火電機組協調控制中基于能量分析的鍋爐前饋研究
2011-11-15 08:24:44張永軍羅志浩
浙江電力 2011年11期
關鍵詞:指令
陳 波,張永軍,羅志浩
(浙江省電力試驗研究院,杭州 310014)
0 引言
火電機組的協調控制通過鍋爐主控回路和汽機主控回路中的反饋控制,保證機組在正常工況下負荷和汽壓在指定的位置。然而在負荷變動工況下,上述反饋控制將無法滿足負荷和汽壓參數的控制要求,必須通過前饋控制的手段予以改善。
前饋控制主要包括了兩個部分:靜態前饋和動態前饋。靜態前饋可根據各工況的靜態參數得出,本文所指前饋皆為動態前饋。其中作用于汽機主控回路中的汽機前饋用于釋放機組的蓄熱;作用于鍋爐主控回路中的鍋爐前饋用于克服燃料環節的滯后。因此鍋爐前饋往往被設計為根據負荷變化的微分生成,并加以適當的限制。當負荷開始改變時,鍋爐前饋產生;當負荷變化結束時,鍋爐前饋消失。然而諸如鍋爐前饋作用的大小、鍋爐前饋發生和復歸的時機、鍋爐前饋和負荷變動速率及變動范圍的關系等問題,則往往需要通過試驗進行確定和調整,具有較強的主觀性,并耗費了較長時間。因此需要找到一種有效的鍋爐前饋快速確定方法,以提高機組協調控制系統的調整效率。
1 鍋爐前饋作用的定性分析
當不存在擾動時,可以認為燃料量、蒸汽發生量和機組負荷存在確定的對應關系。假設燃料的化學能到電能之間的轉換是沒有滯后的,那么當負荷變動時,只需要根據確定的關系曲線對應調整鍋爐出力即可。然而在實際過程中,燃料的化學能到電能之間的轉換存在諸多環節的滯后,僅根據目標負荷確定的關系曲線對應調整鍋爐出力將無法滿足負荷控制的要求。因此需要通過前饋控制的方式來克服上述滯后,滿足控制要求。
1.1 機理性分析
以某機組的負荷上升曲線過程為例,通過能量平衡法對鍋爐前饋的作用原理進行分析,圖1為該過程中鍋爐前饋作用的原理及對比分析情況。
從圖1(a)中可以看出,在負荷上升過程中,當鍋爐指令完全按照負荷目標相對應基準指令曲線變化時,由于鍋爐指令轉換為實際負荷時存在滯后時間,實際負荷將滯后于負荷目標。因此,實際負荷和負荷目標之間的負荷偏差需要鍋爐指令的前饋控制予以修正。
在圖1(b)中,將鍋爐指令前饋控制需要修正的負荷偏差理解為一種能量,該能量可視為負荷變動過程中所需要的超前能量。考慮到鍋爐指令轉換為實際負荷存在滯后時間,在負荷變動的初期將依靠機組蓄熱來滿足該階段的能量需求。因此將上述超前能量劃分為S1和S2兩個部分,其中S1為機組蓄熱應滿足的部分,S2為鍋爐前饋應滿足的部分。將S2按照滯后關系對應至鍋爐指令中的S2′,將S1按照相似關系對應至鍋爐指令中的S1′,可以得出疊加理想鍋爐前饋后的鍋爐指令。
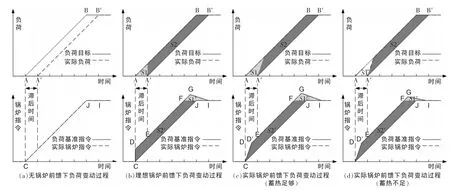
圖1 鍋爐前饋作用的原理及對比分析
由于鍋爐指令的變化速率受到了制粉系統、爐膛壓力等諸多因素的限制,在負荷變化的起始階段,鍋爐指令不可能以垂直上升的方式予以改變,而是按照允許的斜率完成變化,變化過程如圖1(c)所示。可以看出,當降低鍋爐指令的變化速率后,超前能量需求中的S1部分增加,即需要更大的機組蓄熱來完成負荷變動。
當機組蓄熱無法滿足超前能量需求中S1的增加部分時,實際負荷將不可能完全按照負荷目標曲線進行改變,如圖1(d)所示。在這種蓄熱利用不足的情況下,很容易出現由于協調控制系統中PID控制器對負荷和汽壓的修正導致實際負荷線的波動。
1.2 影響因素
假設機組蓄熱足以滿足負荷變動過程所需要的初期能量S1,對可能影響鍋爐前饋的因素進行定性分析,如圖2所示。
圖2(a)為影響因素分析的對比工況,對鍋爐前饋影響因素的分析均對比該工況進行,在分析過程中認為鍋爐指令的初期變化速率保持不變。
圖2(b)為鍋爐指令滯后時間延長后的鍋爐前饋情況,從圖中可以看出:負荷變動過程所需要的初期能量S1增加,機組蓄熱的要求增大;鍋爐前饋的最大幅度增加。
圖2(c)為負荷變動速率較慢的鍋爐前饋情況,從圖中可以看出:負荷變動過程所需要的初期能量S1減小,機組蓄熱的要求減小;鍋爐前饋的最大幅度降低。
圖2(d)為負荷變動幅度較小的鍋爐前饋情況,從圖中可以看出:負荷變動過程所需要的初期能量S1不變,機組蓄熱的要求不變;鍋爐前饋的最大幅度相同,前饋作用時間縮短。
綜上所述,鍋爐前饋的最大幅度和機組的蓄熱能力、負荷變動速率有關。鍋爐前饋的作用時間和負荷變動幅度、機組蓄熱的回補過程有關。
2 鍋爐前饋的定量計算
考慮機組蓄熱能力滿足負荷變動過程所需要的初期能量S1,以圖1(c)中的過程為例,對鍋爐前饋的相關特性進行定量計算。在計算中作如下定義和假設:鍋爐指令到負荷響應的滯后時間為t min;負荷和煤量對應關系為BD t/MWh;鍋爐指令所允許的最大變動速率為K MW/min;目標負荷變動速率為R MW/min;目標負荷變化幅度為M MW。
由上述假設計算可知:負荷變動過程所需要的初期能量 S1=KRt2/2(K-R)MW·min;鍋爐前饋所需要達到的理論最大高度h=RtB t/h;鍋爐前饋達到最大高度所需要的時間t1=RtB/K min;鍋爐前饋回頭時的理論時間范圍(M/R-t,M/R)min;鍋爐前饋回頭時的負荷指令和負荷目標之間的偏差范圍(0,Rt)MW。
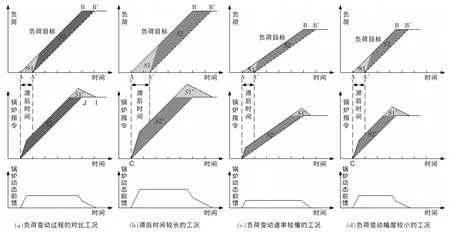
圖2 鍋爐前饋影響因素的對比分析
對于1臺600 MW的超臨界機組,可以近似認為1 MW的發電能力對應了0.42 t/h的燃煤消耗量,鍋爐滯后時間約為2.5~3 min。將其帶入上述計算公式,折算為燃料量的表征方式,計算結果如表1所示。
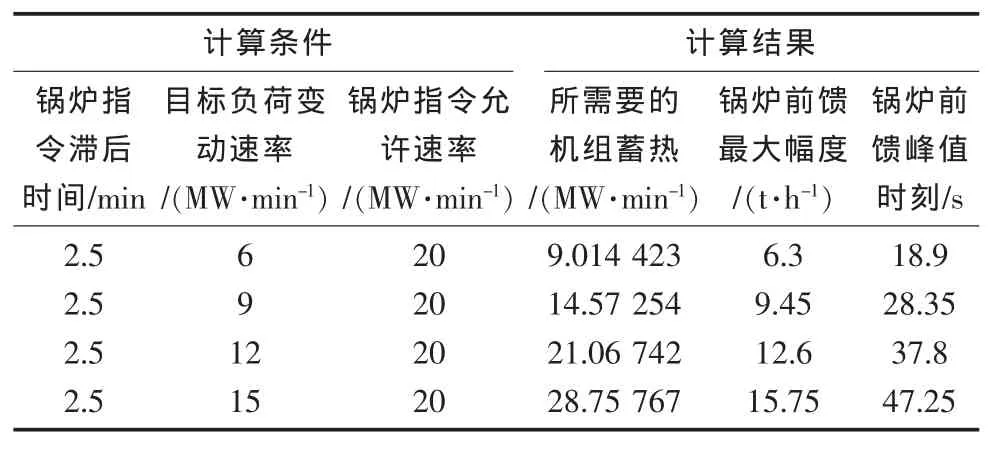
表1 鍋爐前饋定量計算表
根據表1中計算數據,對比國內某600 MW超臨界機組中鍋爐前饋的實際設置參數,可以得到圖3中所示對比結果。
圖3僅表示了實際過程中鍋爐基準前饋幅度和計算前饋幅度的對比情況,實際上鍋爐的前饋幅度還受到負荷偏差、壓力偏差、機組所處于的負荷段等因素修正。從圖3中可以看出,鍋爐前饋幅度的理論計算值和該機組實際運行數據基本一致。需要注意的是:
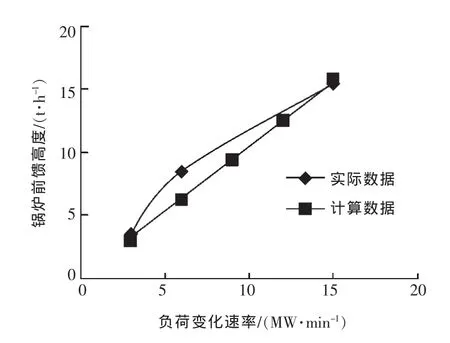
圖3 鍋爐前饋的理論計算高度和實際高度對比情況
(1)考慮到機組負荷變動階段燃燒效率下降的因素,理論計算值常常小于機組負荷變動的實際需要,因此圖3中主要偏差存在6 MW/min時,該速率為機組常用變負荷速率,在該速率下機組鍋爐前饋的實際值較高。
(2)考慮到機組在小速率變動時,鍋爐主控的自我調節能力可以修正負荷偏差;機組在大速率變動時,主要參數變化較大,需要限制前饋幅度等因素。在上述兩種情況下應做適當調整,機組鍋爐前饋的實際值較小。
(3)考慮到機組在不同負荷下,燃料和負荷的對應關系變化,實際過程中鍋爐前饋高度應根據負荷段予以修正。
3 實例分析
以某機組的實際負荷變化過程為例,分析鍋爐前饋對負荷變動過程中負荷偏差控制的影響。在負荷變動過程中負荷偏差可以分為:負荷變動的初期、負荷變動過程中和負荷變動結束時。其中:負荷變化初期,負荷偏差的控制完全依靠機組蓄熱的利用,調整鍋爐前饋的量值不能改變該階段下的負荷偏差,只能對后階段的負荷產生影響;負荷變動過程中,負荷偏差的控制主要和鍋爐前饋量值的大小、汽壓偏差等因素有關;負荷變動結束時,負荷偏差的控制主要和鍋爐前饋的回復時機、機組蓄熱的回補情況等因素有關。
圖4為某600 MW超臨界機組的兩次負荷變動過程,兩次過程的負荷變化幅度和變化速率相同。從圖中可以看出,鍋爐指令以及由鍋爐指令控制的燃料量等參數的變化形狀和理論分析結果相同。對比圖4中的A過程和B過程,可以得出:
(1)考慮到機組運行參數的平穩,負荷變動過程初期機組蓄熱利用不能過大,因此A過程和B過程負荷變動初期的負荷偏差基本相同,與鍋爐前饋無關。
(2)A過程中的鍋爐前饋初始階段變化斜率較快,鍋爐前饋量大于B過程,因此在負荷變動過程中,A過程中期的負荷偏差控制要優于B過程。
(3)當鍋爐前饋整定不合適時,會導致汽壓偏差的出現,從而反過來影響機組的鍋爐主控使得負荷偏差更加難以控制。A過程中鍋爐主控對壓力偏差的修正影響了燃料量,在前饋作用最大高度相同的情況下,A過程后期的負荷偏差要大于B過程。
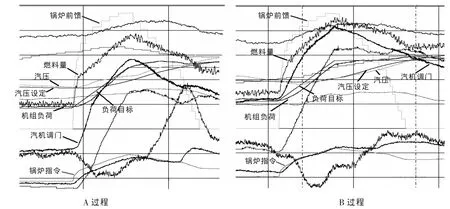
圖4 某600 MW超臨界機組的兩次負荷變動過程
4 結論
通過鍋爐前饋的理論研究,并結合對各典型機組實際負荷變化過程和調整過程的分析,可以得出如下結論。
(1)調整鍋爐前饋的作用幅度和速率不能解決負荷變動初期的負荷偏差控制,負荷變動初期的負荷偏差控制需要依靠機組蓄熱釋放完成。
(2)當機組蓄熱釋放過程和鍋爐前饋配合合適時,機組實際負荷的變化曲線將和負荷目標曲線平行變化,此時兩條曲線之間存在的負荷偏差取決于機組蓄熱的利用程度。
(3)當鍋爐前饋偏大時,機組實際負荷的變化曲線將在負荷變化的后期超越負荷目標曲線;當鍋爐前饋偏小時,機組實際負荷的變化曲線和負荷目標曲線的偏差將越來越大;總之當機組蓄熱釋放過程和鍋爐前饋不匹配時,均需要依靠鍋爐主控和汽機主控中的PID控制器予以修正,拉長了負荷變動的動態過程。
(4)機組蓄熱的釋放過程和主蒸汽壓力、主蒸汽溫度等主要參數直接相關,蓄熱釋放量越大,上述參數波動越大。因此機組蓄熱的利用程度需要綜合考慮機組參數波動的允許程度和負荷偏差的允許程度。
(5)在一定程度上主蒸汽壓力可以表征機組的蓄熱水平,機組蓄熱的調整幅度、回補過程與主蒸汽壓力的變化速率相關。考慮到負荷變動過程中主蒸汽壓力的變化速率遠低于機組的負荷變化速率,鍋爐前饋的回頭時間要早于理論分析時間,負荷變動后機組蓄熱的回補大多依靠鍋爐主控PID控制器對主汽壓力的修正予以完成。
(6)負荷變化過程中汽壓設定值的生成應和機組實際蓄熱水平的變化匹配,如不匹配,過程中產生的壓力偏差將影響鍋爐主控的輸出,從而對負荷控制造成擾動。在負荷變化初期,對主蒸汽壓力設定進行相應的反向調整;在負荷變化初期,當主蒸汽壓力和負荷變化方向相反時閉鎖主蒸汽壓力設定值;在負荷變化過程中,根據主蒸汽壓力判斷機組蓄熱水平,動態調整鍋爐主控PID控制器對壓力偏差的控制強弱,上述手段為常用調整方式。
[1]朱北恒.火電廠熱工自動化系統試驗[M].北京:中國電力出版社,2006.
[2]王家興,白焰.超臨界600 MW機組直流爐協調控制系統及AGC策略的改進與應用[J].熱力發電,2008(12):85-89.
[3]劉鑫屏,田亮,趙征,等.汽包鍋爐蓄熱系數的定量分析[J].動力工程,2008(4):216-220.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27
