微型車電動助力轉(zhuǎn)向控制策略的研究與設(shè)計*
2011-10-27 08:39:22池保忠
外語與翻譯 2011年1期
池保忠
(江蘇廣播電視大學(xué)常熟學(xué)院,江蘇常熟215500)
微型車電動助力轉(zhuǎn)向控制策略的研究與設(shè)計*
池保忠
(江蘇廣播電視大學(xué)常熟學(xué)院,江蘇常熟215500)
微型車在實際駕駛的過程中隨車速的變化,駕駛員所需轉(zhuǎn)向力矩也在變化。EPS核心技術(shù)是EPS的控制策略,這種策略依然處于不斷的發(fā)展之中。本文在對EPS基本控制原理進(jìn)行充分研究的基礎(chǔ)上,對EPS具體控制模式進(jìn)行了系統(tǒng)分析,并設(shè)計了微型車EPS的具體控制策略。
微型車;電動助力轉(zhuǎn)向;控制策略
微型車在實際環(huán)境下的駕駛過程中,隨著其車速的快慢,車輛駕駛員所需要的相關(guān)轉(zhuǎn)向力矩也是不一樣的,具體表現(xiàn)如下:在進(jìn)行高速轉(zhuǎn)向時,駕駛員所需的力矩較小,而與之相對應(yīng)的是:低速轉(zhuǎn)向所需的力矩大。所以,應(yīng)該隨著車輛行駛和轉(zhuǎn)向狀態(tài)而改變EPS助力大小。電機(jī)助力特性指的是隨車輛受力狀況(轉(zhuǎn)向盤轉(zhuǎn)矩)和運動狀況(車速)的變化而變化的一般規(guī)律。對于電動助力轉(zhuǎn)向系統(tǒng)而言,直流電機(jī)電流與助力的關(guān)系是成比例的,所以,微型車的助力特性能夠引入變化關(guān)系曲線來進(jìn)行表示,此曲線是以轉(zhuǎn)向盤轉(zhuǎn)矩、車速與電機(jī)電流的關(guān)系而得出的。理想的助力特性能夠?qū)D(zhuǎn)向輕便性與操縱穩(wěn)定性的關(guān)系充分協(xié)調(diào),并提供給手動轉(zhuǎn)向與駕駛員一致的路感。
一、微型車電動助力轉(zhuǎn)向系統(tǒng)控制策略設(shè)計
EPS主要通過助力特性實現(xiàn)助力控制策略,EPS具有多種形式的助力特性,存在三種典型EPS助力特性,分別為:直線型助力特性、折線型助力特性與曲線型助力特性。直線型助力特性的特點是參數(shù)調(diào)整方便,實現(xiàn)簡單,控制系統(tǒng)設(shè)計容易,故廣泛應(yīng)用;曲線型助力實現(xiàn)方法復(fù)雜,系統(tǒng)設(shè)計也相對偏難,故在實際中應(yīng)用比較少見;折線型助力特性的優(yōu)勢與缺點介于上述兩者之間。
(一)電動助力轉(zhuǎn)向系統(tǒng)設(shè)計原則
在設(shè)計EPS系統(tǒng)助力特性時,應(yīng)該符合以下原則:
①在微型車的助力曲線中,由于難以避免轉(zhuǎn)向助力的死區(qū)。系統(tǒng)若處于轉(zhuǎn)向盤轉(zhuǎn)矩較小的區(qū)域內(nèi),是不會存在轉(zhuǎn)向助力的;此外,在汽車處于不同車速時,為保證足夠的路感,開始助力的時機(jī)也是不同的。
②為保證足夠的路感,應(yīng)隨著車速的不同而提供不同助力比的轉(zhuǎn)向助力區(qū)。
③為保持轉(zhuǎn)向過程的平穩(wěn)性,轉(zhuǎn)向助力隨轉(zhuǎn)向盤轉(zhuǎn)矩的減小而減小,同理,隨轉(zhuǎn)向盤轉(zhuǎn)矩的增大而增大。
④轉(zhuǎn)向助力在轉(zhuǎn)向盤轉(zhuǎn)矩已經(jīng)抵達(dá)事先設(shè)定好的限值之前,其值是一直保持不變的,這樣就形成了一個穩(wěn)定的轉(zhuǎn)向飽和區(qū),這個飽和區(qū)可以使由于電機(jī)的電流過大而導(dǎo)致控制器中的功率器件燒毀等事件的幾率大幅度降低。
⑤為了保證方向盤操作力不會出現(xiàn)跳躍感,助力特性曲線各區(qū)段過渡要平滑。
(二)電動助力轉(zhuǎn)向系統(tǒng)助力特性的具體設(shè)計
對于微型車EPS助力控制策略的設(shè)計,核心內(nèi)容是設(shè)計其助力特性,典型EPS助力特性有三種,分別是直線型助力特性、折線型助力特性和曲線型助力特性。結(jié)合課題實際開發(fā)的要求,通過對比研究上述三種典型助力特性,本文所設(shè)計的EPS助力控制采用直線型助力特性。在對EPS助力特性進(jìn)行設(shè)計時,主要對以下兩個層面進(jìn)行闡述:
①電機(jī)助力電流和轉(zhuǎn)向盤轉(zhuǎn)矩在某一特定車速下的關(guān)系;
②電機(jī)助力電流和轉(zhuǎn)向盤轉(zhuǎn)矩在不同車速下的變化關(guān)系。
圖1所示為典型的直線型助力特性曲線。

圖1 典型的直線型助力特性曲線
由圖可知,在微型車處于數(shù)據(jù)行使的某一車速下,且微型車轉(zhuǎn)向盤轉(zhuǎn)矩比門限值Td0的值要小時,系統(tǒng)所提供助力的值為0,也就是說不提供任何助力;而當(dāng)轉(zhuǎn)向盤的轉(zhuǎn)矩超越了Tdmax門限值的時候,處于保護(hù)電機(jī)的目的,設(shè)置系統(tǒng)助力的值為該車速下所能達(dá)到的最大值;當(dāng)轉(zhuǎn)向盤的轉(zhuǎn)矩處于圖中門限值Td0與Td max的數(shù)值之間時,轉(zhuǎn)向盤轉(zhuǎn)矩與系統(tǒng)助力之間的變化關(guān)系是線性的。對于直線型助力特性,當(dāng)確定了參數(shù)助力增益K(V)以及Td0和Tdmax之后,就可以確定整個助力特性曲線。
結(jié)合參考文獻(xiàn)[3]中的理論分析結(jié)果,并考慮到本文所研究的微型車的實際需要,本文確定以下的參數(shù):Td max=8Nm,Td0=2Nm,則可知助力恒定區(qū)的范圍在[8,15]Nm,轉(zhuǎn)向助力區(qū)的范圍在為[2,8]Nm,助力死區(qū)的范圍在[0,2]Nm,而高于15Nm的時候,系統(tǒng)助力會停止。EPS系統(tǒng)的靜態(tài)特性與K(V)關(guān)系密切,考慮到影響轉(zhuǎn)向阻力的因素很多,難以進(jìn)行精確確定,所以需要試驗調(diào)試結(jié)合理論分析來確定。
具體到本文所設(shè)計的EPS控制器,由于電動助力轉(zhuǎn)向系統(tǒng)是針對小排量微型車的,為了使EPS控制系統(tǒng)設(shè)計得到簡化,將車輛速度區(qū)分為無助力車速區(qū)和助力車速區(qū)的界限為車速80公里/小時。當(dāng)微型車處在無助力車速區(qū)時,系統(tǒng)助力將取消;而當(dāng)微型車的行駛處于助力車速區(qū)的時候,結(jié)合具體的轉(zhuǎn)向盤轉(zhuǎn)矩及車速信號,系統(tǒng)會為車輛確定相應(yīng)的助力值。
考慮到在實際情況中,高速轉(zhuǎn)向時阻力的變化較小,助力的變化比較緩慢,二低速轉(zhuǎn)向的時候想通阻力變化比較大,助力的變化也較快;本文在具體的設(shè)計中,對助力車速區(qū)進(jìn)行區(qū)分,共劃分為十七個速度區(qū),高速段速度區(qū)間取值大而低速段速度區(qū)間取值小,在設(shè)計中,劃分情況的實際值為:當(dāng)微型車的車速小于20公里每小時的時候,速度區(qū)間長度為2.5公里每小時;當(dāng)微型車的車速高于20公里每小時同時低于50公里每小時的時候,速度區(qū)間長度為5公里每小時;當(dāng)微型車的車速高于50公里每小時同時低于80公里每小時的時候,速度區(qū)間長度為10公里每小時,表1所示為詳細(xì)速度分區(qū)情況。
由表可知,這是考慮到微型車在實際行駛中,其行駛速度一般來講不會總是連續(xù)發(fā)生變化,最常見的情況是在車輛從一個速度變化到另一速度后,就會在一段時間內(nèi)維持這個相對穩(wěn)定的速度。
各速度區(qū)間端點處的助力增益系數(shù)通過理論分析進(jìn)行初步的確定,可通過插值的方法獲得速度區(qū)間內(nèi)助力增益系數(shù),考慮到插值算法的復(fù)雜程度及系統(tǒng)的要求,在本文的設(shè)計中,選用二次插值方法(即拋物線插值),插值公式如下:
式中,V表示任意車速,i(i=0,1,2…17)表示速度參考點上的相關(guān)增益系數(shù);VR代表車速參考點,K(V)的代表處于任意速度之下的助力增益系數(shù),VR=[V0,V1,V2…V17],KR代表車速參考點處助力增益系數(shù),KR=[K(0),K(1),K(2)…K(17)]。
確定微型車助力特性后,結(jié)合助力特性曲線函數(shù),即可對系統(tǒng)在任意轉(zhuǎn)向盤輸入轉(zhuǎn)矩、任意車速下的電機(jī)助力目標(biāo)電流進(jìn)行計算。
助力特性曲線函數(shù)表達(dá)式為:

其中,電機(jī)助力電流由Ia表示,電機(jī)的最大助力電流由參數(shù)Iamax表示,轉(zhuǎn)向盤的轉(zhuǎn)矩由參數(shù)Td表示,助力增益系數(shù)由參數(shù)K(V)表示,可知隨車速增加,K(V)會呈現(xiàn)逐步減小的變化趨勢;系統(tǒng)在開始助力時,由Td0表示其轉(zhuǎn)向盤轉(zhuǎn)矩,由Tdmax表示最大助力時的轉(zhuǎn)向盤轉(zhuǎn)矩。
二、微型車EPS回正控制策略的具體設(shè)計
在微型車操縱穩(wěn)定性中,轉(zhuǎn)向回正性能是一個非常重要的性能指標(biāo)。在微型車進(jìn)行轉(zhuǎn)向時,轉(zhuǎn)向盤在主銷后傾角和主銷內(nèi)傾角的作用下具有自動回正功能,而在微型車的駕駛員將轉(zhuǎn)向盤松開時,作用在轉(zhuǎn)向盤上力矩呈現(xiàn)出逐步減小的趨勢,隨著此趨勢,在自動回正力矩的作用下,轉(zhuǎn)向盤將回正。轉(zhuǎn)向盤在理想情況下,由于自動回正力矩的作用,會自行回到中間位置。但由于EPS系統(tǒng)中所增加減速機(jī)構(gòu)和電機(jī)等部件,不僅存在著彈性或間隙,還有摩擦和慣性等,有時候會致使轉(zhuǎn)向盤難以做到迅速準(zhǔn)確回到中間位置。
為使裝備EPS系統(tǒng)微型車回正性能提高,必須控制其回正過程。主要由兩部分組成轉(zhuǎn)向盤回正到中間位置的控制策略:一個策略是是低速回正控制,這種控制方式結(jié)合具體的低速轉(zhuǎn)向回正過程,在電機(jī)上施加一定的外轉(zhuǎn)矩,從而促使轉(zhuǎn)向盤準(zhǔn)確迅速的回到中間位置,又稱作回正助力控制;另一個策略是高速回正控制,這種控制方式結(jié)合高速轉(zhuǎn)向回正過程,以電機(jī)對系統(tǒng)所施加的的阻尼作用,在有阻尼的情況下使微型車回到中間位置,從而避免了擺振的發(fā)生,又稱作回正阻尼控制。
鑒于在微型車EPS產(chǎn)品開發(fā)中對系統(tǒng)可靠性的要求較高,本文所涉及的回正控制策略引入的是動力回正控制方案,圖2所示為其具體控制模式。
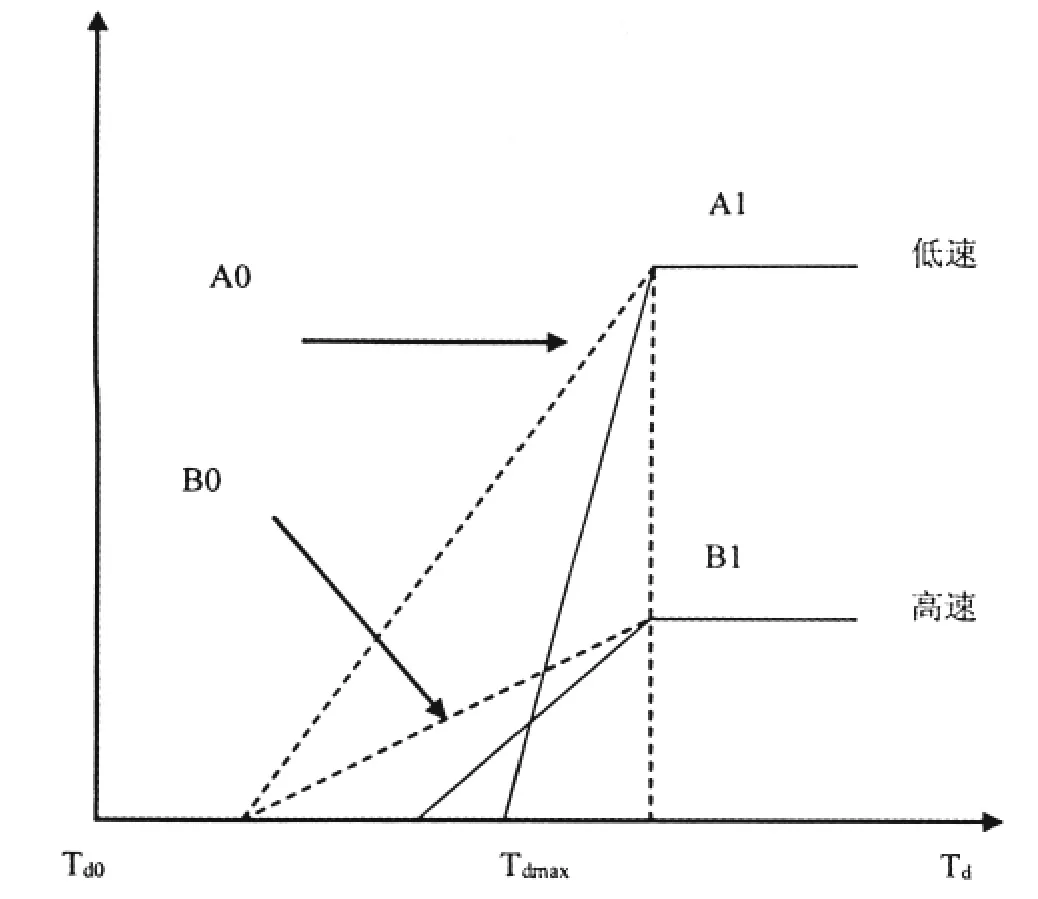
圖2 動力回正控制示意圖
動力回正控制方案與助力控制策略類似,結(jié)合微型車轉(zhuǎn)向回正時的轉(zhuǎn)向力矩,在整個回正過程為其提供成一定比例的回正控制力矩,這種模式可以不計車輛速度的變化,容易實現(xiàn),實現(xiàn)過程比較簡單。
轉(zhuǎn)向盤作用轉(zhuǎn)矩在車輛回正過程中逐漸減小,若仍然按圖中曲線AO和BO為助力特性曲線進(jìn)行控制,可能會導(dǎo)致高速時出現(xiàn)超調(diào),而低速時不能回到中間位置的情況發(fā)生。因此,在設(shè)計時應(yīng)注意,要根據(jù)回正特性來進(jìn)行回正控制電機(jī),高速時逐漸衰減助力電流,低速時迅速衰減助力電流,具體闡述如下:
(1)在微型車低速行駛時,為減輕回正操縱力及保證其回正的快速響應(yīng),以圖中回正曲線Al為模式,采用快速大電流回正;
(2)在微型車高速行駛時,為防止回正超調(diào)及提高其回正過程的操縱穩(wěn)定性,以圖中回正曲線Bl為模式,采用慢速小電流回正控制。
三、微型車EPS阻尼控制策略的具體設(shè)計
微型車EPS系統(tǒng)中,由于一些慣性如電機(jī)、減速機(jī)構(gòu)等的存在,使其慣性大于傳統(tǒng)機(jī)械式轉(zhuǎn)向系統(tǒng),轉(zhuǎn)向盤的瞬時角速度當(dāng)快速轉(zhuǎn)動轉(zhuǎn)向盤時會變得很大,電機(jī)在慣性的作用下,當(dāng)轉(zhuǎn)向盤不再轉(zhuǎn)動后也并未立即停止轉(zhuǎn)動,這種情況易造成車輛的轉(zhuǎn)向過多,會在車速較高時造成非常危險的狀況。故當(dāng)轉(zhuǎn)向盤轉(zhuǎn)動停止的時候,電機(jī)也應(yīng)立即停止轉(zhuǎn)動,需要通過EPS阻尼控制才能實現(xiàn)電機(jī)這種快速跟隨轉(zhuǎn)向盤停轉(zhuǎn)的性能。EPS系統(tǒng)以阻尼控制的方式,使車輛高速直線行駛穩(wěn)定性得到提高,使車輛高速行駛時出現(xiàn)橫擺振動得到抑制,防止回正超調(diào)或轉(zhuǎn)向過于靈敏,并使微型車高速直線行駛時快速轉(zhuǎn)向收斂性有所提高。
在阻尼控制實現(xiàn)方案中,圖3所示為其助力電機(jī)等效電路圖。
圖中,電機(jī)的端電壓表示為:Um=LdI/dt+RIm+E
電機(jī)的反電動勢可以表示為:E=Kbωm=Kbθm
感應(yīng)電動勢可忽略不計,上式可簡化為:Um=RIm+Kbωm
短路電機(jī)兩端,Um=0,此時得到電機(jī)轉(zhuǎn)矩:Tm=KaIm=-KaKbωm/R
其中,Um:電機(jī)端電壓;Im:電機(jī)電樞電流;Tm:電機(jī)電磁轉(zhuǎn)矩;L:電機(jī)電感;R:電機(jī)電樞電阻;Kb:反電動勢常數(shù);E:反電動勢;Ka:電機(jī)特性系數(shù);ωm:電機(jī)角速度;t:時間。
由以上分析可知,電機(jī)轉(zhuǎn)矩當(dāng)電機(jī)短路時表現(xiàn)為制動力矩,其大小與電機(jī)轉(zhuǎn)速成比例,方向與電機(jī)轉(zhuǎn)向相反。當(dāng)引入電機(jī)短路的模式實現(xiàn)阻尼控制時,阻礙電機(jī)繼續(xù)旋轉(zhuǎn)的阻尼轉(zhuǎn)矩由電機(jī)旋轉(zhuǎn)產(chǎn)生的反電動勢形成。通過分析EPS阻尼控制實現(xiàn)方案,當(dāng)EPS控制器輸出PWM信號使電機(jī)短路時,電機(jī)轉(zhuǎn)矩的作用即為制動力矩。本文的設(shè)計中,使功率管FET1和FET2在控制器輸出PWM信號作用下同時導(dǎo)通,從而實現(xiàn)短路電機(jī),控制電機(jī)阻尼轉(zhuǎn)矩。
四、轉(zhuǎn)向盤轉(zhuǎn)角估算算法的具體設(shè)計
上述EPS阻尼控制及回正控制實現(xiàn)方案中,均涉及到轉(zhuǎn)向盤轉(zhuǎn)角的計算,若裝備有轉(zhuǎn)角傳感器在EPS系統(tǒng)中,轉(zhuǎn)向盤轉(zhuǎn)速可通過對轉(zhuǎn)角傳感器信號進(jìn)行微分來獲取;若沒有裝備轉(zhuǎn)角傳感器在EPS系統(tǒng)中,則需要進(jìn)行預(yù)估,下面說明根據(jù)利用現(xiàn)有的傳感器信號,以電機(jī)的電壓和電流參數(shù)對電機(jī)角速度進(jìn)行估計,轉(zhuǎn)向盤轉(zhuǎn)角可以通過積分環(huán)節(jié)估計得到:
由式Um=RIm+Kbωm可得:

轉(zhuǎn)向盤角速度:ωsw=ωm/Gr
則θs=ωSW=ωm/Gr
對上市兩段進(jìn)行積分,即可得到轉(zhuǎn)向盤轉(zhuǎn)角的值,并用于確定阻尼控制及回正控制相關(guān)控制量。
[1]Y Tokunoto,M.Shiba.Development of Next-Generation Steering Sensor for Electric Power Steering[J].KOYO Engineering Journal English Edition,2008,(165):20-24.
[2]Yuji Kouzaki,Goro Hirose,etc.Electrical Power Steering(EPS)[J].NSK Motion&Control,2009,(6):9-15.
[3]肖生發(fā),瑪櫻,劉洋.電動助力轉(zhuǎn)向系統(tǒng)助力特性的研究[J].湖北汽車工業(yè)學(xué)院學(xué)報,2001,1S(3):34-37.
2011-02-22
池保忠(1978-),男,江蘇常熟人,講師,工程師,碩士。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
金橋(2020年9期)2020-10-27 01:59:44
中學(xué)生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
