基于T-S型模糊神經網絡的機械手控制方案設計研究
2011-11-20 07:43:03劉世聰
長江大學學報(自科版) 2011年10期
關鍵詞:結構
孫 超,劉世聰
(東北石油大學電氣信息工程學院,黑龍江 大慶 163318)
李 勇,周 慶,殷美艷
(大慶油田有限責任公司第三采油廠, 黑龍江 大慶 163113)
基于T-S型模糊神經網絡的機械手控制方案設計研究
孫 超,劉世聰
(東北石油大學電氣信息工程學院,黑龍江 大慶 163318)
李 勇,周 慶,殷美艷
(大慶油田有限責任公司第三采油廠, 黑龍江 大慶 163113)
機械手軌跡跟蹤控制問題在機器人研究領域占有舉足輕重的地位,現在已有很多控制方法,但是控制效果都不夠理想。設計了基于T-S型模糊神經網絡的機械手軌跡跟蹤控制方案,用改進自適應遺傳算法與BP算法相結合的混合學習算法來優化網絡的權值。仿真試驗表明,該控制方案能很好地控制機械手的軌跡跟蹤,因而是可行且有效的。
機械手;T-S型模糊神經網絡;BP算法;遺傳算法
機械手是一個多輸入多輸出、強耦合、高度時變和非線性的系統,已經被廣泛應用于各種智能控制的工業生產中,其中機械手軌跡跟蹤是研究熱點,近年來研究者已經提出許多機械手軌跡跟蹤控制方法,如傳統PID控制、計算力矩控制、魯棒控制[1]、變結構控制[2]、自適應控制、模糊控制和神經網絡等,但上述方法的控制效果都不夠理想。鑒于此,筆者對模糊神經網絡在2關節機械手控制中的應用進行了研究,給出一種基于T-S型模糊神經網絡的機械手軌跡跟蹤控制方案,用自適應遺傳算法(簡稱GA算法)與BP算法相結合的混合學習算法來優化網絡的權值,最后對機械手進行仿真。
1 機械手動力學模型及控制方案
1.1動力學模型
機械手的動力學方程[3]如下:

(1)


圖1 T-S模糊神經網絡控制系統結構
1.2T-S型模糊神經網絡控制方案
針對2關節機械手的數學模型,采用T-S模糊神經網絡控制系統結構如圖1所示。圖中qd1和qd2是2關節的期望位置;q1和q2是2關節的實際位置;e1、e2分別是2關節的誤差;ec1、ec2分別是相應的誤差變化率;ke1、ke2、kec1和kec2分別是誤差及誤差變化率的量化因子;ku1、ku2分別為神經網絡輸出的比例因子;
τ1、τ2分別是作用于關節1、關節2的轉矩。
2 T-S型模糊神經網絡結構和學習算法
2.1T-S型模糊神經網絡結構
T-S模糊神經網絡結構[4]如圖2所示。從圖2可以看出,該網絡由前件網絡和后件網絡2部分組成,前件網絡用來匹配模糊規則的前件,后件網絡用來產生模糊規則后件。前件網絡與標準模糊神經網絡類似。后件網絡由2個結構相同的并列子網絡組成,每個子網絡產生1個輸出量。后件網絡為1個3層網絡,第1層是輸入層,將輸入量傳入第2層,其中第0個節點的輸入值x0=1,用來提供模糊規則后件中的常數項。第2層是計算每條規則的后件,該層具有m個節點,每個節點代表1個規則,即:
yjk=p0jk+p1jke1+p2jkec1+p3jke2+p4jkec2j=1,2,…,mk=1,2
(2)
第3層是計算系統的輸出,即:
(3)

2.2T-S型模糊神經網絡學習算法

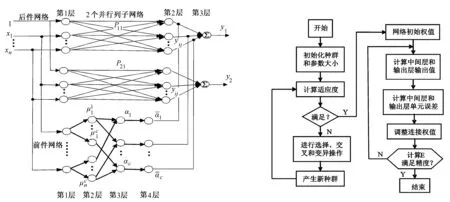
圖2 T-S模型的模糊神經網絡結構 圖3 混合學習算法的訓練程序流程圖
3 仿真試驗

(4)

對機械手軌跡跟蹤進行仿真試驗。仿真結果分別如圖4、5所示。圖4和 圖5分別給出了關節1和關節2的軌跡跟蹤曲線,其中實線為期望跟蹤曲線,虛線為采用混合算法的跟蹤曲線。從圖4和圖5可以看出,采用混合算法的跟蹤曲線很快跟蹤上期望曲線。仿真試驗表明,混合學習算法收斂速度快,具有較好的性能,對機械手的控制達到了預期的效果。
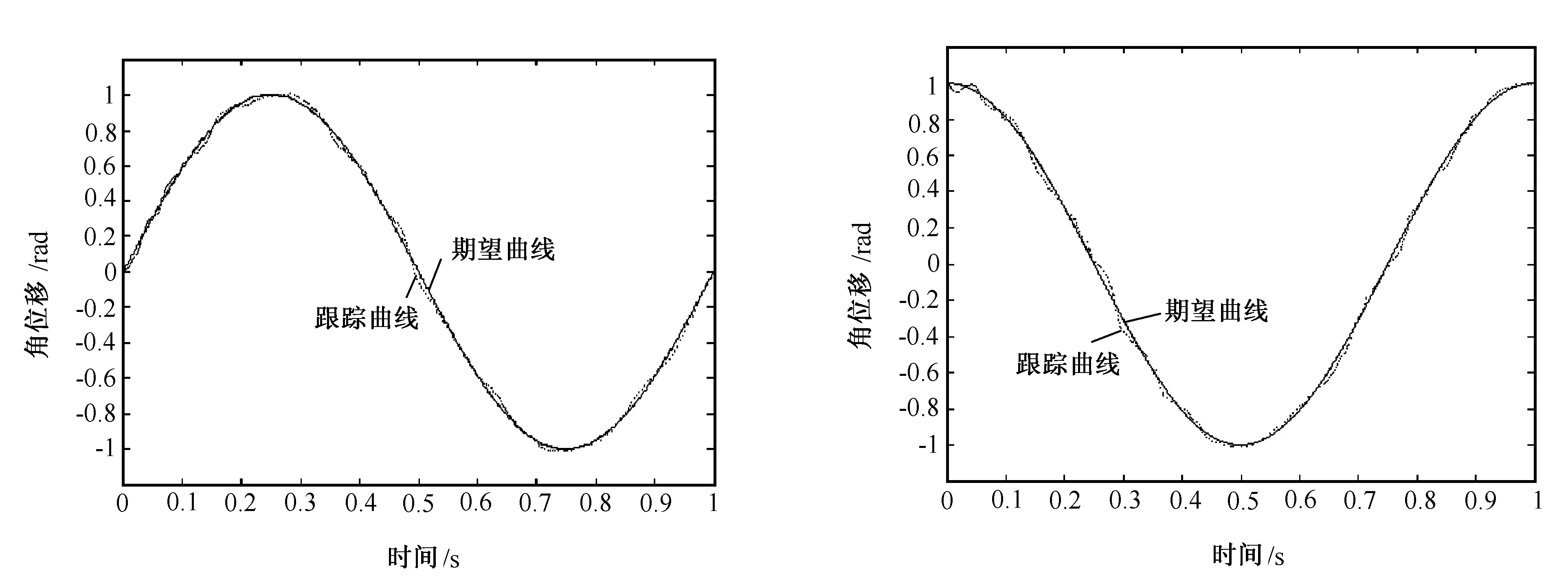
圖4 關節1的軌跡跟蹤曲線 圖5 關節2 的軌跡跟蹤曲線
4 結 語
提出了T-S模糊神經網絡的機械手軌跡跟蹤控制方案,并用改進的混合學習算法對網絡權值和閾值進行優化,最后對機械手軌跡進行跟蹤控制試驗。仿真結果表明,該控制方案能很好地控制機械手的軌跡跟蹤,因而是可行且有效的。
[1]朱甦,陳再良.二自由度機械手魯棒跟蹤控制器的一種設計方法[J].機械科學與技術,2006,25(2):189-191.
[2] 葉多芳,葛為民.四自由度機械手的滑模變結構軌跡跟蹤控制[J].制造業自動化,2009,31(6):6-8.
[3] 馮川,孫增圻,孫富春.機械手動態T-S神經模糊 控制器設計[J].清華大學學報(自然科學版),1998,45(1):73-76.
[4] 關學忠,劉鐵男.模糊控制理論與設計[M].哈爾濱:東北林業大學出版社,2003.
[編輯] 李啟棟
10.3969/j.issn.1673-1409.2011.04.029
TP241
A
1673-1409(2011)04-0089-03
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50