設計合理的雙足和軀干軌跡,以此來增強機器人環(huán)境適應能力己成為仿人機器人控制技術研究的一個發(fā)展趨勢[8-12]。
足部感知系統是仿人機器人唯一與地面接觸并發(fā)生相互作用的關鍵部件,其獲取的各種地面信息是機器人實現仿人的自然性穩(wěn)定行走控制的關鍵。目前國內外各種仿人機器人的足部系統主要是采用六維力傳感器和陀螺儀,還不能滿足仿人機器人實用化需要。實際上,人行走過程中,足底的神經末梢可實現地面接觸位置、地形、地面反作用力大小和方向等信息的實時感知,并及時反饋到中樞神經系統,使之能及時調整身體姿勢。仿人機器人要實現適應人類生活、工作環(huán)境,僅僅依靠六維力信息還遠不能滿足應用要求,仿人機器人穩(wěn)定步態(tài)規(guī)劃僅依靠六維力傳感器檢測的信息是不夠充分的,并且,足部翻轉指示點(Foot Rotate Indication,FRI)[1,13],翻轉穩(wěn)定指標點(Rotational Stability Index(RSI)Point)[14]等穩(wěn)定性判據的實現,需要足部具備對各種地面環(huán)境識別和足部姿態(tài)感知能力,實現足底接觸位置、有效支撐區(qū)域(Effective Contact Area,ECA)、地面反力以及姿態(tài)等信息的實時感知和估計。
對此,本文設計了一種具有復雜地面環(huán)境感知能力的集成化仿人機器人足部感知系統,一方面可以實時獲取足部姿態(tài)和地面環(huán)境信息參數,實現機器人行走過程中有效穩(wěn)定支撐區(qū)域、ZMP軌跡、地形、地面反作用力等信息實時感知和處理;另一方面,可以有效減少機器人中央控制系統處理器的計算負擔,增強機器人實時性和快速反應能力。實機實驗結果表明這種集成化足部感知系統可以實時為機器人中央控制系統提供較為充分的地面環(huán)境信息,為建立和完善的仿人機器人的仿生步態(tài)規(guī)劃以提高仿人機器人的步態(tài)穩(wěn)定性和自然性提供信息支持和實驗研究平臺。
1 足部感知系統架構
1.1 設計原則
機器人足部作為機器人的主要部件,在充分了解人足行走功能基礎上開展足部設計很有必要,在人體的正常行走步態(tài)中,足部除了協調人體平衡外,主要支撐人體重量、吸收地面沖擊力和振動、減小對末端關節(jié)載荷和增加行走舒適性。
足部作為仿人機器人承受外部載荷的唯一部件,位于腿部運動鏈的末端,承受的慣性力最大。因此,足部應采用輕質結構設計,并滿足一定強度,以承受發(fā)生在足跟觸地(Heel-Strike)時刻的幾倍于機器人重量的沖擊載荷[15]。
行走過程中,足底反作用力有可能作用在足底有限區(qū)域內,將影響機器人的平衡和步行效果,特別是行走在不平地面時的產生的慣性力將引起接觸區(qū)域的重新分布,盡管在平整地面靜態(tài)行走情況下,足底的ECA可不考慮,但是在不平地面下,動態(tài)行走平衡控制將ECA分布視為主要的影響因素。
鑒于上述分析,基于人足行走功能分析的仿人機器人足部感知系統設計應著重考慮以下原則:
(1)盡可能增大足底與不同地面間的附著力以真實反映地面反力狀態(tài);
(2)足部結構具有足夠剛度以確保機器人系統穩(wěn)定性,;
(3)柔性足部結構設計,足底具有一定的沖擊力緩沖作用以保證機器人穩(wěn)定;
(4)具有有效接觸面積的獲取和地面環(huán)境狀態(tài)感知能力;
(5)外表美觀且重量輕,且具有抗外界電磁干擾的能力,確保信息真實可靠。
1.2 系統架構
基于上述原則分析,足部系統架構重點考慮以下問題:
(1)減小六維力傳感器的形心坐標與地面間的距離,盡可能降低機器人重心高度,易于機器人保持平衡;
(2)為達到足-地減震效果,在足跟和足趾兩端采用空氣型腔結構設計,特別是足跟著地時的沖擊力;
(3)足底板采用平板設計,可以保持雙足支撐期內的踝關節(jié)位置相對趨于穩(wěn)定;另一方面,平板設計可以使得足部與地面的接觸面積最大化,有助于機器人保持穩(wěn)定,并且航空鋁材料的選用,符合重量輕,強度高的要求;
(4)足部感知信息包括:足部姿態(tài)、ECA分布、ZMP軌跡、地面反力信息以及慣性力信息等,通過DSP高速處理器采集處理后發(fā)送到機器人中央控制系統(Central Control System of Robot,CCSR),從而大大減輕CCSR的運算負擔,提高機器人的控制響應能力。
集成化足部感知系統主要包括:信號處理模塊、電源模塊、六維力/力矩傳感器模塊、慣性測量模塊、柔性力傳感器陣列模塊等。
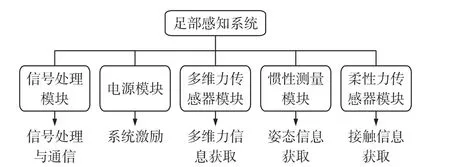
圖1 集成化足部感知系統模塊組成
2 傳感器系統配置與模塊設計
2.1 六維力信息獲取模塊
擬采用一體化平面結構的六維力傳感器設計思想,所設計的傳感器固定端、負載端和彈性體處于同一平面內,對各維分量采用特定組橋方式實現信號獨立提取,以實現傳感器各維之間弱耦合設計,從原理上可實現結構解耦,同時有效降低六維力傳感器的整體高度。RTI六維力傳感器主要靜態(tài)指標如表1 所示[16]。
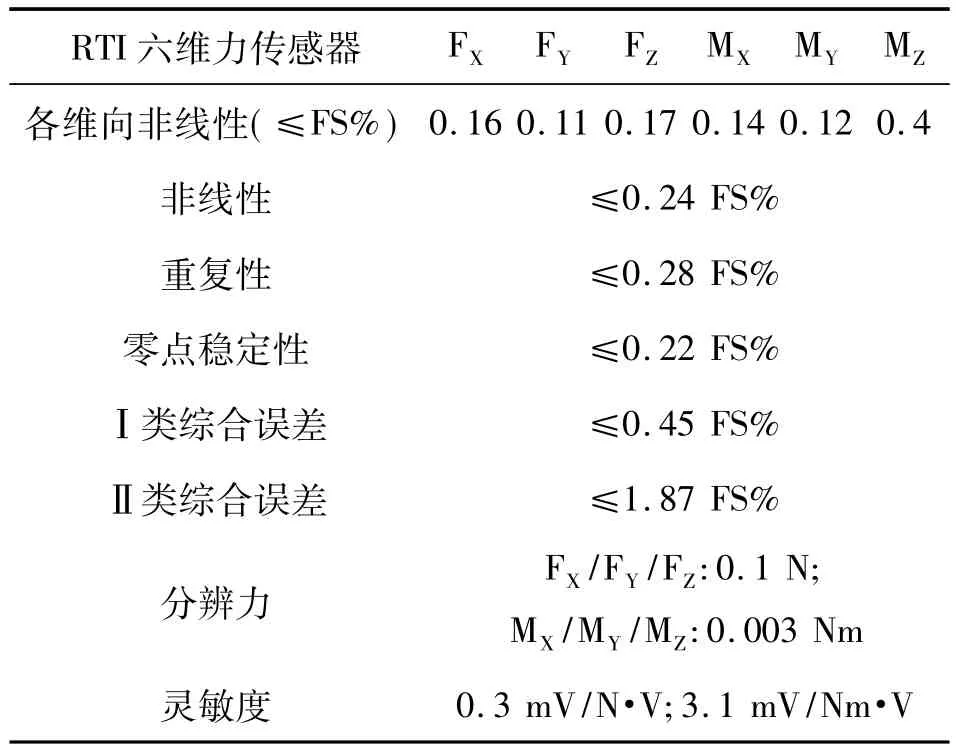
表1 RTI六維力傳感器主要靜態(tài)指標
2.2 姿態(tài)信息獲取模塊
本足部系統姿態(tài)信息獲取選用ADI公司的ADIS16355?慣性感應系統來完成,用于檢測X/Y/Z三個軸向的加速度和繞三個軸的角速度運動,以獲取慣性力和腳的姿態(tài)的信息[17]。具體實現過程:
(1)當機器人足部靜止時,對采集的三軸加速度信息進行計算,得到靜態(tài)腳面傾角信息;
(2)當機器人足部非靜止時,對采集的三軸角速度信息進行計算得到角度變化值;
(3)對上述靜態(tài)腳面傾角信息和角度變化值進行計算,得到實時腳面傾角信息。
2.3 有效接觸區(qū)域信息獲取模塊
FSR柔性力傳感器陣列由兩個壓電橡膠材料制成的聚合體薄片組成(如圖2所示),利用壓阻效應實現足底與地面接觸過程中的壓力分布,以實現地面接觸位置、有效支撐區(qū)域與地面環(huán)境的識別。
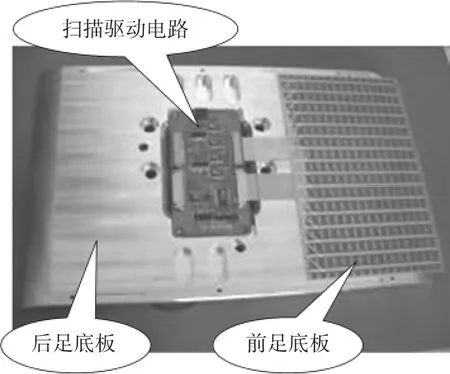
圖2 16×16柔性力傳感器陣列及貼裝示意圖
2.4 DSP信息處理系統
DSP可以實現較為復雜的控制算法,以及大量傳感器信息的快速處理,并具有開放性功能、高速高性能和模塊化等特點,適用于各種先進智能裝備的系統控制,足部系統以DSP微處理器為核心,通過A/D(模數轉換)實時采集傾角傳感器和六維力傳感器的信息,通過I/O(輸入/輸出接口)實時采集觸覺陣列的信息,綜合這些信息進行處理(如:足部姿態(tài)、足-地接觸位置、接觸形狀、行走路面的平整度以及反作用力等信息),并通過通訊總線將這些信息發(fā)送給仿人機器人的控制系統,減少了仿人機器人控制系統的計算工作量,節(jié)約了控制系統的響應時間,不僅為仿人機器人的控制系統提供實時的步態(tài)信息,而且為仿人機器人的步態(tài)規(guī)劃提供更加充分的路面環(huán)境信息,提高仿人機器人控制系統的響應速度。足部感知系統信號處理模塊及框圖如圖3~圖4所示。

圖3 足部感知系統信號處理模塊

圖4 信號處理模塊框圖
2.5 足部感知系統上位機程序
集成化足部感知系統上位機程序(如圖5所示)具有足部采集的各種數據信息(包括六維力傳感器、柔性力傳感器陣列、三個軸向加速度及角加速度等信息)進行實時顯示、實時保存、歷史數據波形回放顯示、采樣頻率參數設置、實時ZMP軌跡、COP位置計算及顯示、傳感器信息電子表單自動生成等功能。
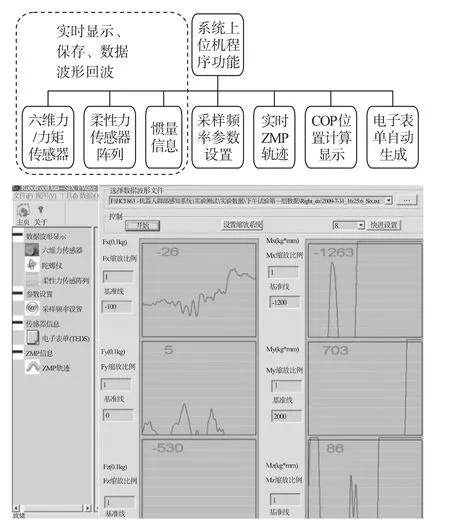
圖5 上位機程序功能及操作界面
3 足部感知系統實機實驗
為驗證足部感知系統在模擬凹凸不平的路面狀況下的各項性能(信息獲取、處理與融合、通信),將集成化足部感知系統IPF-I集成到北理工BHR-2機器人平臺進行了系統聯調和實機行走試驗(如圖6所示)。為模擬凹凸不平的路面在實驗室地面上放置一根截面為圓形(直徑6mm)的紅色線纜,行走過程中機器人右足踏在線纜上以模擬凹凸不平的路面狀態(tài)。

圖6 平板式集成化足部感知系統(a)與實驗現場(b)
實驗結果如圖7~圖10所示,各項數據分析表明,足部感知系統可以實時獲取足部及地面接觸信息,并能夠實時將處理后的信息(ZMP軌跡、姿態(tài)、ECA等)發(fā)送到機器人中央控制系統,均較好滿足預定的各項指標要求。
圖8為單足支撐ZMP軌跡變化情況,依據ZMP仿人機器人行走穩(wěn)定條件,機器人處于穩(wěn)定態(tài)。
圖9為右足踏在電纜線時,FFSA傳感陣列感知的信息并獲取有效支撐區(qū)域(獲取方法見[18])(圖中輪廓Contour of ECA)。仿人機器人穩(wěn)定控制與評估的準確性在于穩(wěn)定性判據應該是以實際的有效支撐區(qū)域邊界為臨界約束條件。
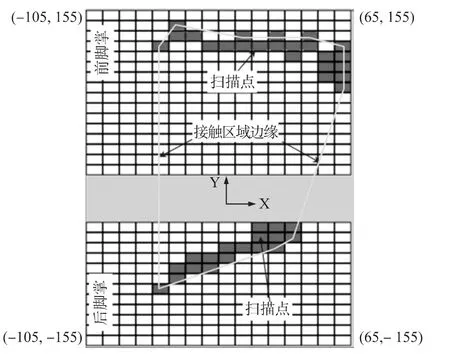
圖9 FFSA獲取的有效支撐區(qū)域
圖10所示為BHR-2機器人行走過程中,利用姿態(tài)傳感器測得的右足擺動期加速度(ax,ay,az)和角速度(wx,wy,wz)變化情況。圖中擺動期間足部在前向(X軸向)和豎直向(Z軸向)的加速度增大,側向(Y軸向)加速度趨于平穩(wěn),而沿側向軸(Y軸)的角速度變化較大,說明足部前向擺動過程中伴隨著繞Y軸的轉動。

圖10 仿人機器人右足擺動期加速度/角速度變化
4 結論與展望
仿人機器人足部感知系統是一個多傳感器高度集成的信息獲取與處理系統,不僅具有地面反力、足部姿態(tài)、ZMP、足底有效接觸的測量功能,還需要減震功能以減小或消除機器人行走過程中來自地面的沖擊力。因此,在結構和軟/硬件方面均面臨著靜態(tài)測量精度和動態(tài)實時性,以及與機器人中央控制系統的通信方式及傳感器接口標準化的問題。此外,人類在行走過程中雙腳結構可以實現彎曲使行走比較自然,同時使行走更加協調保持身體的穩(wěn)定性,對此,為了使仿人機器人在行走過程中更加穩(wěn)定,提高行走的速度,基于現有足部感知系統的關節(jié)型足部結構設計與實驗研究將作為本文后續(xù)的研究重點,使仿人機器人的足部更加的接近人類的足部,實現在行走過程中足部的彎曲,從而可以減輕膝蓋及以上關節(jié)的負重,其行走更接近于人類的行走姿態(tài),行走更加平穩(wěn)、更加自然,行走速度也將會有很大的提高空間。
[1]Ambarish Goswami.Postural Stability of Biped Robots and the Foot-Rotation Indicator(FRI)Point[J].The International Journal of Robotics Research,1999,18(6):523-533.
[2]Nandha Handharu,Jungwon Yoon,Gabsoon Kim.Gait Pattern Generation with Knee Stretch Motion for Biped Robot using Toe and Heel Joints[C]//8th IEEE-RAS International Conference on Humanoid Robots,Daejeon,Korea,2008:265-260.
[3]Yong-Duk Kim,Bum-Joo Lee,Jeong-Ki Yoo.Landing Force Controller for a Humanoid Robot:Time-Domain Passivity Approach[C]//IEEE International Conference on Systems,Man,and Cybernetics,Taipei,Taiwan,2006:4237-4242.
[4]帥梅,付成龍.不平整地面仿人機器人行走控制策略[J].機械工程學報,2006,42(8):1-6.
[5]曹恒,孟憲偉,凌正陽.兩足外骨骼機器人足底壓力測量系統[J].傳感技術學報,2010,23(3):326-330.
[6]Tomohito Takubo,Yoshinori Imada,Kenichi Ohara,et al.Rough Terrain Walking for Bipedal Robot by Using ZMP Criteria Map[C]//IEEE International Conference on Robotics and Automation,Kobe,Japan,2009:788-793.
[7]Christine Chevallereau,Dalila Djoudi,Jessy W Grizzle.Stable Bipedal Walking with Foot Rotation Through Direct Regulation of the Zero Moment Point[J].IEEE Transactions on Robotics,2008,24(2):390-401.
[8]Koichi Nishiwaki,Yoshifumi Murakami,Satoshi Kagami.A Six-Axis Force Sensor with Parallel Support Mechanism to Measure the Ground Reaction Force of Humanoid Robot[C]//Proceedings of the 2002 IEEE International Conference on Robotics& Automation,Washington,DC,2002:2277-2282.
[9]Makoto Shimoj,Takuma Araki,Aigou Ming,et al.A ZMP Sensor for a Biped Robot[C]//Proceedingsofthe2006 IEEE International Conference on Robotics and Automation,Orlando,Florida,2006:1200-1205.
[10]Gab-Soon Kim,Hyi-Jun Shin,Jungwon Yoon.Development of 6-Axis Force/Moment Sensor for Humanoid Robot’s Foot[C]//IEEE Sensors Conference 2007:217-220.
[11]Jong Hyeon Park,Eung Seo Kim.Foot and Body Control of Biped Robots to Walk on Irregularly Protruded Uneven Surfaces[C]//IEEE Transactions on Systems,Man,and Cybernetics-Part B,2009:289-297.
[12]Klaus L?ffler,Michael Gienger,Friedrich Pfeiffer.Sensors and Control Concept of a Biped Robot[C]//IEEE Transactions on Industrial Electronics,2004,51(5):972-980.
[13]A Goswami.Foot-Rotation Indicator(FRI)Point:A New Gait Planning Tool to Evaluate Postural Stability of Biped Robots[C]//IEEE InternationalConference on Roboticsand Automation(ICRA).Detroit.pp.1999,47-52.
[14]Goswami Dip,Vadakkepat Prahlad.Rotational Stability Index(RSI)Point:Postural Stability in Planar Bipeds[J].Robotica,2010,FirstView:1-11.
[15]Makoto Shimojo,Takuma Araki,Aigou Ming.A ZMP Sensor for a Biped Robot[C]//IEEE International Conference on Robotics and Automation,Orlando,Florida,2006:1200-1205.
[16]吳寶元,申飛,吳仲城.應變式多維力傳感器結構優(yōu)化設計方法研究[J].傳感技術學報,2010,23(10):1414-1416.
[17]錢昌忠,吳仲城,申飛,等.姿態(tài)傳感器在仿人機器人足部感知系統中的應用[J].儀表技術,2010(9):68-70.
[18]Baoyuan Wu,Fei Shen,Zhongcheng Wu,et al.Acquisition of Effective Contact Area Based on Force-array Sensors for Humanoid Robot Foot[C]//3rd IEEE Int.Conf.on Signal Processing Systems.2011.Tantai,China.Vol.2.pp.527-531.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
