電鍍生產(chǎn)線電氣控制系統(tǒng)的研究
2011-12-28 06:55:26夏長鳳
電鍍與環(huán)保 2011年6期
夏長鳳
(南通航運(yùn)職業(yè)技術(shù)學(xué)院機(jī)電研究所,江蘇南通 226010)
電鍍生產(chǎn)線電氣控制系統(tǒng)的研究
夏長鳳
(南通航運(yùn)職業(yè)技術(shù)學(xué)院機(jī)電研究所,江蘇南通 226010)
研究分析了電鍍行業(yè)中鍍銀的工藝要求,提出高效、自動(dòng)化程度高的控制方案。利用三菱Q01系列可編程序控制器、三菱 GT1275新型觸摸屏及變頻器組成綜合監(jiān)控系統(tǒng),實(shí)現(xiàn)了塑料件電鍍各功能控制。該控制系統(tǒng)可靠性高,能適應(yīng)較惡劣的生產(chǎn)環(huán)境,可實(shí)現(xiàn)鍍銀和鍍錫功能的切換。程序采用結(jié)構(gòu)化的設(shè)計(jì)方法,實(shí)現(xiàn)手動(dòng)點(diǎn)動(dòng)、手動(dòng)長動(dòng)尋位及自動(dòng)控制等功能,在自動(dòng)過程中能實(shí)現(xiàn)快捷的手動(dòng)干預(yù)功能。該系統(tǒng)中各行車的運(yùn)行動(dòng)作協(xié)調(diào),并有防撞保護(hù)功能,保證安全性。
電鍍;自動(dòng)控制;結(jié)構(gòu)化程序設(shè)計(jì)
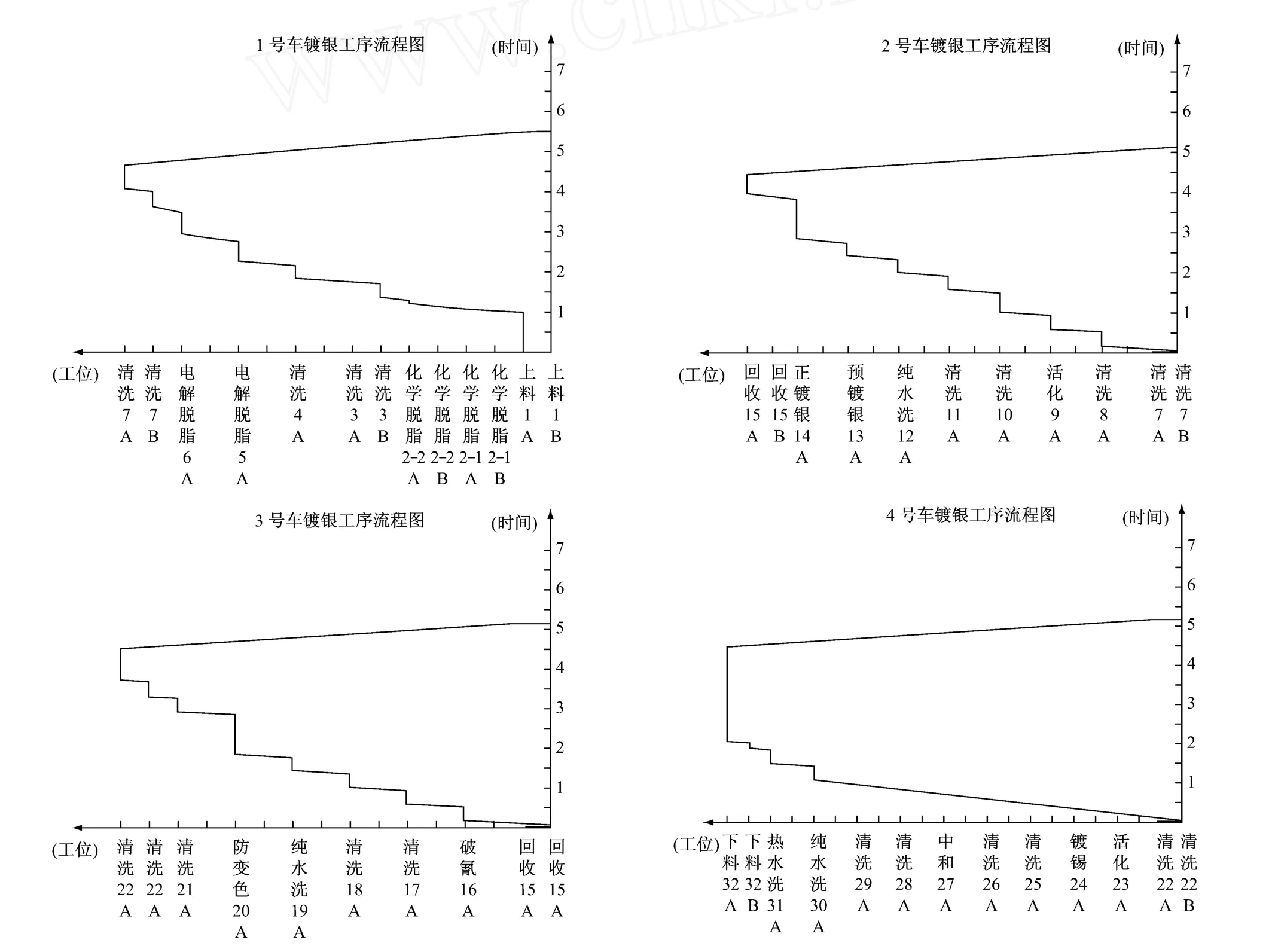
圖1 自動(dòng)線各行車工藝流程示意圖
0 前言
基于本院和江蘇啟東愛爾鍍環(huán)保設(shè)備有限公司合作開發(fā)鍍銀、錫自動(dòng)生產(chǎn)線的基礎(chǔ)上,探討研究電鍍生產(chǎn)線自動(dòng)化控制系統(tǒng)。應(yīng)用PLC技術(shù)及觸摸屏技術(shù)實(shí)現(xiàn)電鍍過程自動(dòng)化和監(jiān)控。同時(shí)采用變頻器實(shí)現(xiàn)快捷調(diào)速,滿足行車的運(yùn)行要求,提高了勞動(dòng)生產(chǎn)率,穩(wěn)定了產(chǎn)品質(zhì)量,修改電鍍工藝,調(diào)整控制系統(tǒng)也很方便。通過觸摸屏對電鍍的時(shí)間、電壓和電流等參數(shù)進(jìn)行調(diào)整,有效地減少廢品率,而且還可以提高生產(chǎn)效率和減輕工人的勞動(dòng)強(qiáng)度,有著非常好的經(jīng)濟(jì)效益和社會效益。該生產(chǎn)線包括鍍銀和鍍錫兩條生產(chǎn)線[1],本文以鍍銀生產(chǎn)線為例進(jìn)行分析,并介紹自動(dòng)控制系統(tǒng)[2-3]。
1 電鍍生產(chǎn)線工藝要求
電鍍生產(chǎn)線上對行車的自動(dòng)化控制是電鍍生產(chǎn)線自動(dòng)化控制的關(guān)鍵。電鍍生產(chǎn)線按照其工藝要求由4臺行車完成,每臺行車都根據(jù)已編制好的各自的程序運(yùn)行。本生產(chǎn)線由32工位組成,7號、15號、22號工位槽為行車的交換工位槽,每臺行車包含的工位槽及該行車工藝流程,如圖1所示。每臺行車由兩個(gè)掛鉤構(gòu)成,分別為A鉤和B鉤,A鉤上是待鍍工件,B鉤是用來實(shí)現(xiàn)工件的交換。行車交換工位,由B鉤先將槽中空鉤提起,然后再將A鉤中掛件放入槽中,這樣很容易實(shí)現(xiàn)將工件送到下一臺行車,完成下面的工藝流程。在行車1工藝流程中有化學(xué)脫脂這一環(huán)節(jié),由于化學(xué)脫脂時(shí)間長,則有A,B槽切換功能。行車1第一次將工件放入A槽進(jìn)行脫脂,完成一個(gè)循環(huán)后,行車第二次將工件放入B槽,然后提起A槽中的工件進(jìn)入下一道工藝。這樣可以節(jié)省工作時(shí)間,提高工作效率。化學(xué)脫脂、電解脫脂、預(yù)鍍銀、鍍銀、防變色、活化、鍍錫、中和以及上下料的時(shí)間由觸摸屏隨意調(diào)整。另外,這些工位需要進(jìn)行溫度控制,由溫控器實(shí)現(xiàn),需要調(diào)整的電壓和電流參數(shù)由觸摸屏設(shè)置,并將實(shí)時(shí)數(shù)據(jù)顯示在觸摸屏上。電解脫脂需要的電流密度為10 A/dm2,預(yù)鍍銀的電流密度為0.1~0.3 A/dm2,鍍銀的電流密度為0.5~1.0 A/dm2,鍍錫的電流密度為 1.0~1.2 A/dm2。這些工位中除霧以及冷淋須由輔機(jī)控制完成。
2 電鍍生產(chǎn)線控制系統(tǒng)硬件配置
根據(jù)工藝要求及其控制要求,選擇三菱Q01型CPU。該CPU的RS-232接口能與使用MC通訊協(xié)議的外部設(shè)備進(jìn)行通訊。此功能使CPU不再需要串行通訊模塊,降低了成本。由于具有自動(dòng)CC-Link啟動(dòng)功能,可以在沒有設(shè)定參數(shù)的情況下啟動(dòng)CC-Link,刷新數(shù)據(jù),減少了人工設(shè)定參數(shù)的時(shí)間。PLC編程更簡單,特殊功能模塊有專門的設(shè)定軟件,基本模式版本支持浮點(diǎn)運(yùn)算、8路 PID,標(biāo)準(zhǔn)RAM增加到128K,支持ST,SFC,FB編程。根據(jù)現(xiàn)場傳感器以及輸入和輸出信號的點(diǎn)數(shù)選擇 PLC的輸入和輸出模塊。由于電解、鍍銀、鍍錫過程中需要采集整流器的電壓和電流參數(shù),模擬量輸入信號為10路,并通過模擬量輸出模塊控制電壓和電流參數(shù)。電壓和電流的控制通過觸摸屏上按鈕進(jìn)行切換控制。工位槽中液體需要加熱則有溫控器和電磁閥來實(shí)現(xiàn)。
本生產(chǎn)線中需要進(jìn)行行車的控制、電壓和電流的控制、工位槽中液體溫度的控制及輔機(jī)的控制,其中,行車的控制是難點(diǎn)。
生產(chǎn)線有4臺行車,每臺行車上有4臺交流異步電機(jī)和2臺行走電機(jī)同步運(yùn)動(dòng),2臺提升電機(jī)負(fù)責(zé)A,B鉤的上下運(yùn)動(dòng),4臺電機(jī)有電磁抱閘機(jī)構(gòu)。行車的行走和A,B鉤的上下運(yùn)動(dòng)不同時(shí)進(jìn)行,A鉤和B鉤的提升、下降也不是同時(shí)進(jìn)行的。行車在運(yùn)行過程中要保證工作效率,所以要快速運(yùn)行,但是要能實(shí)現(xiàn)定位功能,定位時(shí)速度要慢,故采用變頻器進(jìn)行調(diào)速控制。采用減速制動(dòng)以及電磁制動(dòng)相結(jié)合,每臺行車上安裝1臺變頻器驅(qū)動(dòng)的交流異步電動(dòng)機(jī)負(fù)責(zé)行車前進(jìn)、后退,A鉤、B鉤的上下,這樣節(jié)省成本。行車在工作時(shí)通常都懸掛著電鍍工件,如果行車在起動(dòng)和停止的過程中速度太快或不夠平穩(wěn),則懸掛的工件就容易從掛具上掉下。因此,行車的速度用變頻器控制,使之根據(jù)電鍍生產(chǎn)線的實(shí)際情況可調(diào)。行車設(shè)計(jì)有快速、中速和慢速3種運(yùn)行方式。作自動(dòng)運(yùn)行時(shí),PLC通過檢測安裝在行車上的傳感器的各種信號,向變頻器發(fā)出指令,其動(dòng)作狀態(tài)顯示在觸摸屏上。
每臺行車上安裝有一定數(shù)量的傳感器,選用電感式接近開關(guān)。其主要作用是負(fù)責(zé)行車上、下工件定位、鍍槽定位、鍍槽中有無物料以及行車運(yùn)行過程向PLC發(fā)出變速信號等。行車控制信號是通過外部的開關(guān)控制,有手動(dòng)操作和自動(dòng)運(yùn)行模式選擇、單周期和循環(huán)運(yùn)行模式選擇、緊急暫停。自動(dòng)控制設(shè)計(jì)有運(yùn)行、停止和復(fù)位操作按鈕,可以使4臺行車自動(dòng)、同步、循環(huán)運(yùn)行。
3 電鍍生產(chǎn)線PLC程序結(jié)構(gòu)化設(shè)計(jì)
4臺行車的軟件控制采用結(jié)構(gòu)化的程序設(shè)計(jì)方法,程序分為主程序main和功能流程圖程序SFC。由于4臺行車的自動(dòng)運(yùn)行為步進(jìn)式運(yùn)行方式,而且要求具有在自動(dòng)運(yùn)行時(shí)隨時(shí)進(jìn)行手動(dòng)干預(yù)功能,所以在主程序中有4臺行車的手動(dòng)點(diǎn)動(dòng)、手動(dòng)長動(dòng)尋位、自動(dòng)控制程序。另外,主程序中還包括了初始化和啟動(dòng)、位置控制、輔機(jī)的控制、系統(tǒng)的復(fù)位、故障處理、模擬量處理等程序。行車的自動(dòng)工藝流程則由SFC程序完成。
3.1 系統(tǒng)初始化和自動(dòng)啟動(dòng)程序
系統(tǒng)初始化是每一次PLC上電或?qū)LC強(qiáng)制復(fù)位,主要是對在程序中使用到的PLC中各種計(jì)數(shù)器、定時(shí)器、寄存器等進(jìn)行復(fù)位和設(shè)置,同時(shí)保留上次運(yùn)行需要記憶的各種數(shù)據(jù),完成運(yùn)行前的各項(xiàng)準(zhǔn)備工作。
當(dāng)4臺行車全部返回原點(diǎn)并處在自動(dòng)方式時(shí),按下啟動(dòng)按鈕,進(jìn)入自動(dòng)運(yùn)行狀態(tài),自動(dòng)燈指示,啟動(dòng)自動(dòng)程序。其余行車自動(dòng)控制程序中各子塊的設(shè)計(jì)原理是相同的。
3.2 工藝流程SFC程序
由于該電鍍自動(dòng)生產(chǎn)線設(shè)計(jì)有兩種電鍍工藝,分別是鍍銀、鍍錫工藝,每種工藝的工藝流程各不相同,在實(shí)際使用時(shí)可以通過觸摸屏上的工藝選擇開關(guān)加以選擇。由于兩種工藝的編程方式基本相同,文中以鍍銀生產(chǎn)線行車1為例闡述結(jié)構(gòu)化的設(shè)計(jì)方法。
行車1鍍銀SFC程序,如圖2所示。按照圖1中的工藝流程,即:行車行走的工位和在相應(yīng)工位槽中停留的時(shí)間,編制SFC程序,兩種工藝程序步數(shù)不相同,鍍銀程序步數(shù)是70步。由于行車在走自動(dòng)程序時(shí)是步進(jìn)運(yùn)行,不同的步是由不同的電機(jī)工作,而且變頻器在運(yùn)行時(shí)必須先將電動(dòng)機(jī)側(cè)的接觸器先接通,然后變頻器的正反轉(zhuǎn)信號和速度信號才能輸出,這也要求行車必須為步進(jìn)運(yùn)行,屬于較為復(fù)雜的步進(jìn)控制。編制各個(gè)不同電機(jī)的動(dòng)作相應(yīng)的SFC子塊,子塊中包括電機(jī)控制電鍍工件在鍍槽的提升、放下和停留的時(shí)間、行車走多少個(gè)鍍槽以及運(yùn)行速度等。在走自動(dòng)程序時(shí)只需調(diào)用相應(yīng)的子塊即可很方便地完成步進(jìn)控制,邏輯關(guān)系思路清晰,各電機(jī)的動(dòng)作可靠。這樣從0步開始運(yùn)行,并依次執(zhí)行到最后一步結(jié)束或循環(huán)執(zhí)行。在運(yùn)行過程中可隨意進(jìn)行手動(dòng)干預(yù),然后從暫停處往下按順序執(zhí)行下去,直到70步結(jié)束或循環(huán)執(zhí)行。
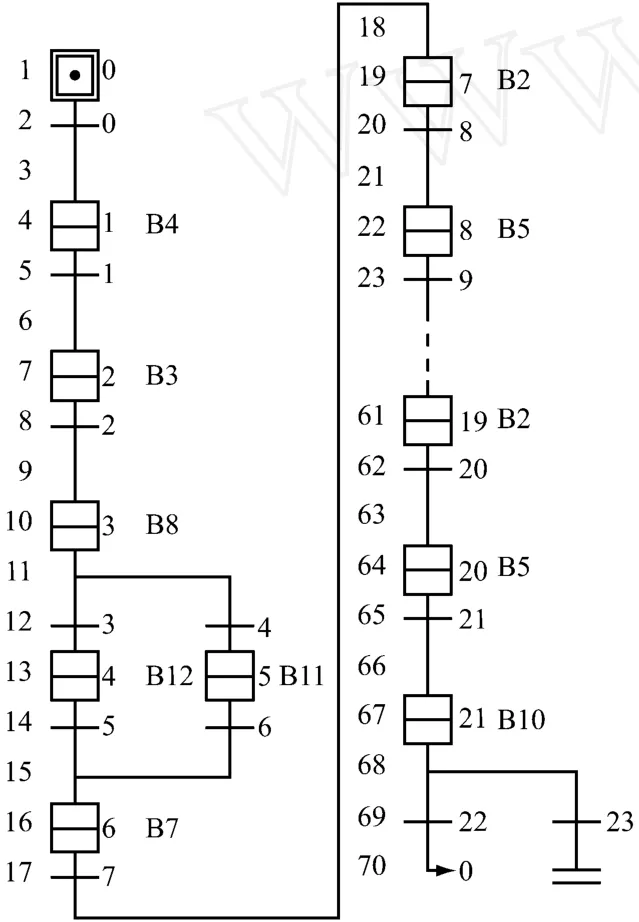
圖2 行車1自動(dòng)控制SFC程序示意圖
3.3 手動(dòng)、自動(dòng)、手動(dòng)尋位程序
行車1運(yùn)行時(shí),其行走電機(jī)、A鉤和B鉤電機(jī)的控制均需要手動(dòng)和自動(dòng)控制,行走電機(jī)還需要進(jìn)行尋位控制,即每次走一個(gè)工位。以行車1的行走電機(jī)控制為例,說明手動(dòng)、自動(dòng)、尋位控制的結(jié)構(gòu)化設(shè)計(jì)方法。
手動(dòng)方式時(shí),點(diǎn)動(dòng)開關(guān)接通,行車1的行走電機(jī)繼電器接通,同時(shí)A鉤和B鉤電機(jī)接觸器不能接通,這樣控制行車電機(jī)繼電器通電;然后行車1的行走電機(jī)制動(dòng)繼電器得電松開,變頻器無故障而且電機(jī)不過載,其正轉(zhuǎn)信號接通,同時(shí)點(diǎn)動(dòng)速度信號接通,行車行走。
自動(dòng)運(yùn)行時(shí),行車1自動(dòng)/手動(dòng)信號接通,其行走電機(jī)繼電器(自動(dòng))信號接通;手動(dòng)尋位時(shí),行車1行走電機(jī)繼電器(長動(dòng))信號接通。這兩種情況下A鉤和B鉤電機(jī)接觸器不能接通,這樣控制行車1行走電機(jī)繼電器通電,變頻器無故障而且電機(jī)不過載,其正轉(zhuǎn)信號接通,同時(shí)高速運(yùn)行信號接通,行車高速行走。到達(dá)減速開關(guān),低速運(yùn)行信號接通,低速運(yùn)行并定位。
行車1的反向行走,就是控制變頻器反轉(zhuǎn)信號得電,原理相同。
A鉤和B鉤電機(jī)的控制原理和行走電機(jī)的控制原理相似。
3.4 復(fù)位和暫停處理
由于行車在工作過程中有時(shí)會有突發(fā)事件或行車需要暫停處理其他的工作,因此在系統(tǒng)中設(shè)計(jì)了復(fù)位和手動(dòng)干預(yù)暫停兩項(xiàng)功能,針對行車不同的情況和需要使用。在任何情況下按下復(fù)位按鈕,程序都將轉(zhuǎn)入復(fù)位子程序塊,停止所有動(dòng)作輸出的同時(shí),計(jì)數(shù)器、定時(shí)器、輔助繼電器和寄存器等全部清零,可進(jìn)入手動(dòng)操作,回原點(diǎn),為下次自動(dòng)程序做準(zhǔn)備。在自動(dòng)運(yùn)行時(shí),將手/自動(dòng)開關(guān)撥到手動(dòng)狀態(tài),即暫停SFC程序中的子程序塊。在暫停的狀態(tài)下,可以進(jìn)行手動(dòng)干預(yù)操作行車,干預(yù)結(jié)束后,將手/自動(dòng)開關(guān)撥到自動(dòng)狀態(tài),從SFC程序中暫停的步繼續(xù)運(yùn)行。
4 結(jié)語
該控制系統(tǒng)程序采用結(jié)構(gòu)化設(shè)計(jì)后,極大地增強(qiáng)了系統(tǒng)的通用性,只需根據(jù)生產(chǎn)廠家的具體情況和不同的工藝流程要求進(jìn)行硬、軟件模塊功能組合,即可構(gòu)成合適的控制裝置,無需重復(fù)研制,縮短了開發(fā)周期,節(jié)省了開發(fā)費(fèi)用,同時(shí)可以提高產(chǎn)品質(zhì)量并降低能耗。采用上述思路設(shè)計(jì)的新型電鍍生產(chǎn)線具有綜合性強(qiáng)、自動(dòng)化程度高、節(jié)能、環(huán)保等特點(diǎn),符合清潔生產(chǎn)的發(fā)展方向,目前生產(chǎn)線已投入運(yùn)行,取得了很好的效果。
[1] 周敏.電鍍錫生產(chǎn)線的自動(dòng)化改造[J].武鋼技術(shù),2000,38(5):58-60.
[2] 馮立明.電鍍工藝與設(shè)備化學(xué)[M].北京:北京工業(yè)出版社,2005.
[3] 盧少燃.電鍍生產(chǎn)線設(shè)計(jì)的新思路[M].電鍍與涂飾,2008,27(10):8-9.
A Research on Electric Control System of Electroplating Production Line
XIA Chang-feng
(Nantong Vocational@amp;amp;Technical Shipping College,Nantong 226006,China)
The requirements of silver plating process in electroplating industry are studied and analyzed,and a high-efficiency and high-automation control plan is put forwarded.Each function for plastic parts plating can be controlled by a comprehensive monitoring system composed of mitsubishi Q01 series programmable controller,mitsubishi GT1275 new touch-screen and frequency converter.This control system has a high reliability and is adaptable to a bad production environment.The system can realize switching between silver plating and tin plating.The procedures,using a structural design,can achieve manual jogging and long moving for location as well as automatic control functions.During automatic process,it can perform fast manual intervention function.The movements of each overhead crane in the system are homogenous.The system also has a crash preventing function to ensure security.
electroplating;automatic control;structured programming
TQ 150.5
A
1000-4742(2011)06-0039-04
2011-01-09
·電 鍍·
猜你喜歡
防爆電機(jī)(2020年3期)2020-11-06 09:07:42
人大建設(shè)(2019年12期)2019-05-21 02:55:44
測控技術(shù)(2018年5期)2018-12-09 09:04:50
中山大學(xué)法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
電子制作(2017年7期)2017-06-05 09:36:13
環(huán)球時(shí)報(bào)(2017-03-30)2017-03-30 06:44:45
中國衛(wèi)生(2015年3期)2015-11-19 02:53:32
政治與法律(2014年11期)2014-03-01 02:20:40
自動(dòng)化博覽(2014年12期)2014-02-28 22:34:39
