中國首次交會(huì)對(duì)接任務(wù)的技術(shù)成就和展望
2011-12-27 08:48:14尚志
航天器工程 2011年6期
尚志
(中國空間技術(shù)研究院,北京 100094)
1 引言
國際載人航天目前正處于轉(zhuǎn)變時(shí)期,縱觀國際載人航天的發(fā)展歷程,我國載人航天工程按照“三步走”的發(fā)展戰(zhàn)略進(jìn)行實(shí)施。第一步為“以載人飛船起步,發(fā)射幾艘無人試驗(yàn)飛船和一艘有人飛船”解決天地往返的運(yùn)輸工具問題;第二步為“研制和發(fā)射空間實(shí)驗(yàn)室,盡早建成完整配套的空間站工程大系統(tǒng),實(shí)現(xiàn)一定規(guī)模的空間應(yīng)用”;第三步為“建造長期有人照料的大型空間站”。本著“自主創(chuàng)新、重點(diǎn)跨越、支持發(fā)展、引領(lǐng)未來”的指導(dǎo)思想,認(rèn)真總結(jié)國際載人航天發(fā)展的經(jīng)驗(yàn),結(jié)合我國政治、經(jīng)濟(jì)、國防及科學(xué)技術(shù)等各個(gè)方面對(duì)載人航天長遠(yuǎn)任務(wù)需求,順應(yīng)世界載人航天發(fā)展的趨勢(shì),探索出一條符合我國國情、目標(biāo)長遠(yuǎn)、可持續(xù)發(fā)展的道路。
2004年12月中央批準(zhǔn)啟動(dòng)我國載人航天第二步任務(wù),并明確第二步任務(wù)重點(diǎn)放在載人航天器交會(huì)對(duì)接和航天員空間活動(dòng)等重大技術(shù)突破上。神舟七號(hào)飛船出艙活動(dòng)已經(jīng)突破和基本掌握了航天員空間活動(dòng)技術(shù)。天宮一號(hào)目標(biāo)飛行器將分別與神舟八號(hào)、神舟九號(hào)和神舟十號(hào)3艘載人飛船執(zhí)行無人或載人交會(huì)對(duì)接任務(wù),以突破航天器交會(huì)對(duì)接技術(shù)。
2011年11月,神舟八號(hào)載人飛船和天宮一號(hào)目標(biāo)飛行器完成了交會(huì)對(duì)接、組合體飛行并分離后安全返回地面,標(biāo)志著我國首次交會(huì)對(duì)接任務(wù)圓滿完成。
本文系統(tǒng)介紹了天宮一號(hào)目標(biāo)飛行器和神舟八號(hào)載人飛船的研制歷程、主要技術(shù)成就、與國外技術(shù)的比較、任務(wù)意義和后續(xù)發(fā)展展望。
2 主要研制歷程及交會(huì)對(duì)接任務(wù)過程概況
天宮一號(hào)目標(biāo)飛行器和神舟八號(hào)載人飛船的研制歷時(shí)6年多時(shí)間,先后經(jīng)歷了方案設(shè)計(jì)、初樣研制和正樣研制階段,完成了規(guī)定的700余項(xiàng)試驗(yàn)。
2.1 主要研制歷程
以下分別介紹天宮一號(hào)目標(biāo)飛行器和神舟八號(hào)載人飛船的主要研制歷程。
1)天宮一號(hào)目標(biāo)飛行器主要研制歷程
2006年12月,完成了方案設(shè)計(jì),轉(zhuǎn)入初樣研制階段;
2009年5月,完成了初樣結(jié)構(gòu)/熱控器的總裝和大型試驗(yàn);
2009年7月,完成了初樣電性器總裝、電性能測(cè)試、電磁兼容性(EMC)測(cè)試和磁試驗(yàn);
2009年12月,完成了初樣研制,轉(zhuǎn)入正樣研制階段;
2011年5月,完成了正樣器總裝、電測(cè)、大型試驗(yàn)、軟件落焊及回歸測(cè)試;
2011年6月,通過了正樣出廠評(píng)審;
2011年9月,完成了發(fā)射場(chǎng)任務(wù),由長征-2F火箭運(yùn)載升空;
2011年10月,完成了在軌測(cè)試;
2011年11月,完成了降軌調(diào)相、轉(zhuǎn)倒飛以及交會(huì)對(duì)接前設(shè)置,在343km 高度軌道等候交會(huì)對(duì)接。
2)神舟八號(hào)載人飛船主要研制歷程
2006年12月,完成了方案設(shè)計(jì),轉(zhuǎn)入初樣研制階段;
2008年12月,完成了初樣結(jié)構(gòu)/熱控船的總裝和大型試驗(yàn);
2009年9月,完成了初樣電性船總裝、電性能測(cè)試、EMC測(cè)試和磁試驗(yàn);
2010年4月,完成了初樣研制,轉(zhuǎn)入正樣研制階段;
2011年6月,完成了正樣船總裝、電測(cè)、大型試驗(yàn)、軟件落焊及回歸測(cè)試;
2011年8月,通過了正樣出廠評(píng)審;
2011年11月,完成了發(fā)射場(chǎng)任務(wù),由長征-2F火箭運(yùn)載升空,變軌后進(jìn)入343km 高度軌道。
2.2 交會(huì)對(duì)接任務(wù)過程概況
神舟八號(hào)載人飛船與天宮一號(hào)目標(biāo)飛行器的空間交會(huì)對(duì)接任務(wù)飛行過程需經(jīng)歷5個(gè)階段:(1)遠(yuǎn)距離導(dǎo)引段,兩航天器都入軌后,通過地面測(cè)控站的引導(dǎo),建立穩(wěn)定的通信鏈路,自主導(dǎo)航;(2)自主控制段,經(jīng)過尋的、接近和平移靠攏3個(gè)過程,神舟八號(hào)載人飛船自主導(dǎo)航至與天宮一號(hào)目標(biāo)飛行器接觸;(3)對(duì)接段,從對(duì)接機(jī)構(gòu)接觸開始,完成捕獲、緩沖、拉近和鎖緊4個(gè)過程,最終實(shí)現(xiàn)兩航天器剛性連接,形成組合體;(4)組合體飛行段,由天宮一號(hào)目標(biāo)飛行器負(fù)責(zé)組合體飛行控制,神舟八號(hào)載人飛船處于停靠狀態(tài),擇機(jī)進(jìn)行并完成第二次交會(huì)對(duì)接試驗(yàn);(5)分離撤離段,兩航天器再次分離,神舟八號(hào)載人飛船撤離到安全距離,交會(huì)對(duì)接試驗(yàn)完成。
整個(gè)交會(huì)對(duì)接過程需保證接合平穩(wěn),避免因劇烈搖晃而影響兩在軌航天器的姿態(tài)。
3 我國首次交會(huì)對(duì)接任務(wù)取得的主要技術(shù)成就
我國自20世紀(jì)90年代,開始進(jìn)行載人航天器空間段設(shè)計(jì)技術(shù)的論證,并對(duì)交會(huì)對(duì)接總體技術(shù)和關(guān)鍵技術(shù)進(jìn)行攻關(guān),先后完成了飛船與目標(biāo)飛行器交會(huì)對(duì)接方案設(shè)計(jì)、飛船和目標(biāo)飛行器構(gòu)成的載人航天器空間段系統(tǒng)的交會(huì)對(duì)接飛行方案設(shè)計(jì),并攻克了空間交會(huì)對(duì)接技術(shù)、組合體控制與管理技術(shù)、低軌長壽命載人航天器設(shè)計(jì)技術(shù)和載人航天器組批研制技術(shù)。
3.1 載人航天器空間段設(shè)計(jì)技術(shù)
交會(huì)對(duì)接飛行任務(wù)需要天宮一號(hào)目標(biāo)飛行器和神舟八號(hào)、神舟九號(hào)、神舟十號(hào)載人飛船通過4次發(fā)射在軌組合飛行來完成,這也是區(qū)別于以往載人航天飛行任務(wù)和衛(wèi)星飛行任務(wù)的重要方面,需要從載人航天器空間段層面來開展設(shè)計(jì)。
載人航天器空間段設(shè)計(jì),負(fù)責(zé)組織分析工程總體下達(dá)的交會(huì)對(duì)接任務(wù)的技術(shù)要求;“空間段”飛行任務(wù)分析和方案設(shè)計(jì);研究目標(biāo)飛行器和載人飛船間聯(lián)合飛行或運(yùn)營管理技術(shù);協(xié)調(diào)兩航天器指標(biāo)和接口;確定聯(lián)合試驗(yàn)、仿真和測(cè)試項(xiàng)目。
3.2 空間交會(huì)對(duì)接技術(shù)
目標(biāo)飛行器在飛船發(fā)射前1天進(jìn)入交會(huì)對(duì)接軌道,等待飛船進(jìn)行交會(huì)對(duì)接;在飛船入軌后,由飛船完成遠(yuǎn)程導(dǎo)引控制;飛船和目標(biāo)飛行器相對(duì)距離小于100km 后,利用空空通信和交會(huì)測(cè)量設(shè)備進(jìn)行自主控制實(shí)現(xiàn)船器空間交會(huì),最后通過兩航天器前端配置的主被動(dòng)對(duì)接機(jī)構(gòu)完成對(duì)接。
1)遠(yuǎn)距離導(dǎo)引技術(shù)[1]
載人飛船的遠(yuǎn)距離導(dǎo)引段從收到“船箭分離”信號(hào)起,至轉(zhuǎn)入自主控制點(diǎn)止,通過軌道機(jī)動(dòng)提高飛船軌道高度,調(diào)整兩航天器的相位差,縮短相對(duì)距離;同時(shí)消除入軌誤差造成的兩航天器軌道面偏差,最終使載人飛船軌道終端條件滿足轉(zhuǎn)入自主控制的條件。
2)兩航天器間的相對(duì)測(cè)量與通信技術(shù)
載人飛船配置了多種交會(huì)測(cè)量設(shè)備,用于交會(huì)自主控制過程的相對(duì)測(cè)量。包括微波雷達(dá)、激光雷達(dá)、CCD 光學(xué)成像敏感器和電視攝像機(jī)。
載人飛船與目標(biāo)航天器交會(huì)對(duì)接和組合體飛行中,有空空通信無線信息傳輸和對(duì)接總線有線信息傳輸兩條鏈路,分別用于兩航天器對(duì)接前后信息通信。
3)兩航天器對(duì)接與分離技術(shù)
載人飛船與目標(biāo)飛行器采用導(dǎo)向板內(nèi)翻的異體同構(gòu)周邊式對(duì)接機(jī)構(gòu),載人飛船為主動(dòng)端,目標(biāo)飛行器為被動(dòng)端,兩對(duì)接機(jī)構(gòu)共同實(shí)現(xiàn)兩航天器的捕獲、緩沖、鎖緊、連接以及解鎖、分離。兩航天器對(duì)接鎖的主、被動(dòng)鎖鉤上均安裝爆炸螺栓,在緊急情況下,可引爆對(duì)接鎖上的火工品實(shí)現(xiàn)兩航天器分離。
3.3 組合體管理技術(shù)
組合體是從“目標(biāo)飛行器與載人飛船完成剛性對(duì)接、目標(biāo)飛行器控制組合體姿態(tài)啟控”至“組合體分離開始、目標(biāo)飛行器控制組合體停控”的船器組合體。組合體飛行期間,以目標(biāo)飛行器為主進(jìn)行組合體的控制與管理,飛船處于停靠狀態(tài),共同實(shí)現(xiàn)組合體載人環(huán)境控制、姿態(tài)與軌道控制的功能。
1)大質(zhì)量、大慣量、大柔性、變結(jié)構(gòu)姿控技術(shù)
為解決組合體模態(tài)密集、且在大型轉(zhuǎn)動(dòng)撓性外伸結(jié)構(gòu)引起的動(dòng)力學(xué)耦合情況下保持姿態(tài)穩(wěn)定的難題,目標(biāo)飛行器設(shè)計(jì)單框架控制力矩陀螺進(jìn)行姿態(tài)控制,使用磁力矩器完成對(duì)控制力矩陀螺系統(tǒng)卸載,滿足組合體姿態(tài)控制要求,同時(shí)為空間站組合體姿態(tài)控制方案進(jìn)行在軌驗(yàn)證。
2)熱負(fù)荷動(dòng)態(tài)變化的組合體載人環(huán)境控制技術(shù)
天宮一號(hào)的載人環(huán)境控制設(shè)計(jì)需滿足自主運(yùn)行、1人飛行、2人飛行和3人飛行等工況,各工況的密封艙內(nèi)熱負(fù)荷動(dòng)態(tài)變化大。目標(biāo)飛行器采用通風(fēng)換熱為主、被動(dòng)熱控為輔的環(huán)熱控一體化設(shè)計(jì),通過調(diào)節(jié)輻射器混合出口溫度,實(shí)現(xiàn)外回路換熱能力調(diào)節(jié),滿足密封艙溫濕度的要求。
3.4 低軌長壽命載人航天器設(shè)計(jì)技術(shù)
天宮一號(hào)目標(biāo)飛行器是我國首個(gè)在軌運(yùn)行時(shí)間為2年的低軌長壽命載人航天器,飛行期間運(yùn)行在340~400km 的近圓軌道,需經(jīng)受太陽輻射、高層大氣、地球磁場(chǎng)、失重、真空、高能帶電粒子、電離層、微流星體及空間碎片等低軌空間環(huán)境。天宮一號(hào)開展的低軌長壽命載人航天器設(shè)計(jì)與驗(yàn)證主要包括:
(1)對(duì)艙外材料/涂層、太陽電池翼、對(duì)接鎖系等性能參數(shù)受原子氧、紫外線或真空等低軌環(huán)境影響,對(duì)性能參數(shù)逐步退化的產(chǎn)品進(jìn)行可靠性及壽命試驗(yàn),驗(yàn)證對(duì)低軌環(huán)境的適應(yīng)能力;
(2)對(duì)影響目標(biāo)飛行器控制、環(huán)控?zé)峥亍y(cè)控、能源關(guān)鍵功能的機(jī)電產(chǎn)品從軸承設(shè)計(jì)、潤滑設(shè)計(jì)等開展長壽命設(shè)計(jì),安排專項(xiàng)壽命試驗(yàn)進(jìn)行驗(yàn)證,同時(shí)從系統(tǒng)設(shè)計(jì)層面提高風(fēng)機(jī)、泵、陀螺等產(chǎn)品的冗余度,采用冷備份設(shè)計(jì)提高平臺(tái)壽命;
(3)對(duì)電子設(shè)備注重芯片選型,采用雙機(jī)冷備份的設(shè)計(jì)方式保證整機(jī)性能不受低軌環(huán)境影響,采用加速壽命試驗(yàn)驗(yàn)證是否滿足壽命要求。
3.5 載人航天器組批研制體系
為適應(yīng)交會(huì)對(duì)接任務(wù)小批量、發(fā)射密集程度高的特點(diǎn),建立載人航天器組批研制、生產(chǎn)與測(cè)試的體系。
(1)通過梳理和確定適應(yīng)批量化生產(chǎn)要求的載人航天器研制計(jì)劃流程和技術(shù)流程,培育并掌握批量化生產(chǎn)的總裝工藝、測(cè)試和試驗(yàn)等技術(shù),固化技術(shù)狀態(tài)、接口關(guān)系,建立適應(yīng)批量化生產(chǎn)要求的技術(shù)體系;
(2)通過規(guī)劃、調(diào)整、補(bǔ)充建設(shè)適應(yīng)載人航天器總體生產(chǎn)能力的批量化柔性生產(chǎn)線,形成滿足發(fā)展要求的批量化生產(chǎn)保障能力;
(3)通過對(duì)現(xiàn)有管理模式的調(diào)整,建立適應(yīng)批量化生產(chǎn)要求,涵蓋計(jì)劃、質(zhì)量、成本、物資、人力資源、信息溝通以及風(fēng)險(xiǎn)控制等要素的管理體系,形成適應(yīng)批量化生產(chǎn)要求的管理模式,提升科學(xué)管理能力。
4 國內(nèi)外交會(huì)對(duì)接技術(shù)比較[2-6]
1961年4月12日蘇聯(lián)航天員加加林乘東方1號(hào)載人飛船上天,標(biāo)志著載人航天時(shí)代的開始。回顧50多年來的發(fā)展歷程,美國走過的載人航天路線是:由載人飛船到航天飛機(jī)再到空間站;俄羅斯走過的載人航天路線是:由載人飛船到空間站再到航天飛機(jī)。除美國阿波羅號(hào)飛船登月外,美俄兩國涉足的載人航天活動(dòng)領(lǐng)域基本相當(dāng),以互相競(jìng)賽式的模式發(fā)展為主。目前,共有蘇聯(lián)/俄羅斯、美國、歐洲、日本和中國等國家和組織成功實(shí)施了空間交會(huì)對(duì)接,各國的交會(huì)對(duì)接技術(shù)比較見表1。
其中,人控交會(huì)對(duì)接和自動(dòng)交會(huì)對(duì)接的優(yōu)缺點(diǎn)對(duì)比如下。
(1)人工控制的優(yōu)點(diǎn):可充分發(fā)揮人的智能優(yōu)勢(shì),提高交會(huì)對(duì)接成功的概率,能對(duì)對(duì)接過程中的故障進(jìn)行處置或維修;缺點(diǎn):航天員的操作負(fù)荷大,受空間環(huán)境條件(光照)限制。
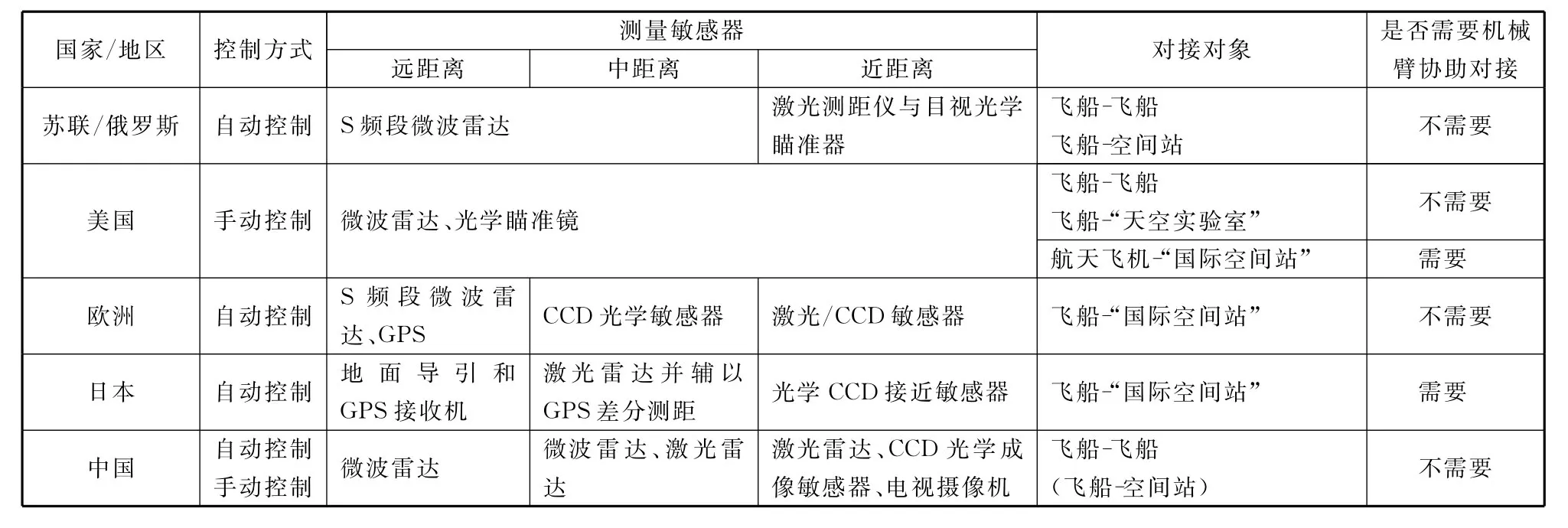
表1 各國的交會(huì)對(duì)接技術(shù)比較Table1 Comparison of rendezvous and docking technology of different countries
(2)自動(dòng)控制的優(yōu)點(diǎn):只依賴自控設(shè)備,系統(tǒng)可靠性高,對(duì)環(huán)境適應(yīng)性好;缺點(diǎn):作為安全性措施,需要分布很廣的地面站或中繼衛(wèi)星支持。
從上述分析可知,雖然我國交會(huì)對(duì)接技術(shù)發(fā)展較晚,但總體水平和航天發(fā)達(dá)國家相當(dāng)。我國采取自動(dòng)控制和手動(dòng)控制相結(jié)合的方案,充分發(fā)揮了人控交會(huì)對(duì)接和自動(dòng)交會(huì)對(duì)接的特點(diǎn),比較好地兼顧了系統(tǒng)可靠性和安全性[7]。
5 我國首次交會(huì)對(duì)接任務(wù)的意義及展望
2011年11月17日,我國首次空間交會(huì)對(duì)接任務(wù)取得圓滿成功,其具有的工程、科學(xué)及社會(huì)意義深遠(yuǎn)。
1)提升國家威望,產(chǎn)生廣泛社會(huì)效益
強(qiáng)大政治影響力需要強(qiáng)大的綜合國力作后盾,而載人航天,就是衡量國家綜合國力的重要標(biāo)志之一。如果沒有高度發(fā)達(dá)的科學(xué)技術(shù)和科研能力,如果沒有雄厚的經(jīng)濟(jì)基礎(chǔ),任何一個(gè)國家都是不可能開展載人航天工程的。
通過首次航天器交會(huì)對(duì)接任務(wù),大大提高了我國的國際地位和國際威望,增強(qiáng)了政治影響力、民族自信心和自豪感,也增強(qiáng)了國家的戰(zhàn)略威懾力量。同時(shí)廣泛鼓舞了青少年的科學(xué)熱情,為我國航天科技發(fā)展吸引了新生力量。
2)帶動(dòng)基礎(chǔ)學(xué)科發(fā)展
完成首次交會(huì)對(duì)接任務(wù)的兩個(gè)載人航天器——載人飛船與目標(biāo)飛行器,分別具有可返回、在軌時(shí)間長的特點(diǎn)。根據(jù)其特點(diǎn),可搭載空間站技術(shù)試驗(yàn)、空間科學(xué)試驗(yàn)、空間應(yīng)用試驗(yàn)和航天醫(yī)學(xué)試驗(yàn)項(xiàng)目。
后續(xù)載人航天工程任務(wù)必然會(huì)牽引更多的科學(xué)實(shí)驗(yàn)項(xiàng)目,帶動(dòng)相應(yīng)基礎(chǔ)學(xué)科的發(fā)展。3)推動(dòng)航天技術(shù)持續(xù)發(fā)展
研制并發(fā)射目標(biāo)飛行器,既作為目標(biāo)配合突破交會(huì)對(duì)接技術(shù),又可為空間站積累經(jīng)驗(yàn);研制功能完善的載人運(yùn)輸飛船,既可突破交會(huì)對(duì)接技術(shù),又可滿足空間實(shí)驗(yàn)室和中小規(guī)模空間站的乘員組運(yùn)輸服務(wù)需求。
空間實(shí)驗(yàn)室和空間站作為航天領(lǐng)域的重要基礎(chǔ)設(shè)施,將成為我國航天技術(shù)發(fā)展研究和實(shí)驗(yàn)的重要基地。通過開展這些航天高新技術(shù)的實(shí)驗(yàn)研究和驗(yàn)證,將極大地提高我國航天技術(shù)的整體水平。
4)為后續(xù)載人航天任務(wù)奠定堅(jiān)實(shí)基礎(chǔ)
交會(huì)對(duì)接技術(shù)是各國發(fā)展載人航天所必須掌握的關(guān)鍵技術(shù)。首次交會(huì)對(duì)接任務(wù)的成功,表明我國已掌握了這一關(guān)鍵技術(shù),從而可以向更高的目標(biāo)前進(jìn)。
本次交會(huì)對(duì)接任務(wù)的完成,同時(shí)還突破和基本掌握了部分空間站關(guān)鍵技術(shù),如:在軌載人航天器整體壁板結(jié)構(gòu)技術(shù),大質(zhì)量、大慣量、大柔性變結(jié)構(gòu)姿控技術(shù),高電壓大功率低軌長壽命電源技術(shù),組合體管理技術(shù),長期在軌飛行空間碎片防護(hù)技術(shù),長期在軌生命保障核心技術(shù),長期在軌運(yùn)動(dòng)機(jī)構(gòu)技術(shù),金屬膜盒式貯箱技術(shù),高速大容量數(shù)據(jù)處理及傳輸技術(shù)。這些技術(shù)的掌握,將成為我國空間站建設(shè)的有力保障。
載人飛行可以充分發(fā)揮人的能動(dòng)性,開展航天技術(shù)試驗(yàn),利用載人飛行平臺(tái),開展空間綜合應(yīng)用,從而推動(dòng)國家航天技術(shù)和空間應(yīng)用的持續(xù)發(fā)展。
首次交會(huì)對(duì)接任務(wù)的成功實(shí)施,標(biāo)志著我國突破和基本掌握了航天器交會(huì)對(duì)接技術(shù)及其組合體控制技術(shù)。預(yù)計(jì)2012年上半年發(fā)射的神舟九號(hào)載人飛船、2012年下半年發(fā)射的神舟十號(hào)載人飛船,還將與天宮一號(hào)目標(biāo)飛行器執(zhí)行交會(huì)對(duì)接任務(wù),以對(duì)交會(huì)對(duì)接技術(shù)、組合體控制技術(shù)和航天員中短期駐留支持技術(shù)進(jìn)行全面驗(yàn)證。
后續(xù)任務(wù)通過空間實(shí)驗(yàn)室和空間站,開始解決人類長期宇宙飛行技術(shù),符合載人航天發(fā)展規(guī)律,符合國家發(fā)展戰(zhàn)略。主要的發(fā)展前景包括:
(1)突破航天員長期在軌技術(shù),奠定堅(jiān)實(shí)的服務(wù)與發(fā)展基礎(chǔ);
(2)開展空間新技術(shù)試驗(yàn),拓展載人航天領(lǐng)域;
(3)開展載人登月技術(shù)試驗(yàn)探索,開發(fā)宇宙空間資源;
(4)發(fā)展低成本的、可部分重復(fù)使用的、載人行星探測(cè)的新一代大型天地往返運(yùn)輸飛船。
載人航天已作為一個(gè)專項(xiàng)納入國家中長期科學(xué)和技術(shù)發(fā)展規(guī)劃綱要。2010年9月,中央批準(zhǔn)實(shí)施載人空間站工程。我們相信在掌握了航天員出艙活動(dòng)技術(shù)、交會(huì)對(duì)接技術(shù)、組合體控制技術(shù)和航天員駐留支持技術(shù)的基礎(chǔ)上,大力協(xié)同、集智攻關(guān),必將實(shí)現(xiàn)中國的空間實(shí)驗(yàn)室及后期空間站的建設(shè)任務(wù)。
(References)
[1]湯溢,王翔.航天器交會(huì)遠(yuǎn)距離導(dǎo)引段誤差敏感度分析[J].航天器工程,2010,19(3):40-44
Tang Yi,Wang Xiang.Research on error sensitivity of spacecraft rendezvous phase[J].Spacecraft Engineering,2010,19(3):40-44(in Chinese)
[2]林來興.四十年空間交會(huì)對(duì)接技術(shù)的發(fā)展[J].航天器工程,2007,16(4):70-77
Lin Laixing.Development of space rendezvous and docking technology in past 40years[J].Spacecraft Engineering,2007,16(4):70-77(in Chinese)
[3]周建平.載人航天交會(huì)對(duì)接技術(shù)[J].載人航天,2011(2):1-8
Zhou Jianping.Rendezvous and docking technology of human space flight[J].Manned Spaceflight,2011(2):1-8(in Chinese)
[4]Machula M,Sandhoo G.Rendezvous and docking for space exploration[C]//Orlando:1stSpace Exploration Conference:Continuing the Voyage of Discovery.AIAA,2005
[5]Fehse W.Automated rendezvous and docking of spacecraft[M].London:Cambridge University Press,2003
[6]Goodman J.History of space shuttle rendezvous and proximity operation[J].Journal of Spacecraft and Roket,2006,43(5):944-959
[7]胡海霞,解永春.國外航天器人控交會(huì)對(duì)接系統(tǒng)研究及分析[C]//云南昆明:全國第十一屆空間及運(yùn)動(dòng)體控制技術(shù)學(xué)術(shù)會(huì)議.中國自動(dòng)化學(xué)會(huì),2004:187-191
Hu Haixia,Xie Yongchun.Research and analysis of foreign spacecraft manual control rendezvous and docking system[C]//Kunming,Yunnan:The 11thNational Conference on Spacecraft Control.Chinese Institute of Automation,2004:187-191(in Chinese)