自適應振動篩自學習機理研究
2011-12-11 01:55:38朱曉梅田昌文裴廣領裴彩霞
石油礦場機械 2011年12期
關鍵詞:信號
朱曉梅,洪 黎,田昌文,裴廣領,裴彩霞
(河南石油勘探局a.鉆井工程公司;b.機動處,河南南陽473132) ①
自適應振動篩自學習機理研究
朱曉梅a,洪 黎b,田昌文a,裴廣領a,裴彩霞a
(河南石油勘探局a.鉆井工程公司;b.機動處,河南南陽473132)①
為更好地提高振動篩適應外界工況變化的能力,將自適應控制理論應用到振動篩動態性能參數的調整中。研究了振動篩的自學習、自適應過程,對參數估計、自適應控制器設計和自學習控制閉環進行監測。詳述帶有監測與協調級的自學習、自適應振動篩,全面提升振動篩性能,以推動一種新型振動篩的誕生。
自適應振動篩;監測與協調;閉環控制;自學習機理
鉆井液振動篩的工作環境為露天井場,工作條件惡劣。而作為現代鉆井成套固控設備中必不可少的第1級基本篩分設備——鉆井液振動篩,其工作性能的好壞直接決定了固控系統是否能夠很好地完成任務[1]。目前,對振動篩的研究僅局限于單純地對其進行動態性能參數的檢測和簡單獲得其性能參數,不能很好地滿足振動篩工況的需要[2]。將自適應、自學習控制這一概念引入到振動篩的動態性能參數的調整中,能較好地適應外界工況的變化。
1 自適應振動篩自學習理論
由于振動篩的工況相當復雜,動態性能參數比較多,很難預先給振動篩自學習控制系統確定1個固定的診斷標準和動態性能參數標準值[3],最簡單而且可靠的辦法就是與它在正常時的狀態作比較;振動篩正常時的工作狀態無“跑漿”、“篩堵”等異常現象的發生,且篩分效果好。一旦確定振動篩的正常工作狀態,自適應振動篩控制系統也就獲得了振
采用頻域診斷法時建立“標準譜”的過程如下[4]:
在自適應振動篩控制系統正常工作的情況下,不斷采集診斷信號并計算功率譜,這樣經過一段時間就會得到大量的功率譜數據Si(k),i=1,2,…,l,其中i表示第i段信號。由此便可以計算出各個譜線的均值)和方差σ(k),即
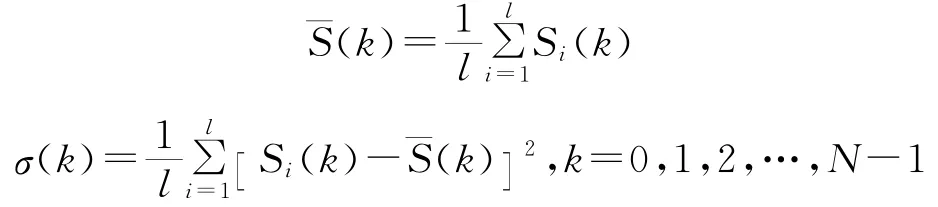
這樣對每條譜線都能建立起近似的標準值Silimit(k),即

照此建立置信區間,高斯分布的置信度可達99.73%。這些標準值被存到計算機,自適應振動篩控制系統完成了自學習、自適應過程,計算機就可以進入監視狀態;如果發現某條譜線超出標準值,即Si(k)≥Silimit(k),則報警并對信號作進一步分析處理,以完成各種規定的診斷及判決。
2 自適應振動篩監測與協調技術
自學習是自適應振動篩控制系統中的核心。為了成功應用模型參數自適應振動篩控制器,要求所有用來推導振動篩參數估計和自適應振動篩控制器設計的假設全部得到滿足,同時設計振動篩參數應選擇正確。但在實際自適應振動篩控制過程中,這些條件會由于某種原因而不能得到滿足,這樣,參數自適應振動篩控制器的性能就會下降甚至不能接受[5]。因此,有必要對參數自適應振動篩控制系統的自學習功能進行連續的監測與協調。
2.1 對參數估計進行監測
對自適應振動篩控制器進行參數估計的主要目的是保證辨識模型與真實模型的輸入-輸出行為匹配得足夠好。在振動篩參數估計的監測與協調過程中除了進行模型驗證,還要進行別的處理,例如:適時關閉參數估計;對估計值濾波;重新啟動參數估計和改變估計參數等。
按照振動篩動態性能參數估計法,可用下述量化標準評價估計算法[6-8]。
1) 振動篩性能參數信號值:①先驗誤差e(k);②e(k)的平均值;③e(k)的方差;④自相關函數中Φee(k);⑤互相關函數中Φue(k);⑥估計過程的損失函數V(k)。
2) 振動篩性能參數值:①估計振動篩參數的平均值;②估計振動篩參數的方差;③協方差矩陣P(k);④信息矩陣H(k)=P-1(k);⑤估計過程的特征值Zi=1-ψT(k)γ(k)(i=1,2,…,n)。
通過上述各值的組合搭配可以監測估計器的錯誤,并對其原因進行歸類,然后采取適當的措施改進振動篩參數估計。
振動篩參數估計的過程特性快速變化、強非線性過程工作點的快速改變都會給過程模型辨識造成困難。在監測與協調級,可以監測先驗誤差e(k)、方差σ2e(k)、損失函數V(k)。如果相應值超出了一定的界限,則減小遺忘因子,使相應值回到允許范圍。對于過程特性變化速度非常快、幅度非常大的情況,可以減小遺忘因子,增大先驗誤差,以此使自適應振動篩控制器緩慢接受振動篩參數估計值。同時,將協方差陣做相應改動可以加快收斂過程。疊加在過程輸出上的外部擾動(例如:階躍變化、信號漂移、沖激信號)對振動篩參數估計過程的假設條件是一種破壞,它使振動篩參數估計值產生與過程動力學無關的劇烈變化,從而使自適應振動篩控制器的控制性能惡化。對于特征頻率在過程帶寬之內的周期干擾信號,情況類似。
由于擾動的作用,振動篩參數估計值會發生階躍變化,經過幾個采樣周期后(與遺忘因子有關)恢復原值。不穩定的及周期的擾動體現在振動篩參數估計值的變化和先驗誤差e(k)、方差σ2e(k)及矩陣P的軌跡上[6]。經過一段時間,這些參數會恢復原狀。在此過程中,自適應振動篩控制器不應發出控制動作。另一種更好的方法是在擾動影響到振動篩參數之前就對振動篩參數估計過程進行干預,即在把過程輸出的振動篩測量值用于振動篩參數估計前,用信號衰減分析法對其進行評價。用這種方法可以在幾個采樣周期內識別出階躍變化、信號漂移、沖激信號和周期性擾動信號。當發現與以往信號不相符的輸出時,關閉振動篩參數估計和靜態量估計。待對擾動進行分類后,按照給定控制方案,再打開振動篩參數估計和靜態量估計功能。對于自適應振動篩的控制環中參考信號的強制改變,不進行監測與協調。
當參數自適應振動篩控制環受到不確定的影響時,振動篩參數估計可能會失敗,對于復雜系統尤其是這樣(過程模型無法逼真近似)。
振動篩參數估計發生錯誤時,衰減信號的均值及方差都會單調增加,矩陣P的軌跡將不會單調減小。此時建議重新啟動振動篩參數估計法,但這會造成自適應振動篩控制器的控制效果暫時惡化。如果不允許這種暫時的惡化,可以減小遺忘因子,同時在過程輸人信號中疊加適當的激勵測試信號。
2.2 對自適應控制器進行監測
除了振動篩參數估計監測外,對自適應振動篩控制器設計也應監測。用監測與協調級指導控制器的計算,可以提高參數自適應振動篩控制環的安全性,降低計算復雜度,減少參數快速頻繁變化對自適應控制器的影響。為避免使用自適應控制器時不符合假設條件(或該條件被破壞),可以對這些假設條件進行檢查,如果出現過程結構和自適應控制器結構不匹配,過程極點消失,過程零點接近或跑出單位圓[7]。在監測與協調級中對于自適應控制器和振動篩參數估計器可以使用不同的采樣時間。
在泥漿過程參數變化不大時,可以跟蹤振動篩參數估計值的時變均值并計算其方差。這時,若遺忘因子λ<1,遞推振動篩估計器能夠跟蹤泥漿過程參數的變化,從而可以計算自適應控制器參數,實現振動篩自適應功能。但是對于泥漿過程參數的大變化,遞推振動篩估計器就不能快速靈敏地跟蹤了。在這種情況下,自適應振動篩控制器參數的計算暫停一段時間,在線控制使用上一組控制參數。暫態變化過程結束后,過程參數估計進人一個新的穩態(如圖1所示,圖中a1為初始傾角;^aF1為經過濾波的特性;^a1為未經過濾波的特性),此時重新開始控制器的參數計算。
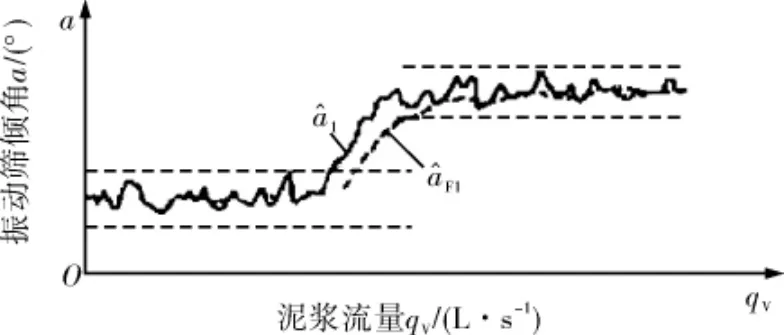
圖1 監測控制器參數估計過程的特性
2.3 對自適應振動篩自學習控制閉環的監測
對于閉環,特別是振動篩參數自適應控制閉環的監測,必須分析從井底返回地面的泥漿控制量和振動篩被控信號[8]。如果在自適應振動篩閉環控制過程中泥漿控制量處于允許范圍的上界或下界,并且對于恒定參考信號控制偏差e(k)=w(k)-y(k)單調增加或振蕩,那么系統應切換至預辨識階段設計的后備自適應控制器。
3 帶有監測與協調級的自學習 自適應振動篩
監測和必要的協調可以用3個反饋環來實現(如圖2),具備發現錯誤、診斷錯誤、啟動補救方法、監測振動篩參數估計和自適應振動篩控制器設計過程。當發現算法錯誤時,采取措施避免控制性能的進一步惡化;監測閉環穩定性,當參數自適應振動篩控制器失穩時采取措施;啟動過程的協調機制,當一套新的自適應振動篩控制器參數投人使用前進行決策;對估計出的過程振動篩參數進行濾波;對參數自適應振動篩控制性能進行一般性改善,例如修改采樣時間等9項功能[9]。監測和協調級的作用是識別、減少和消除振動篩參數估計過程及自適應振動篩控制器設計過程或閉環行為可能造成的缺陷。
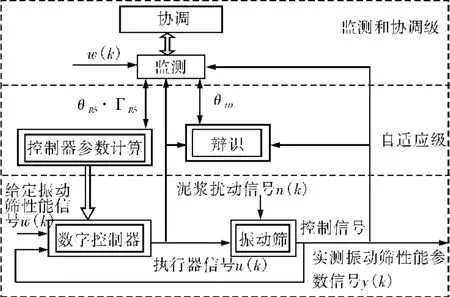
圖2 帶有監測與協調級的自適應振動篩自學習控制環
自適應振動篩自學習控制環在指定了自由參數,對振動篩參數估計器和自適應振動篩控制器設計設定了初始條件后,可對閉環進行啟動。在預辨識階段,為了估計過程模型參數并獲得1個開環下的良好初始模型,可用1個足夠強的信號對過程進行擾動。經過一段足夠長的辨識時間,通過檢查辨識出來的模型與真實過程的輸入-輸出關系,驗證估計的過程模型。在啟動1個參數自適應振動篩控制環之前,可以為過程辨識模型和用于預辨識的工作點計算1個后備控制器[10]。當參數自適應控制環失穩時,可以切換到后備控制器,操縱系統到達穩定的工作點。
與基本參數自適應自學習控制器相比,帶有監測與協調級的參數自適應控制器對性能和穩定性有極大的改善。對1個線性3階低通過程(其輸出受到隨機泥漿變量信號n(k)的干擾)使用DB控制器:在A段,過程參數和參考信號發生了變化;在B段,過程增益發生了變化;在C段,為了進行參數估計,在過程輸出信號上疊加了一個外部信號[11-13]。
如圖3~4所示,對于基本參數自適應振動篩控制器,在A段,振動篩參數估計值和自適應振動篩控制器參數變化很大,以至控制信號u(k)與過程輸出y(k)變化很大;在B段,過程增益的較大變化引起了不帶監測與協調級的參數自適應控制器控制性能的惡化;在C段,過程輸出信號上疊加外部測試信號引起了控制的不穩定,而帶有監測與協調級的參數自適應控制器在處理擾動方面具有優勢。
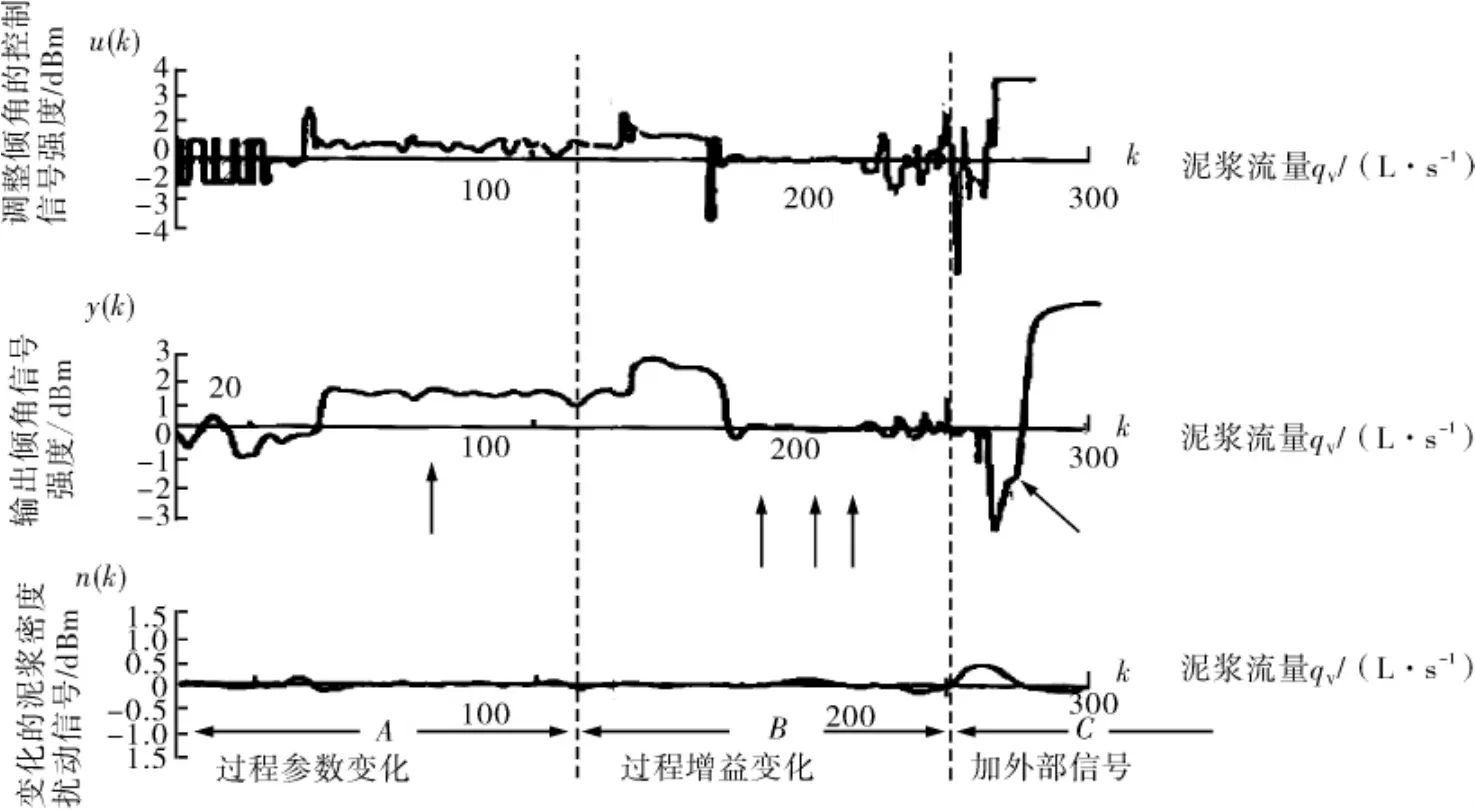
圖3 不帶有監測與協調級的參數自適應振動篩控制過程
圖4 帶有監測與協調級的參數自適應振動篩控制過程
4 結語
自適應振動篩是一種帶有監測與協調級的全新型振動篩,具備自學習、自適應功能。應用現代靜、動態測控技術監測參數,可獲取振動篩動態性能優化參數,全面提升產品性能,實現振動篩整機及零部件的自學習、自適應,提高篩分效果和振動篩的處理量,以推動鉆井泥漿固控技術發展。
[1] 王宏偉,劉 軍,劉繼亮.國外新型鉆井振動篩研究進展[J].石油礦場機械,2011,40(3):72-76.
[2] 徐 倩,鄧 嶸,李艷萍,等.2種新型鉆井振動篩[J].石油礦場機械,2010,39(8):53-56.
[3] 朱維兵,張明洪.鉆井液振動篩的應用與發展水平[J].鉆采工藝,1999,22(2):12-15.
[4] 張明洪,張萬福,龔偉安,等.振動篩研制中的動態測試[J].石油礦場機械,1989,18(6):14-22.
[5] 茹 軍,張明洪.鉆井液振動篩整機動態檢測中的若干問題[J].石油礦場機械,2003,32(3):68-70.
[6] 侯勇俊,申永強,田 英,等.基于運動合成原理的三電機自同步橢圓振動篩同步穩定性研究[J].石油礦場機械,2010,39(6):1-5.
[7] 陳世春,張曉東,梁紅軍,等.塔里木地區超深井鉆機配置[J].石油礦場機械,2010,39(4):48-53.
[8] 馬建民,劉永紅,李 夯,等.可自適應膨脹防砂篩管膨脹機理研究[J].石油礦場機械,2009,38(12):9-11.
[9] 任 建,王 剛,周 強,等.井控裝置測控系統改進方法研究[J].石油礦場機械,2010,39(11):63-65.
[10] 秦樹人,張明洪.機械測試原理與技術[M].重慶:重慶大學出版社,2002:25-30.
[11] 張明洪.設備工況監測與故障診斷[D].成都:西南石油學院,2002:39-42.
[12] 宋德玉.可編程序控制器原理及應用系統設計技術[M].北京.冶金工業出版社,2006:43-46.
[13] 張莉松,徐立新.伺服系統原理與設計[M].北京:北京理工大學出版社,2006:5-10.
Self-learning Mechanism Research on Auto-adapted Shale Shaker
ZHU Xiao-meia,HONG Lib,TIAN Chang-wena,PEI Guang-linga,PEI Cai-xiaa
(a.Drilling Engineering Company;b.Mobile Department,Henan Petroleum Exploration Bureau,Nanyang473132,China)
In order to improve the capability of the shale shaker to adapt to the external conditions change,the adaptive control theory is applied to the shaker’s examination of the dynamic property parameter;according to the research on the self-learning and adaptive process of Auto-adapted Shale Shaker,the article monitors the parameter estimation,the design on adaptive controller and self-learning control loop,and details Self-learning adaptive shale shaker with the monitoring and coordination level to comprehensively enhance the shaker’s performance and promote a new vibration sieve will be born.
auto-adapted shale shaker;monitoring and coordination level;control loop;self-learning mechanism
1001-3482(2011)12-0016-05
TE926
A
2011-06-30
朱曉梅(1982-),女,山東臨沂人,工程師,碩士,主要從事石油機械設計理論與方法的研究,E-mail:zjgsjdk@163.com。動篩動態性能參數的標準值。同時,考慮到即使是同一類型的設備,由于制造和安裝誤差的影響,標準值也有一定的分散,這就要求在建立診斷誤差文檔時要根據不同對象通過自學習過程以建立相應的“適值門坎”。另外,即使是同1臺設備,在作為其診斷依據的診斷信號中都含有大量的隨機因素,為使其建立的診斷標準或閥值具有儀器的置信概率,在建立診斷文檔時多采用統計的方法以保證一定的隨機適應能力。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06