光電測尺的數字顯示設計
2011-10-20 07:21:28廣西南寧地區教育學院伍瓊芬施家添李素玲
河南科技 2011年22期
廣西南寧地區教育學院 伍瓊芬 施家添 李素玲
光電測尺的數字顯示設計
廣西南寧地區教育學院 伍瓊芬 施家添 李素玲
光電測尺,即激光準直檢測儀,對它的研制起源于橋式起重機的安全性檢測。橋式起重機是工程中廣泛應用的大型起重運輸機械,且經常用于關鍵崗位。作為主要受力構件的主梁,其安全性不僅影響到生產能否正常進行,甚至會危及人身安全,因此,國家規范不僅明確規定必須定期檢測,而且對檢測要求甚高;而具體實施中,檢測手段卻相當簡陋,要求與現實差距很大。若采用高精度裝置,則因其現場使用不便,裝置價格昂貴而無法普遍使用。因此,筆者根據實際情況,指出如下研制思路:光電測尺的數字顯示要適合規范要求的精度,且現場使用方便,價格適中,便于推廣。
一、相關原理
1. 光電檢測原理。光電檢測裝置主要由光電傳感器進行測量,見圖1。光電傳感器的作用原理是:光源產生光通量,光通量的參數(如輻射能流的橫截面積、光譜成分及光強度等)受被測對象控制,然后由光電器件接收再轉變成電參數的變化進行測量。

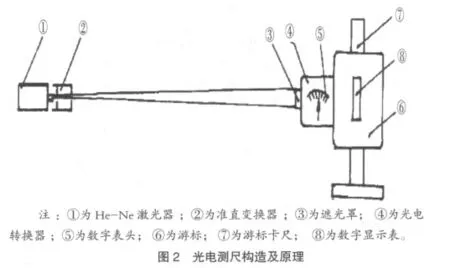
2. 光電測尺的構造及工作原理。光電測尺采用激光光束作為基準,充分發揮了激光直線性好、光強高、在較遠距離仍能保持一定光強的特性。但光束有一個擴散角,到一定距離后光斑直徑較大,不便采集,因此,根據檢測距離,壓縮發散角以調整光斑直徑作為研制工作的第一步;得到適當的光斑直徑后,采用集光、機、電為一體的測尺,一步實現檢測,這是裝置的關鍵所在和創新之處。利用這套裝置,研究人員先后在現場完成l1臺雙梁橋式起重機箱形主梁的變形檢測,達到了預期效果,并有普遍推廣價值。研究人員還進行過電梯軌道、起重機軌道的平直度檢查,也是成功的。從原理上講,大型結構平整度完全可以用它進行檢測;經過改裝,還可以用于橋梁、高層建筑的位移監測。裝置原理見圖2。
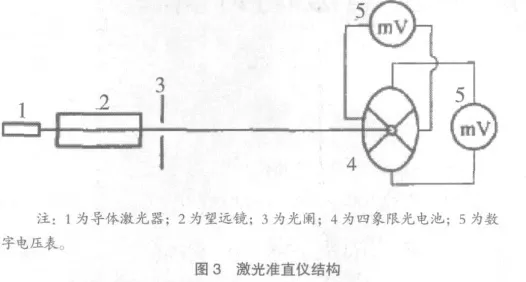
3. 光學準直系統設計原理。采用激光準直儀由半導體激光器及電源、小型單筒望遠鏡、孔徑約1 cm 的圓光闌、二象限光電池、2個可正、負顯示的小量程數字電壓表、導軌和3個調節架組成,見圖3。其中,半導體激光器用于產生紅色激光,倒置望遠鏡用于對激光器發出的激光束進行擴束準直,圓光闌可起到控制光斑直徑大小及獲得近似的軸對稱圓光束的雙重作用,二象限光電池用于檢測激光束中心相對其中心的位置。激光準直儀檢查導軌的平直度的原理:由可見紅光的半導體激光器配上單筒望遠鏡及合適孔徑的圓光闌,經調節可形成一束與導軌軸平行且有一定截面積大小的基準光束。實驗表明,從光闌射出的軸對稱圓光束在強度和光強分布上均能滿足實驗的要求。光路調節好后,當裝有二象限光電池的調節架在導軌上由近及遠(或相反)移動時,可由照在二象限光電池上光斑的上下、左右偏移而引起2個電壓表讀數正負和大小的變化來檢驗導軌是否有高低起伏或扭曲。
二、實驗設計
1. 設計原理。數字化顯示的工作原理是:光電測尺的內部電源是2塊并行連接的硅光電池,用激光照射時,如果光斑在2塊光電池的照射面積不同,2塊光電池產生電勢差且在回路閉和時產生光電流(即在傳統顯示時的表盤指針偏轉)。基于此研究者把內部的電路的微光電流信號引出進行電流補償,再通過模數轉換器進行模數轉換,最后由數碼管或者液晶片顯示出來。
電路設計、由以下幾部分組成:微光電流補償電路、模數轉換電路、數字顯示功能塊和為整個系統提供能量的電源電路,見圖4。在設計過程中,該設計使用的最核心的部分是具有高性能、高輸入阻抗和良好的線性A/D轉換特性的芯片UP5035A。

由于外部的干擾,在沒有光信號輸入的情況下,數字表仍有示數。為了提高檢測的精度,必須設計電路進行補償。
在設計為整個系統提供能量的電源電路時,要將為整個系統提供能量的電源電路和微光電流補償電路兩部分分開設計,這樣既確保了精度又簡化了電路的設計。
該設計最終組裝完成的儀器由3部分組成,即探測頭部分、游標卡尺部分和主機顯示部分,見圖5。探測頭部分的主要材料是二象硅光電池,受到光照射刺激時所產生的光電流會經一根細導線引入主機顯示部分。游標卡尺的可動游標端和探測頭粘連在一起,因此移動游標卡尺的可動游標端時,探測頭也會相應地移動,并且移動的距離可以讀出來。主機顯示部分的主要外觀組成是液晶顯示屏(可以進行3位半的顯示),機體表面的另外2個旋鈕分別是主機的開關和顯示的調零旋鈕(用于每次使用前對顯示示數進行調零),其中主機和探測頭由細導線連接。

2. 實驗精度測定。考慮到對橋式起重機及電梯使用過程中的安全性、可靠性的檢測,對檢測精度只要求到毫米數量級。實驗設主要有邁克爾遜干涉儀、半導體激光器以及光電測尺等,見圖6。

實驗的基本過程如下:實驗前先將主機顯示部分的示數調整為0,設定激光器到探測頭的距離(如15 m)。首先調節干涉儀使得顯示的示數再次為零,然后調節干涉儀,使得示數變為某一數值時,記錄下干涉儀的實驗臺部分移動的距離,再調節探測頭主體部分的游標卡尺,使顯示的示數變為0并記錄下游標卡尺移動的距離,最后比較兩距離,得到其差值。改變激光器到探測頭的距離,進行多組測量實驗。
實驗中,共測量了3組數據,其中2組測量電流,1組測量電壓。經初步的數據分析和處理,可以得到如下結論。
對2組電流測量值分析可得:激光斑中心正對二象光電池的中心線時,電流表示數為0。證明本課題的題設結論成立。當激光斑照射到光電池表面的電極上(即白線附近)時,電流表的示數出現極小值。其原因是在白線附近,光電池表面涂滿了導電物質,而感光材料極少。由于測量時激光器的輸出功率不穩定,以及二象光電池的不均勻性,使得測量的結果不是很對稱,且數值浮動較大。
對電壓測量值分析可得:激光斑中心正對二象光電池的中心線時,電壓表示數為0。激光斑照射到光電池表面的電極上(即白線附近)時,電壓表的示數出現極小值。其原因是在白線附近,光電池表面涂滿了導電物質,而感光材料極少。電壓測量的結果比較對稱,且數值浮動較小,同時對激光器的輸出功率和二象光電池的均勻性要求也不高。
在實驗中使用的儀器為游標卡尺和干涉儀以及氦–氖激光器。其中,游標卡尺的精度為0.02 mm,干涉儀的精度為0.01 mm。在實際操作中,我們主要使用中心附近(電壓為0處)進行測量。所得數據如見表1。

表 1 測量距離與偏差
由表1可知,隨著測量距離的增加,偏差逐漸減少;當測量的距離在16 m左右時,測量結果最精確。
三、結論
結果表明,數字化顯示的光電測尺精確度高,調整結果直接和數字顯示聯系起來,結果一目了然;微電流數字化過程中使用放大電路,使調整更為方便、快捷且實際操作更為方便;數字化使集成體積更小,外形更為美觀,價格更為低廉,從而有利于產品的進一步研發和投入市場生產。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
