一種高性能EtherCAT實時以太網從站的設計
2011-11-24 07:03:26施大發劉建林阮倩茹
湖南師范大學自然科學學報 2011年3期
施大發,劉建林,王 輝,阮倩茹
(1. 湖南機電職業技術學院電氣工程系,中國 長沙 410151;2. 湖南大學電氣與信息工程學院, 中國 長沙 410082)
EtherCAT(Ethernet for Control Automation Technology)是由德國自動控制公司Beckhoff開發的一種工業以太網技術,它基于標準的以太網技術,采用靈活的網絡拓撲結構,具有配置簡單、有效數據率高、全雙工、易于實現等特性.EtherCAT可以用簡單的線性拓撲結構來取代以太網常用的星形結構,也可以采用“傳統”方式,即采用網絡交換機進行布線,以便整合其他的以太網設備.主站無須專用接口卡,只需采用標準以太網卡即可實現與任何一臺以太網控制器的連接.因此EtherCAT技術出色的性能打破了傳統現場總線的瓶頸,實現了一種與現代工業PC的強大運算能力相匹配的通信技術[1].EtherCAT也非常適用于小型和中型的控制領域,從而為分布式I/O開辟了新的應用領域.
1 EtherCAT工作原理
EtherCAT采用主從式結構,主站PC機采用標準的100Base-TX以太網卡,從站采用專用芯片.系統控制周期由主站發起,主站發出下行電報,電報的最大有效數據長度為1498字節.數據幀遍歷所有從站設備,每個設備在數據幀經過時分析尋址到本機的報文,根據報文頭中的命令讀入數據或寫入數據到報文中指定位置,并且從站硬件把該報文的工作計數器(WKC)加1,表示該數據被處理.整個過程會產生大約10 ns的時間延遲.數據幀在訪問位于整個系統邏輯位置的最后一個從站后,該從站把經過處理的數據幀做為上行電報直接發送給主站.主站收到此上行電報后,處理返回數據,一次通信結束[1].系統結構原理圖如圖1所示:
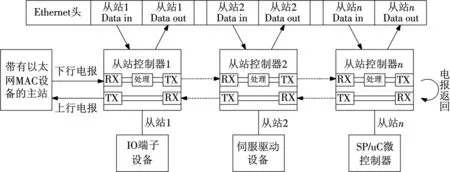
圖1 EtherCAT工作原理
2 EtherCAT實時以太網從站總體方案設計
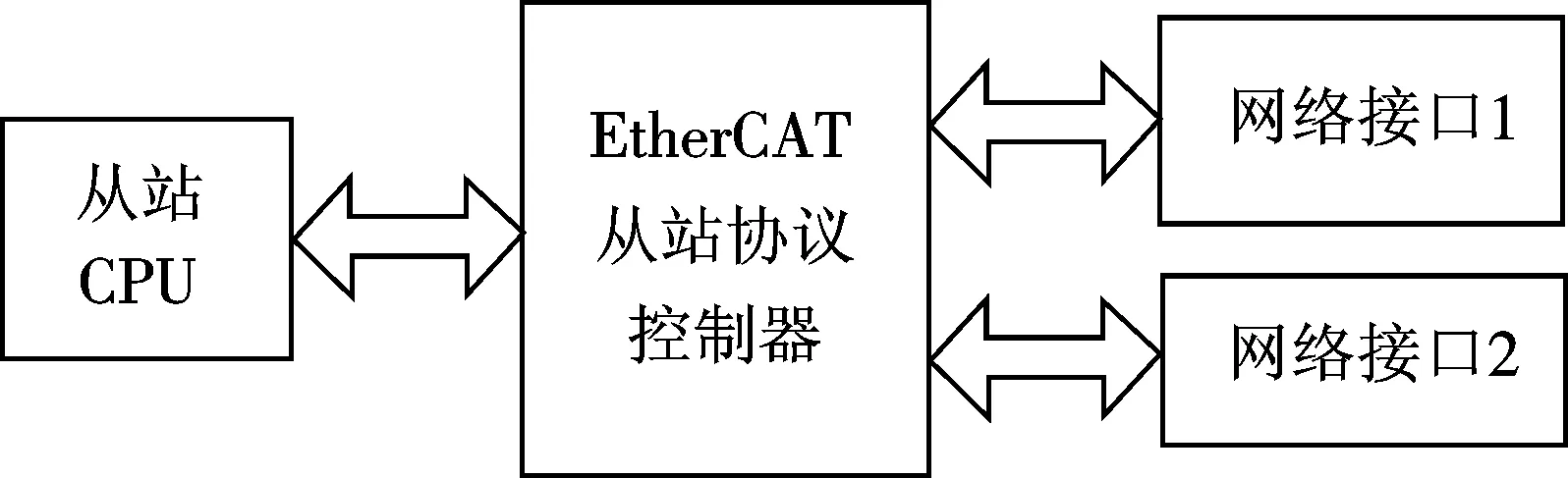
圖2 EtherCAT系統從站硬件結構圖
設計的EtherCAT從站節點硬件包括從站協議控制器、從站CPU和網絡接口等部分[2].EtherCAT從站中最關鍵部分是EtherCAT協議控制器,它實現EtherCAT的物理層與數據鏈路層的協議.現在市場上有多種EtherCAT協議控制器可供使用,如FPGA實現和ASIC實現.接口連接方式根據PDI的形式來確定.其中從站CPU實現EtherCAT對現場任務的收集與調度;EtherCAT從站控制器實現EtherCAT協議;EEPROM用于保存從站配置數據和從站描述數據;網絡接口用于主從站之間或從站與從站之間的連接,根據EtherCAT從站控制器的不同網絡接口可以分別為2~4個,網絡接口采用標準以太網物理層器件就可以.從站的硬件實現如圖2所示.
3 基于ET1100的EtherCAT從站結構設計
3.1 從站控制器ET1100的內部結構
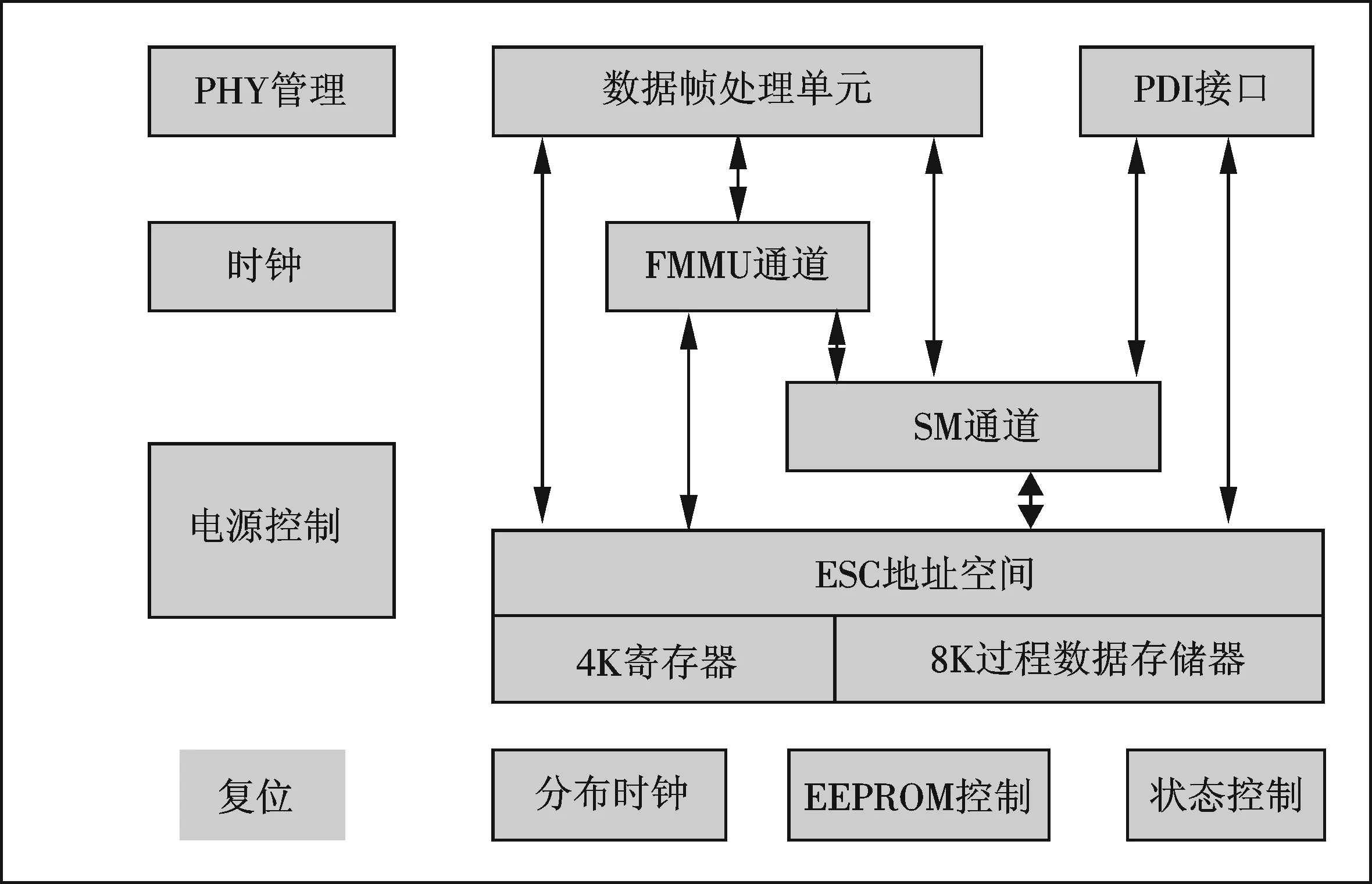
圖3 ET1100的內部結構功能圖
ET1100是一款強大的EtherCAT從站控制器ESC專用芯片,具有豐富的接口資源.它具有4個數據收發端口、8個FMMU單元、4KB控制寄存器、8KB過程數據存儲器、支持64位的分布時鐘功能.其內部功能結構如圖3所示.
3.2 基于ET1100的從站硬件結構設計
圖4是采用Beckhoff公司的ET1100作為工業以太網EtherCAT協議通訊控制器來設計的從站[3-4].ET1100帶有2個MII接口,它們在硬件上實現了EtherCAT協議的數據鏈路層,外擴的2個物理層芯片實現了工業以太網的的物理層.網絡接口由PHY和網絡變壓器組成,其中網絡變壓器的作用是實現隔離和阻抗匹配,主站PC與從站的數據通訊速率可達到100 Mbit/s[5].
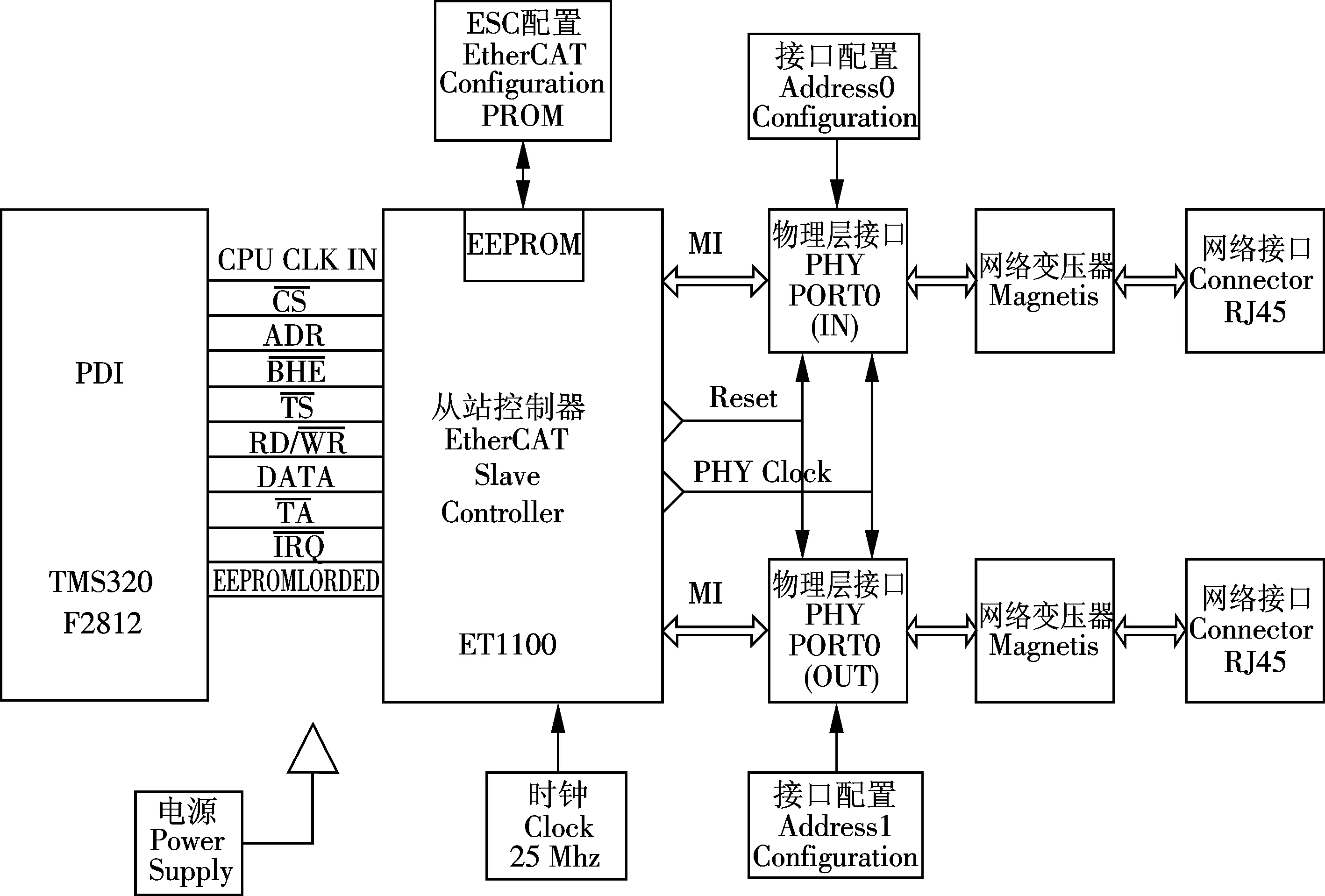
圖4 基于ET1100的EtherCAT從站結構框圖
3.3 MII接口與EBUS接口
ET1100有4個物理通信端口,分別命名為端口0到端口3,每個端口都可以配置為MII接口或EBUS接口兩種形式.ET1100使用MII接口時,需要外接以太網物理層PHY芯片.PHY PORTS可由KS8721BL芯片來實現功能,PHY與ET1100之間是通過MII接口來連接的,為了降低處理/轉發延時,ET1100的MII接口省略了發送FIFO.具體連接方式如圖5所示[6].
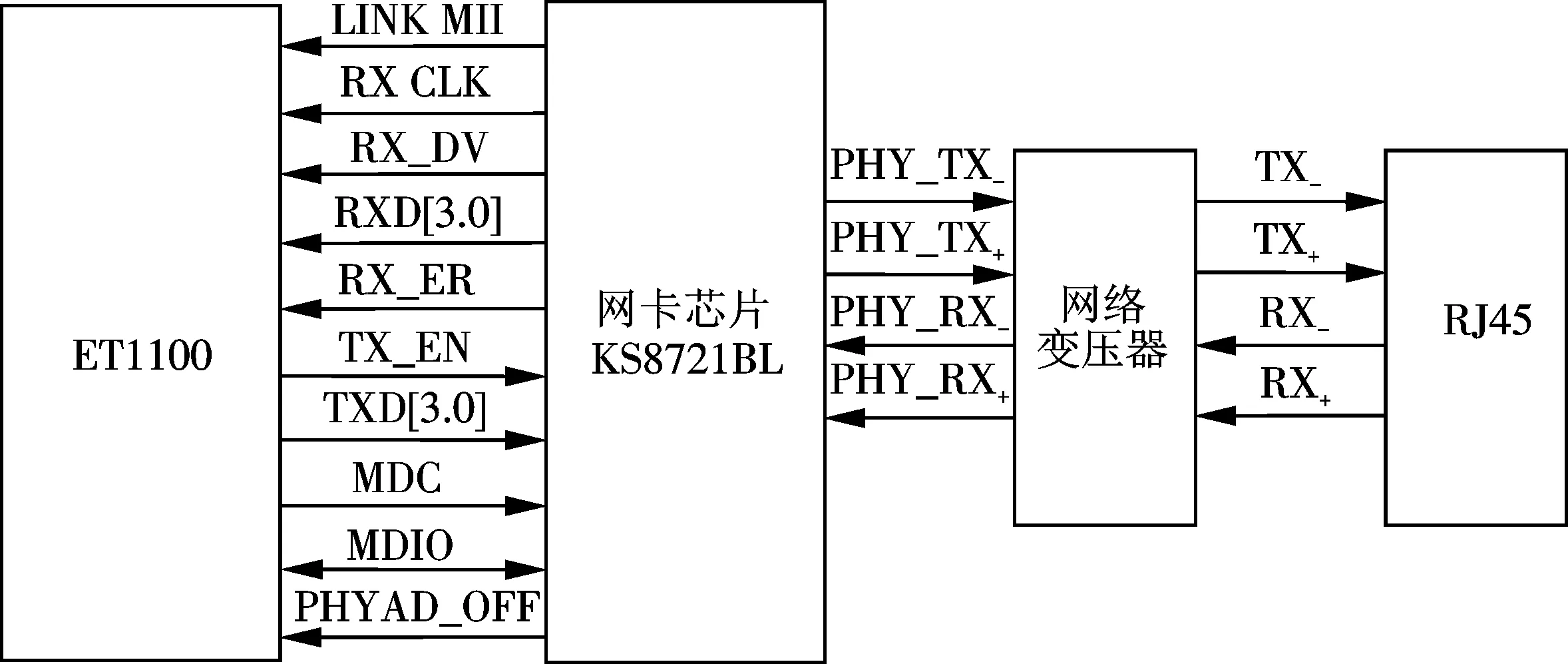
圖5 ET1100 MII接口連接圖
3.4 EEPROM接口
EtherCAT從站控制器(ESC)提供多種接口規范, ESC與主機設備之間的接口方式根據過程數據接口PDI的形式確定(表1).
其中,I/O方式無需主機CPU;SPI方式用于數據量較小的過程數據設備,如數據采集監控等;微處理器方式適用于現場控制,尤其是數據量較大的復雜設備.在本系統中,從站控制器采用倍福公司的ET1100.ET1100從站控制器提供3種接口規范:32位數字量輸入/輸出方式;8/16位同步/異步微處理器方式;串行總線SPI方式.由于電機采用TMS320F2812控制,其接口規范可選擇微處理器方式,對ET1100自帶的EEPROM進行編程后選擇配置.控制器的EEPROM硬件連接如圖6所示.
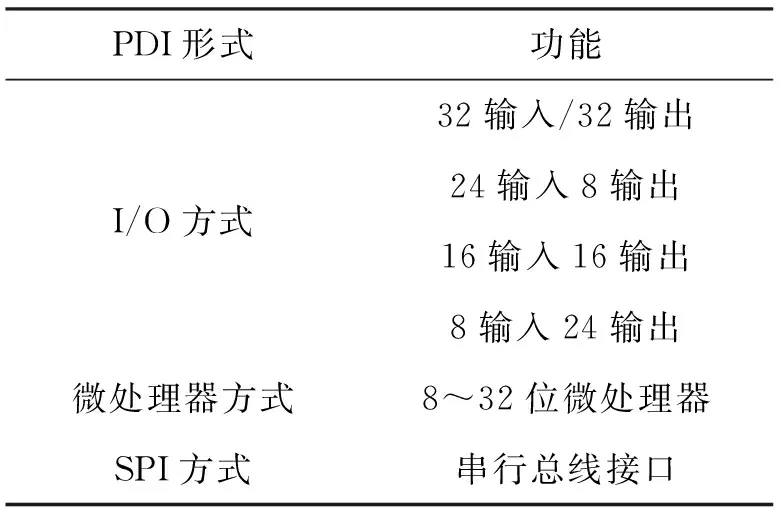
表1 ESC接口規范
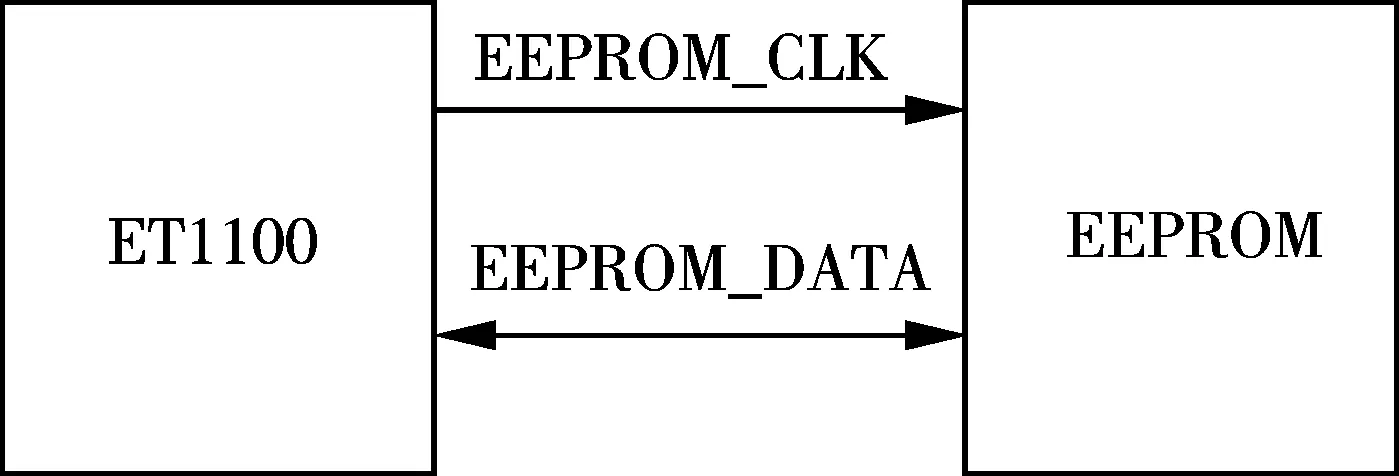
圖6 ET1100與EEPROM的連接圖
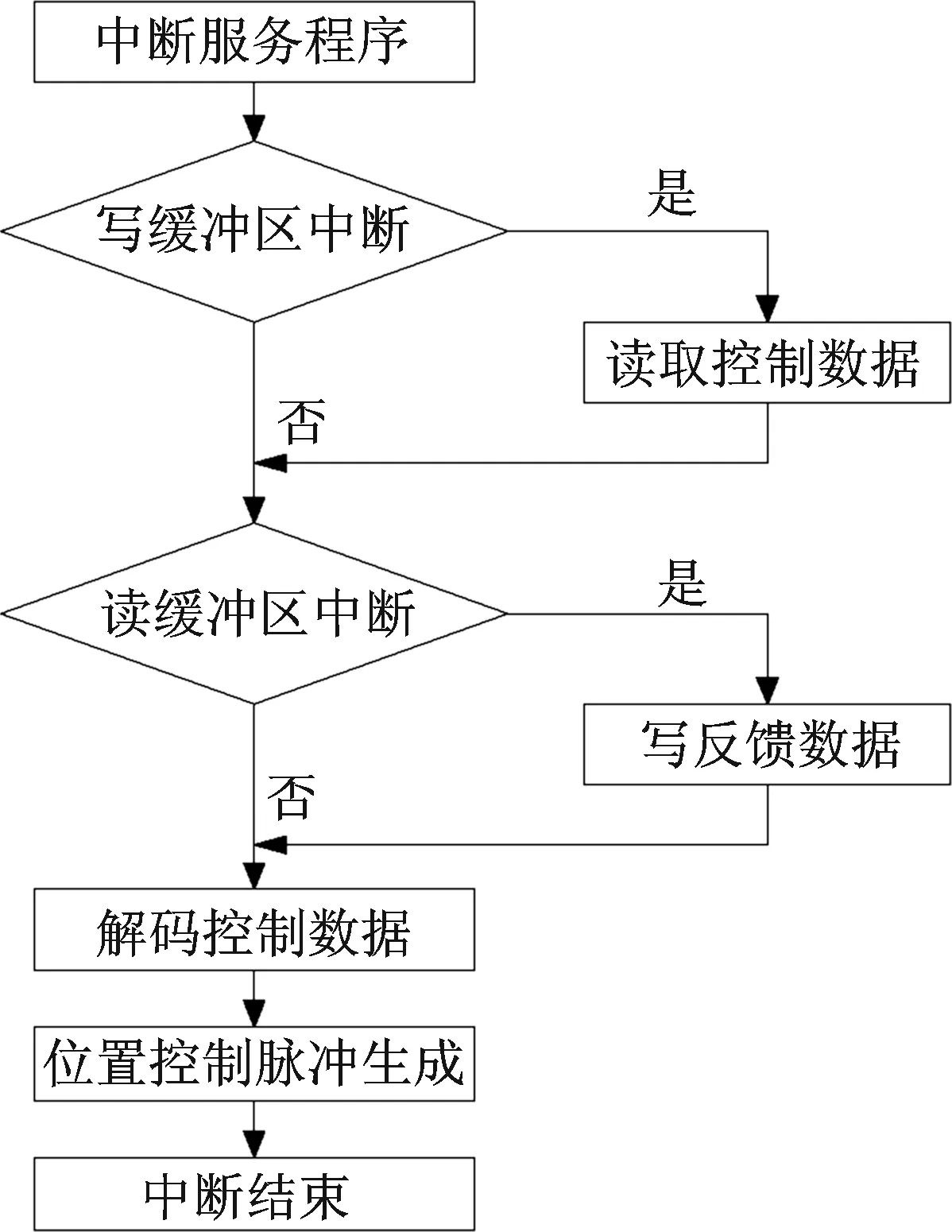
圖7 從站程序中斷流程圖
3.5 EtherCAT從站軟件設計
從站控制器內部有64 kB的內存空間,其中前4 kB(0x0000.0x0FFF)作為寄存器空間;其余的60 kB作為數據交換使用.從站控制器與主站交換有2種形式的數據,一種是周期性數據,一種是非周期性的數據.周期性數據傳輸可以采用緩沖區方式,任何一方在任何時間都可以訪問此方定義的內存,得到最新的數據;非周期性數據的傳輸采用握手方式(郵箱方式)實現,一方寫入數據到定義的內存,只有完成定義內存的最后一個字節的寫入,另一方才能開始從定義內存中讀取數據,而且只有在讀出定義內存的最后一個字節數據后,才能重新寫入數據.通過配置SyncManager寄存器來分配內存現數據的周期和非周期性數據的傳輸[4].
從站應用程序控制器通過中斷或查詢的方式存取從站控制器里的數據,執行具體的應用程序,以中斷方式為例,其程序流程圖如圖7所示.同時從站應用程序控制器維護EtherCAT狀態機,實現EtherCAT間的狀態同步與切換.從站應用程序控制器可以是單片機或DSP等微控制器實現,通過串行或并行口和從站控制器相連接[7].
4 網絡性能測試
本系統通過實驗板成功的構建EtherCAT從站設備,并在系統調試完成后進行性能測試.在主站側,通過TwinCAT PLC進行編程,令測試系統的函數為
其中,P為位置偏移量;A為正弦幅值;Δt為離散時間間隔;n為從0到T之間變化的整數.在系統的運行過程中,利用TwinCAT PLC提供的信號跟蹤軟件進行反饋信號的跟蹤來測試網絡傳輸的性能,圖8為周期T=1 s和T=2 s時任意時刻所抓取的給定和反饋位置曲線圖.
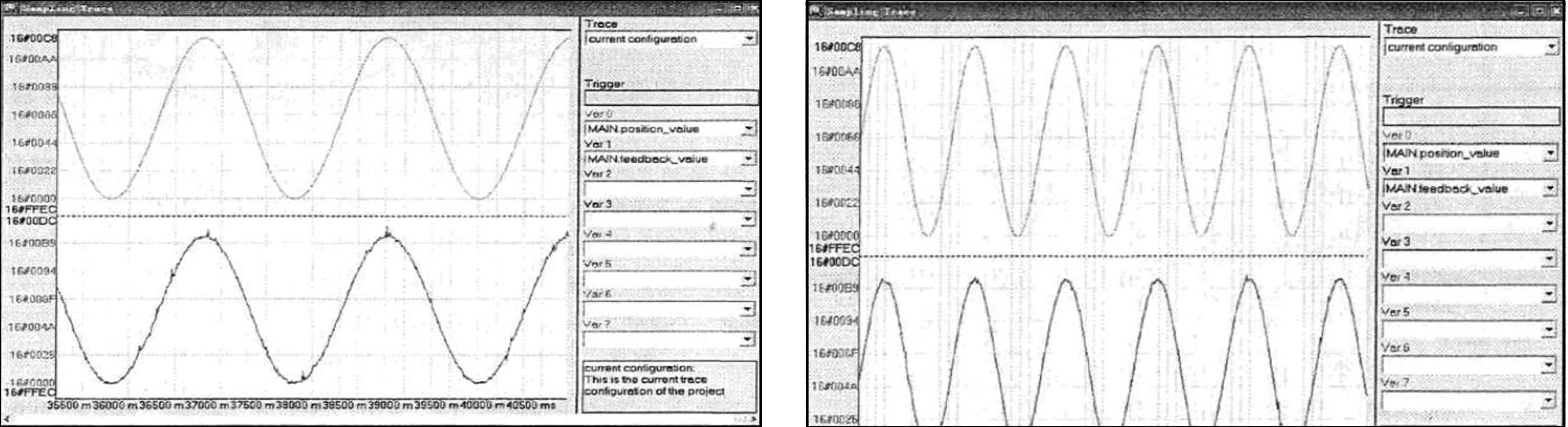
(a) T=1 s (b) T=2 s圖8 給定和反饋位置曲線圖
由圖8可以看到網絡性能測試中反饋數據曲線的平滑性,從而可以得出EtherCAT網絡數據傳輸的穩定性,整個網絡運行狀態良好,網絡延遲小,可靠性高,從而驗證了本設計的可行性.
5 結語
本文利用倍福公司的從站控制芯片ET1100, 提出了一種設計EtherCAT工業以太網總線從站節點的方法,介紹了一種新的工業以太網技術EtherCAT.該網絡擁有杰出的通信性能,接線簡單,協議開放性好,I/O響應速度快,系統軟硬件集成度高.本文設計的從站方案可以單獨作為從站使用,也可以融合到嵌入式系統之中.通過使用基于ET1100的實時工業以太網技術,可以大大提高系統總線的性能,為改善系統控制算法性能也提供了條件.
參考文獻:
[1] 單春榮, 劉艷強, 郇 極. 工業以太網現場總線EtherCAT及驅動程序設計[J]. 制造業自動化, 2007, 29(11): 79-82.
[2] 向乾亮, 辛志遠, 林繼如, 等. 實時以太網EtherCAT 技術在電力系統中的應用[J]. 繼電器, 2008, 36(11): 42-45.
[3] 謝香林,李木國. EtherCAT網絡及其伺服運動控制系統研究[D]. 大連:大連理工大學,2008:47-53.
[4] 劉艷強,王 健,單春榮.基于EtherCAT的多軸運動控制器研究[J].制造技術與機床,2008(6):100-103.
[5] 德國倍福公司.實時以態網:I/O層超高速以態網[J].自動化博覽,2004,21(4):48-50.
[6] EtherCAT teachnical introduction and overview[R]. Germany:EtherCAT Technology Group, 2007.
[7] 郇 極,劉艷強.工業以態網現場總線EtherCAT驅動程序設計及應用[M].北京:北京航天大學出版社,2010.
