過載約束下的探月飛船再入軌跡的在線設(shè)計(jì)
2011-11-24 06:39:08李貴明劉良棟
空間控制技術(shù)與應(yīng)用 2011年1期
關(guān)鍵詞:指令
李貴明,劉良棟
(1.北京控制工程研究所,北京100190;2.空間智能控制技術(shù)重點(diǎn)實(shí)驗(yàn)室,北京100190)
過載約束下的探月飛船再入軌跡的在線設(shè)計(jì)
李貴明1,2,劉良棟1
(1.北京控制工程研究所,北京100190;2.空間智能控制技術(shù)重點(diǎn)實(shí)驗(yàn)室,北京100190)
研究了以第二宇宙速度返回地球的載人探月飛船的再入制導(dǎo)律設(shè)計(jì)問題.針對基于落點(diǎn)分析的數(shù)值預(yù)測-校正算法不能有效滿足再入過程的氣動過載約束條件的問題,提出一種基于解析計(jì)算的常值氣動過載算法與基于數(shù)值積分的預(yù)測-校正技術(shù)相結(jié)合的融合再入制導(dǎo)方案,在線生成了同時滿足過載約束和落點(diǎn)精度要求的再入軌跡.數(shù)值仿真表明提出的制導(dǎo)算法不僅能滿足達(dá)到高精度著陸的要求,還能滿足氣動過載約束要求.在一定的再入初始條件下,探月返回飛船可以不必采用邏輯復(fù)雜的阿波羅式跳躍再入方案.這一方案可為即將展開的載人探月活動制定月-地返回軌道和再入策略提供參考.
探月返回飛船;氣動過載;預(yù)測-校正制導(dǎo);常值過載制導(dǎo);綜合制導(dǎo)策略
自2004年美國提出轟動全球的“太空探索新構(gòu)思”[1]計(jì)劃后,新一輪太空探索競賽的帷幕漸漸拉開.目前,美國正在“星座計(jì)劃”的框架下,加緊研制新一代載人宇宙飛船—成員探索飛行器(CEV),即獵戶座(Orion).俄羅斯也推出自己的聯(lián)盟號載人飛船的接替者—快船號(Kliper).歐空局、日本和印度等也在加緊步伐,開始新一輪的探月競賽[2].
中國于2007年成功發(fā)射了嫦娥一號衛(wèi)星,標(biāo)志中國的探月工程進(jìn)入了實(shí)踐階段.隨著中國航天技術(shù)的進(jìn)步特別是載人航天事業(yè)和嫦娥工程的成功,有必要制定未來載人探月的相關(guān)設(shè)想和初步方案,為即要開展的載人探月工程奠定必要技術(shù)基礎(chǔ).
大氣層內(nèi)的氣動減速是返回過程中的關(guān)鍵階段,而制導(dǎo)、導(dǎo)航和控制分系統(tǒng)是此過程的中樞,負(fù)責(zé)再入飛船的姿態(tài)控制、軌跡規(guī)劃和軌跡跟蹤等核心技術(shù).一般來講,再入制導(dǎo)方法分為兩大類,即標(biāo)準(zhǔn)軌道法和預(yù)測制導(dǎo)法.其中,預(yù)測制導(dǎo)法是以消除實(shí)際軌道的預(yù)報落點(diǎn)和預(yù)定落點(diǎn)之間的偏差為目的的制導(dǎo)方法,該方法是在計(jì)算機(jī)內(nèi)存儲理論落點(diǎn)的特征參數(shù),根據(jù)導(dǎo)航平臺測量的飛行器的實(shí)際狀態(tài)參數(shù),實(shí)時進(jìn)行落點(diǎn)計(jì)算,并將計(jì)算的結(jié)果與理論落點(diǎn)進(jìn)行比較,形成的誤差控制信號輸入到計(jì)算機(jī)的制導(dǎo)方程,然后按照既定的制導(dǎo)規(guī)律控制傾側(cè)角,以實(shí)現(xiàn)精確著陸[3].
文獻(xiàn)[4]針對探月返回的低升力再入飛行器,設(shè)計(jì)了軌跡規(guī)劃和閉環(huán)制導(dǎo)相結(jié)合的預(yù)測—校正方法.在軌跡規(guī)劃階段,尋求滿足縱向航程條件的傾側(cè)角幅值,從而借助于數(shù)值預(yù)測方法,將一個單輸入非線性系統(tǒng)的控制問題,轉(zhuǎn)化為單變量非線性方程的尋根問題.文獻(xiàn)[5]提出一種 Motion Primitives算法和鄰近最優(yōu)控制算法,有效解決了航天飛機(jī)的靠近和著陸問題,并研究了任務(wù)失效情況下的在線軌跡重構(gòu)問題.針對航天飛機(jī)的再入制導(dǎo)問題,文獻(xiàn)[6]提出了一種嵌入路徑約束控制策略的預(yù)測—校正算法,利用數(shù)值積分運(yùn)算設(shè)計(jì)出了一種同時滿足末端約束和路徑約束的制導(dǎo)策略.
南英等[7]研究了多種不同條件下的最優(yōu)返回再入飛行軌跡設(shè)計(jì)問題.從熱量的角度指出,跳躍式再入比直接再入具有更好氣動加熱環(huán)境和更小的最大氣動熱流密度,因此更適用工程實(shí)踐.陸平等[4,8,9]認(rèn)為,當(dāng)執(zhí)行探月返回再入任務(wù)飛行器需要實(shí)現(xiàn)大飛行縱程時,跳躍式再入是唯一可行的方案.
直接利用基于落點(diǎn)分析的預(yù)測-校正再入制導(dǎo)算法設(shè)計(jì)的探月飛船再入軌跡,存在著過載峰值過大的問題.為此,本文利用數(shù)值預(yù)測算法得到的過載超限信息,引入基于解析算法的常值氣動過載減速步驟,生成恒定氣動過載減速制導(dǎo)律.當(dāng)后續(xù)飛行中的預(yù)測過載滿足要求時,將制導(dǎo)邏輯切換回基于落點(diǎn)預(yù)報的校正制導(dǎo)算法,直至達(dá)到開傘點(diǎn)高度.最后,對于給定的初始再入條件和終端要求,利用本文設(shè)計(jì)的融合制導(dǎo)算法能夠在線生成探月飛船再入軌跡.而且,本算法能統(tǒng)一處理有無跳躍階段的再入軌跡規(guī)劃問題,具有在線生成再入軌跡的能力,且能同時滿足落點(diǎn)精度要求和氣動過載的約束.
1 模型和問題
1.1 再入飛船質(zhì)心動力學(xué)
低升阻比的再入飛船以配平攻角飛行時,處于瞬時平衡狀態(tài),此時的控制變量為傾側(cè)角ζ[3].飛船再入制導(dǎo)的目標(biāo)即規(guī)劃合理的傾側(cè)角指令,使飛船沿著滿足各種路徑約束的再入軌跡,精確著陸于指定區(qū)域.為保證航天員生命安全,必須設(shè)計(jì)滿足過載要求的再入軌跡.
建立在地理坐標(biāo)系的再入動力學(xué)方程使用了一定的簡化和假設(shè),適用于初步設(shè)計(jì)再入軌道.這些基本假設(shè)有:地球是標(biāo)準(zhǔn)球體;航天器是質(zhì)量為m的點(diǎn)質(zhì)量再入器;航天器僅受空氣動力和行星引力作用.飛船再入動力學(xué)方程為[10]

式中,r為地心距,λ為經(jīng)度,φ為緯度,υ為速度,?為飛行路徑角,ξ為速度方位角,g為重力加速度.升力加速度L和阻力加速度D為上面兩式中ρ為大氣密度,S為飛船參考面積,m為飛船質(zhì)量,CL為升力系數(shù),CD為阻力系數(shù).

1.2 問題描述
在式(1)中,控制變量為飛船傾側(cè)角ζ.本文的設(shè)計(jì)目標(biāo)可以描述為:在一定的初始再入條件下,實(shí)時規(guī)劃合理的再入傾側(cè)角指令,使得在線生成的再入軌跡滿足一定的氣動過載要求,同時保證飛船的落點(diǎn)精度要求.
2 再入制導(dǎo)算法
本節(jié)首先簡要介紹預(yù)測-校正制導(dǎo)方法.針對其不能滿足過載約束條件的問題,我們研究并推導(dǎo)了常值氣動過載再入制導(dǎo)算法,給出了傾側(cè)角指令的表達(dá)形式.將常值氣動過載算法和預(yù)測-校正算法相結(jié)合,生成能同時滿足過載約束和著陸點(diǎn)精度要求的再入軌跡.
2.1 預(yù)測-校正再入制導(dǎo)
基于數(shù)值計(jì)算的預(yù)測—校正制導(dǎo)法,利用當(dāng)前的飛行條件,數(shù)值積分再入方程,利用落點(diǎn)預(yù)報進(jìn)行傾側(cè)角指令的修正,在線得到一條滿足落點(diǎn)精度要求的再入軌跡[11-12].下面詳細(xì)給出預(yù)測—校正再入制導(dǎo)的基本設(shè)計(jì)步驟.
在給定的傾側(cè)角指令ζ1作用下,利用當(dāng)前狀態(tài)信息,積分飛船質(zhì)心動力學(xué)方程,直到飛行高度h滿足

得到開傘點(diǎn)的經(jīng)緯度分別為λf和φf.式(4)中h0為開傘點(diǎn)高度.h=r-R,R為地球半徑.于是得到由當(dāng)前積分位置(λ,φ)到開傘點(diǎn)的縱向航程(預(yù)測縱程)為

式中β由下式得到

同理,可以利用公式(5)和(6)計(jì)算得到從當(dāng)前位置到目標(biāo)開傘點(diǎn)(λ0,φ0)的縱向航程 R0.那么在給定的傾側(cè)角指令下,縱程的預(yù)測誤差Rr為

如果Rr大于落點(diǎn)誤差上限值,則采用適當(dāng)?shù)恼{(diào)節(jié)機(jī)制改變傾側(cè)角指令值,重復(fù)計(jì)算上述步驟,直到得到適當(dāng)?shù)闹噶瞀?.如果Rr處于落點(diǎn)精度誤差范圍內(nèi),則認(rèn)為此時的傾側(cè)角指令ζ1是合適的,即將此指令ζ1發(fā)送給飛船控制系統(tǒng).下一個預(yù)測階段重復(fù)上述步驟.
在進(jìn)行縱向航程預(yù)測時,由于 L cosζ與傾側(cè)角指令的符號無關(guān),因此,上述縱向制導(dǎo)過程僅能決定傾側(cè)角指令的幅值.對于傾側(cè)角指令的符號,由下述的橫向制導(dǎo)策略[3]決定.
由于傾側(cè)角指令的符號決定了升力的方向,因此可以控制飛船的橫向運(yùn)動軌跡.一般選取飛船再入速度υ為變量,設(shè)置橫向航程約束Zs為一個漏斗形的邊界,即

式中k1和k2為待設(shè)計(jì)常數(shù).可見,邊界Zs隨著再入速度減小而減小.當(dāng)實(shí)際橫向航程的幅值達(dá)到漏斗邊界值時,立刻改變傾側(cè)角指令的符號,從而改變升力的方向,達(dá)到減小橫程誤差的目的.
當(dāng)需要調(diào)整傾側(cè)角指令幅值進(jìn)行縱向航程制導(dǎo)時,本文借鑒文獻(xiàn)[4]的研究成果,即利用正割法調(diào)整傾側(cè)角指令的幅值,其迭代關(guān)系式為

式中 xn=cosζn.
2.2 常值氣動過載再入制導(dǎo)
設(shè)飛船的飛行高度為h,由式(1)可知

式(10)對時間求導(dǎo),可得


式中 u=L cosζ.
設(shè)大氣密度ρ是高度的指數(shù)函數(shù),即

式中ρ0和 β為常值.對式(13)求導(dǎo),得

對式(3)求導(dǎo),則有

綜合式(1)和式(14),得到

考慮到氣動過載表達(dá)式為


考慮到式(1),可得

將式(12)代入式(19),即可解得縱向平面內(nèi)的升力加速度控制量u,即
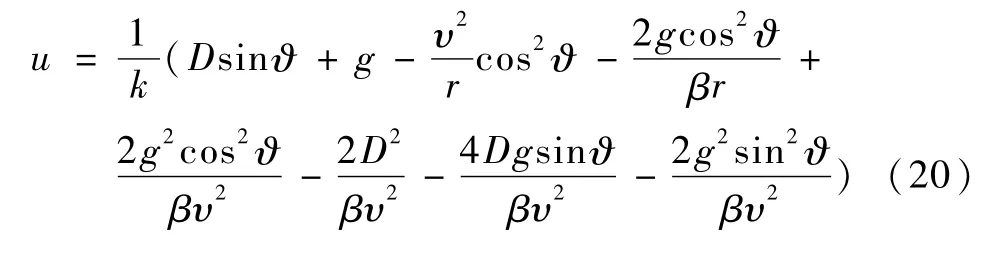
那么,維持飛船沿著常值氣動過載飛行時所需的傾側(cè)角指令幅值ζ2為

2.3 融合制導(dǎo)策略
融合制導(dǎo)策略首先啟動基于落點(diǎn)分析的預(yù)測—校正,預(yù)測整個再入飛行過程中是否存在氣動過載超標(biāo)問題.當(dāng)預(yù)測過載超出過載約束,即

即需要引入常值過載制導(dǎo)算法.通過常值過載制導(dǎo)算法,選取適當(dāng)?shù)脑偃雰A側(cè)角指令,使飛船沿恒定過載軌跡再入,并實(shí)時進(jìn)行系統(tǒng)狀態(tài)的更新.持續(xù)常值過載制導(dǎo)過程減速飛行,每間隔一定時間(本算法選擇10s)開啟一次預(yù)測—校正算法預(yù)測后續(xù)飛行中的過載,直到預(yù)測到的后續(xù)氣動過載峰值小于指標(biāo)要求的nmax為止.然后將制導(dǎo)邏輯切回預(yù)測—校正制導(dǎo)算法,直至達(dá)到開傘點(diǎn),結(jié)束再入軌跡規(guī)劃任務(wù).圖1詳細(xì)地描述了融合制導(dǎo)策略的流程.
注1.融合再入制導(dǎo)算法的目的在于采用允許的最大氣動過載進(jìn)行減速飛行,即以允許的最大制動消耗再入飛船的能量,使得后續(xù)的預(yù)測-校正制導(dǎo)算法不會再引入超出約束的氣動過載幅值.當(dāng)出現(xiàn)極端的再入條件,例如利用式(20)計(jì)算得到的u為

時,飛船無法提供必要的升力,因此,只能采用最大升力狀態(tài)過載飛行,即ζ=0.由此可見,融合再入制導(dǎo)算法僅能在一定初始再入條件范圍內(nèi)解決過載約束問題.
注2.融合再入制導(dǎo)算法能在線設(shè)計(jì)出同時滿足氣動過載和著落精度要求的再入軌跡,但數(shù)值積分運(yùn)算對船載控制計(jì)算機(jī)的運(yùn)算能力提出了較高的要求.
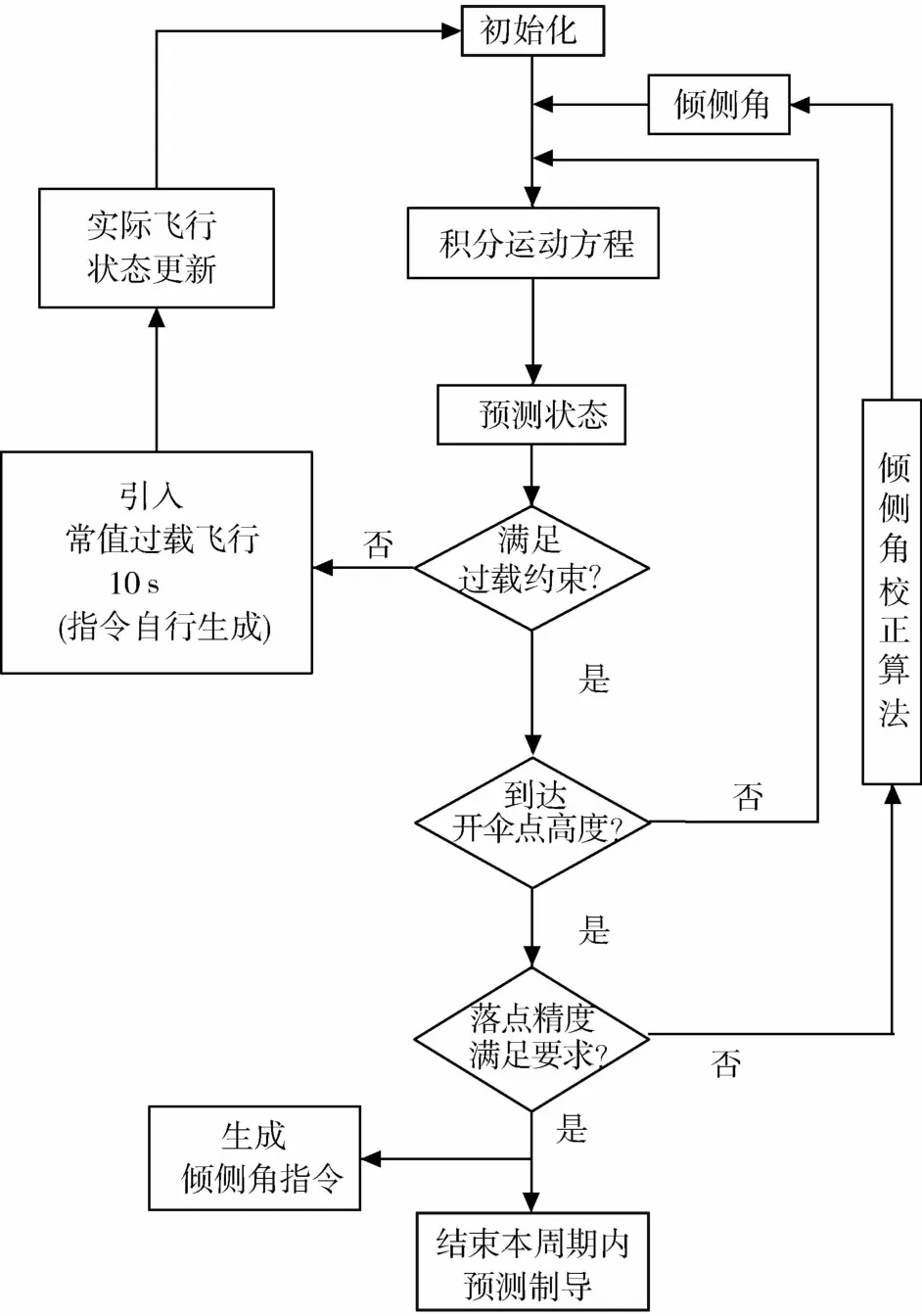
圖1 融合算法的流程示意
3 數(shù)學(xué)仿真
設(shè)飛船的再入初始條件為:再入初始高度80km,初始速度為11.032km/s,再入點(diǎn)經(jīng)度為東經(jīng)118.5°,北緯 11.0°,初始飛行路徑角為 -3.8255°,初始速度方向角為 3.3687°.開傘點(diǎn)距地面高度10km,位置為東經(jīng) 112.1°,北緯 42.3°.設(shè)定最大氣動過載指標(biāo)nmax為4.5g.針對本文的初始條件,再入初期預(yù)測出存在過載超標(biāo)(6.3g)后,在再入初期給定0°傾側(cè)角指令幅值,然后向飛船發(fā)出此指令,直到飛行至最大過載(4g).從此刻起,引入常值過載算法,使飛船以常值過載狀態(tài)再入飛行,每10s運(yùn)算一次預(yù)測-校正制導(dǎo)算法,直到預(yù)測的氣動過載峰值滿足約束條件為止.然后啟動預(yù)測—校正算法,直至飛行任務(wù)結(jié)束.仿真結(jié)果如圖2~5所示.

圖2 探月飛船的再入過載值

圖4 探月飛船的再入傾側(cè)角指令
圖2中的虛線描述了僅利用預(yù)測—校正算法時的再入過載.由曲線可知,再入過程的最大過載超出了指標(biāo)要求,峰值達(dá)到了6.3g,并且超標(biāo)情況前后出現(xiàn)兩次.融合制導(dǎo)策略描述的再入軌跡的過載由圖2中的實(shí)線表示.由仿真曲線可知,融合了恒值過載限制的預(yù)測—校正算法,保證了在再入峰值將超出要求時,通過調(diào)整初期和前期傾側(cè)角指令使過載值處于設(shè)計(jì)恒定值附近,有效解決了再入峰值過大的問題.

圖5 探月飛船再入的星下點(diǎn)軌跡
圖3和圖4分別描述了再入傾側(cè)角指令和再入飛行高度,其中傾側(cè)角符號在整個再入過程中反轉(zhuǎn)了6次;再入飛行高度存在著跳躍的趨勢,但并沒有彈出大氣層.事實(shí)上,當(dāng)再入航程相對較小時,就會出現(xiàn)跳躍階段.圖5描述了飛船再入飛行的星下點(diǎn)軌跡,計(jì)算結(jié)果表明開傘點(diǎn)的精度約為0.5km.
仿真結(jié)果證實(shí),飛船的再入結(jié)果滿足過載約束和著陸精度要求,說明結(jié)合恒值過載與預(yù)測—校正法的融合制導(dǎo)策略對于存在過載約束的探月飛船的再入軌跡在線設(shè)計(jì)問題有效.
注3.本文的算法采用三自由度的質(zhì)心再入動力學(xué)模型,因此沒有考慮到飛船姿態(tài)調(diào)節(jié)過程,即傾側(cè)角指令的翻轉(zhuǎn)過程對再入軌跡規(guī)劃的影響.因此,適用于再入軌跡的初步設(shè)計(jì).預(yù)測-校正制導(dǎo)的在線能力保證了本文算法在大氣密度攝動、初始條件偏差和風(fēng)速影響條件下仍然有效.
注4.跳躍式再入比直接再入具有更好氣動加熱環(huán)境[7];當(dāng)執(zhí)行探月返回再入任務(wù)飛船需要實(shí)現(xiàn)大飛行縱程時,跳躍式再入是可行的方案[8].但跳躍式再入一般涉及到復(fù)雜的邏輯過程,較彈道式再入的工程實(shí)踐難度大.實(shí)際上,跳躍式再入方案最終也沒有用于阿波羅飛船的探月返回飛行任務(wù).本文的算法的優(yōu)勢還在于可根據(jù)系統(tǒng)的實(shí)際條件在線規(guī)劃再入軌跡,統(tǒng)一處理含跳躍階段和不含跳躍階段的情形.根據(jù)仿真結(jié)果可知,適當(dāng)?shù)脑碌胤祷剀壍涝O(shè)計(jì)方案將帶來良好的再入初始條件,更利于再入制導(dǎo)律的優(yōu)化設(shè)計(jì).
4 結(jié) 論
探月返回飛船具有再入初始速度大、氣動過載嚴(yán)重的特點(diǎn),要求針對這些問題提出行之有效的再入制導(dǎo)算法,控制飛船沿著合理的再入軌跡抵達(dá)預(yù)定的開傘點(diǎn).本文在采用合理的近似假設(shè)的前提下,提出了基于解析計(jì)算的恒值過載算法和基于數(shù)值積分預(yù)測—校正算法相結(jié)合的融合制導(dǎo)策略,能有效解決探月飛船的再入制導(dǎo)問題,可保證飛船控制系統(tǒng)能在線設(shè)計(jì)同時滿足過載要求和著陸精度要求的再入軌跡.仿真結(jié)果說明了本文方法的有效性.從過載的角度看,在一定的再入初始條件下,探月返回飛船可不采用跳躍式再入.
[1]Bush G W, Remarks at the national aeronautics and space administration [J].Week ly Compilation of Presidential Documents, 2004, 40(3): 66-68
[2]魏晨曦.美國“獵戶座”飛船新進(jìn)展[J].國際空間,2007(1):5-8
[3]趙漢元.飛行器再入動力學(xué)和制導(dǎo)[M].長沙:國防科技大學(xué)出版社,1997
[4]Brunner CW,Lu P.Skip entry trajectory planning and guidance[J].Journal of Guidance, Control and Dynam ics, 2008, 31(5): 1210-1219
[5]Jiang Z S,Ordonez R.On-line robust trajectory generation on approach and landing for reusable launch vehicles[J].Automatica, 2009, 45(7): 1668-1678
[6]Joshi A,Sivan K.Predictor-corrector reentry guidance algorithm with path constraints for atmospheric entry vehicles[J].Journal of Guidance, Control and Dynamics, 2007, 30(5): 1842-1847
[7]南英,陸宇平,龔平.登月返回地球再入軌跡的優(yōu)化設(shè)計(jì)[J].宇航學(xué)報,2009,30(5):1842-1847
[8]陸平,朱亮,敬忠良,胡世強(qiáng).探月返回跳躍式再入制導(dǎo)[C].第十三屆空間及運(yùn)動體控制技術(shù)學(xué)術(shù)年會,武夷山,2008
[9]Lu P.Predictor-corrector entry guidance for low-lift vehicles[J].Journal of Guidance, Control and Dynamics, 2008, 31(4): 1067-1075
[10]王希季.航天器進(jìn)入與返回技術(shù)(上)[M].北京:宇航出版社,1991
[11]胡軍.載人飛船一種混合再入制導(dǎo)方法[C].第八屆空間及運(yùn)動體控制技術(shù)學(xué)術(shù)年會,黃山,1998
[12]李惠峰,張蕊.探月飛船預(yù)測-校正再入制導(dǎo)律設(shè)計(jì)[J].空間控制技術(shù)與應(yīng)用,2009,35(1):19-24
On Line Design of Reentry Trajectory under Aerodynam ic Acceleration Load Constraint of a Lunar Vehicle
LIGuiming1,2, LIU Liangdong1
(1.Beijing Institute of Control Engineering, Beijing 100190,China;2.Science and Technology on Space Intelligent Control Laboratory, Beijing 100190,China)
In this paper a guidance algorithm is presented to address the reentry problem of a lunar returning vehicle at the second cosmic velocity.The predictor-correctormethod based on the accurate landing target location cannot meet the aerodynam ic acceleration load constraint in general.For this technical problem,we combine the predictor-corrector method and a constant acceleration load method,and propose an integrated reentry guidance strategy.The improved scheme is based on real-time trajectory planning and generates a feasible trajectory during the reentry flight,thus satisfying both term inal path constraint and aerodynam ic load constraint.Numerical simulation results are presented to demonstrate the effectiveness of the proposed scheme.It is shown from this presented study that if the initial reentry condition is selected appropriately,the skip trajectory entry guidance algorithm may not use the Apollo's scheme which has a very comp licated logical technique.This work is of benefit to the design ofmoon to earth trajectory and the reentry strategy of our upcom ing manned moon landing project.
lunar returning vehicle; aerodynam ic acceleration load; predictor-corrector guidance; constant acceleration load guidance;integrated guidance strategy

V448.235
A
1674-1579(2011)01-0006-05
10.3969/j.issn.1674-1579.2011.01.002
2010-07-10
李貴明(1983—),男,黑龍江人,博士研究生,研究方向?yàn)楹教炱髯藨B(tài)控制、協(xié)同控制理論與應(yīng)用(e-mail:hitlgm@gmail.com).
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(xué)(2016年10期)2016-11-23 05:11:56
時代農(nóng)機(jī)(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學(xué)院學(xué)報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27