基于EMD和短時(shí)拷貝相關(guān)分析方法的物體濺落聲檢測研究
2012-01-10 01:40:46邵建軍
海洋技術(shù)學(xué)報(bào) 2012年2期
孫 昕,邵建軍,薛 飛
(中國人民解放軍91439部隊(duì)96分隊(duì),遼寧 大連 116041)
基于EMD和短時(shí)拷貝相關(guān)分析方法的物體濺落聲檢測研究
孫 昕,邵建軍,薛 飛
(中國人民解放軍91439部隊(duì)96分隊(duì),遼寧 大連 116041)
采用經(jīng)驗(yàn)?zāi)B(tài)分解(Empirical Mode Decomposition,簡稱EMD)和短時(shí)拷貝相關(guān)分析的方法,將經(jīng)過EMD處理得到的濺落聲信號作為拷貝信號,利用拷貝信號與海上實(shí)測信號的波形相關(guān)性實(shí)現(xiàn)濺落聲檢測研究。通過對海試實(shí)測的輻射噪聲數(shù)據(jù)進(jìn)行分析,表明利用EMD和短時(shí)相關(guān)分析方法可以在較低信噪比下檢測出濺落聲信號的存在,從而提高了信號檢測的準(zhǔn)確性。
經(jīng)驗(yàn)?zāi)B(tài)分解;短時(shí)相關(guān)分析;濺落聲
由于條件所限,無法在被測目標(biāo)上加裝合作信標(biāo),因此水中兵器海上試驗(yàn)的落點(diǎn)測量無法采用精度較高的主動(dòng)測量方法,只能依靠被動(dòng)測量方法實(shí)現(xiàn)落點(diǎn)的定位測量。傳統(tǒng)的被動(dòng)定位方法一般是依靠目標(biāo)自身的特征信息(如目標(biāo)的輻射噪聲、物體入水信號等)實(shí)現(xiàn)定位測量,因此實(shí)現(xiàn)對入水信號的穩(wěn)健檢測就成為落點(diǎn)定位測量關(guān)鍵之一。一般稱物體發(fā)射入水過程中產(chǎn)生的突發(fā)瞬態(tài)信號為濺落聲[1](包括物體擊水聲、氣泡脈動(dòng)聲及物體結(jié)構(gòu)振動(dòng)產(chǎn)生的輻射噪聲)。研究表明[2],濺落聲的強(qiáng)度與物體的入水角度、速度、外形等都有一定關(guān)系,特別是在淺海使用環(huán)境下,由于受到淺海較強(qiáng)背景噪聲的影響,濺落聲的信噪比較低,因此,利用傳統(tǒng)的信號處理技術(shù)對其進(jìn)行檢測具有較大的難度。
EMD是一種基于信號的局部特征時(shí)間尺度把多分量信號分解為若干個(gè)具有某種物理意義單分量信號的數(shù)據(jù)處理方法[3]。各階單分量信號(固有模態(tài)函數(shù),Intrinsic Mode Function簡稱IMF)突出了數(shù)據(jù)的局部特征,通過對其分析,可以準(zhǔn)確地把握原始信號的特征信息,具有非常好的局部適應(yīng)性,適用于非線性、非穩(wěn)態(tài)過程信號分析。在信號處理、特征提取等方面具有廣闊的應(yīng)用前景[4-8]。
拷貝相關(guān)檢測通常用于主動(dòng)信號處理,將發(fā)射信號的拷貝波形和接收信號作互相關(guān)運(yùn)算,實(shí)質(zhì)上利用信號波形的相似度來實(shí)現(xiàn)低信噪比條件下的信號快速檢測。拷貝相關(guān)檢測需要對信號有足夠的先驗(yàn)知識。魚雷等水中兵器在作戰(zhàn)使用中,為了減少入水拍擊對雷體的損害,雷體在一定范圍內(nèi)以某種角度和速度入水時(shí)產(chǎn)生的濺落信號波形結(jié)構(gòu)就會(huì)比較固定。如果能夠有良好的拷貝信號,利用短時(shí)相關(guān)法可以在較低的信噪比條件下檢測到入水聲。此檢測方法不需要已知背景噪聲的分布形態(tài),只需要背景噪聲的相關(guān)程度較低即可具備檢測條件。采用EMD和短時(shí)拷貝相關(guān)分析方法進(jìn)行濺落聲檢測研究很少見到報(bào)道。本文將經(jīng)過EMD預(yù)處理得到足夠樣本的濺落聲信號作為拷貝信號,利用短時(shí)拷貝相關(guān)分析方法進(jìn)行了檢測高速物體入水的濺落聲信號研究。
1 入水濺落聲特征分析
物體自空中入水是一類特殊的流體動(dòng)力問題,相關(guān)研究表明[2]入水通常可分為3個(gè)階段:
(1)初始擊水階段,從物體撞擊水面起到物體尾部空腔開始形成時(shí)為止。此階段由于水的突然作用,物體承受很大的沖擊力和阻尼,物體具有很大的負(fù)加速度,但物體速度仍接近入水速度。
(2)空腔形成階段,隨著物體在水中的運(yùn)動(dòng),其尾部拖著一個(gè)延伸到水面的空腔,然后在水面附近封閉,在封閉的同時(shí)往往伴隨著水柱或水花的升起。
(3)氣泡脈動(dòng)階段,空腔封閉后形成的氣泡在環(huán)境壓力作用下多次脈動(dòng),在該階段物體速度已降至最低,且在某一時(shí)刻與氣泡脫離。
魚雷入水屬于高速物體入水問題,而且魚雷是一個(gè)頭部為流線型的細(xì)長柱體,其入水角度與其質(zhì)心運(yùn)動(dòng)速度有一定夾角。因此,其入水過程較前面所描述的更為復(fù)雜[9]。與入水過程相聯(lián)系,不難理解魚雷入水過程中所產(chǎn)生的濺落聲主要包括擊水聲和氣泡脈動(dòng)聲這兩種主要的聲源。除此之外,魚雷入水還可能產(chǎn)生雷體的振動(dòng)輻射、高溫水汽化效應(yīng)及濺起的水花落下時(shí)所產(chǎn)生的二次擊水聲。但是它們所包含的能量較低,產(chǎn)生的信號弱,對總噪聲的貢獻(xiàn)不大,通常可以忽略不計(jì)。因此,魚雷入水所產(chǎn)生的濺落聲在接收信號波形上表現(xiàn)為擊水聲、“寂靜”區(qū)間和衰減震蕩信號3部分。
“寂靜”區(qū)間的長度只能一定程度上反映入水物體的尺度特征,沒有更多有價(jià)值的信息。所以,研究內(nèi)容著重分析擊水聲脈沖的聲輻射特性。設(shè)流線型物體以速度v與水面成θ角入水,聲壓接收點(diǎn)相對入水點(diǎn)的矢徑為r,其幾何關(guān)系如圖1所示。
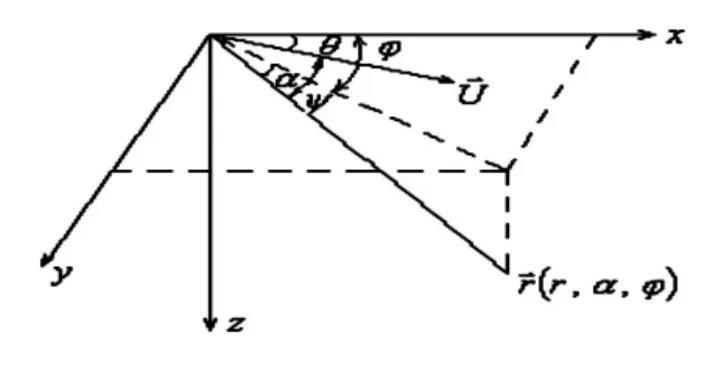
圖1 物體入水的幾何關(guān)系
由于擊水聲脈沖由雷頭撞擊水面產(chǎn)生,所以其輻射聲源緊貼水面,具有偶極子型聲源的特點(diǎn)。根據(jù)運(yùn)動(dòng)偶極子聲源理論,在文獻(xiàn)[2]中描述了聲壓幅度為:

式中:ρ0為物體密度;D為物體尺度;K(θ)為依賴入水角θ的某一系數(shù)。其聲壓自譜為:

式中:g(St)為無因次頻譜函數(shù)。由(1)式、(2)式可見,當(dāng)v<<C時(shí),聲壓的幅度和入水速度的3次冪成比例,其能量與入水速度5/2次冪及物體尺度的3/2次冪成正比。水中兵器發(fā)射入水時(shí)速度較高,其能量將集中在相對較高頻帶。
2 經(jīng)驗(yàn)?zāi)B(tài)分解和短時(shí)拷貝相關(guān)檢測
2.1 經(jīng)驗(yàn)?zāi)B(tài)分解方法
EMD方法作為希爾伯特—黃變換(簡稱:HHT)的核心,其實(shí)質(zhì)是利用信號在時(shí)間序列上下包絡(luò)的平均值確定瞬時(shí)平衡位置,進(jìn)而把非平穩(wěn)信號分解為一組有限個(gè)IMF和一個(gè)余項(xiàng)之和的形式。盡管EMD方法的正交性無法證明,但在文獻(xiàn)[4]中,Huang等在數(shù)值上對EMD方法進(jìn)行了正確性檢驗(yàn)。IMF必須滿足以下兩個(gè)特征:(1)極值點(diǎn)(極大值或極小值)與過零點(diǎn)數(shù)目相等或最多差一個(gè);(2)由局部極大值和極小值所擬合的上、下包絡(luò)曲線的均值曲線處處為零,即關(guān)于時(shí)間軸局部對稱。IMF的上述兩個(gè)特征,也是EMD分解的最終收斂準(zhǔn)則。原始信號s(t)經(jīng)過EMD分解后,可以表示為:

式中:ci(t)稱為固有模態(tài)函數(shù);rn(t)稱為殘余函數(shù),代表信號的平均趨勢。
2.2 短時(shí)拷貝相關(guān)檢測
相關(guān)分析技術(shù)是應(yīng)用噪聲隨機(jī)性的特點(diǎn),通過自相關(guān)或互相關(guān)運(yùn)算去除噪聲,從而有效實(shí)現(xiàn)信號檢測的一種技術(shù)[10-12]。為了檢測信號的瞬變特點(diǎn),將輸入信號分成和拷貝信號長度一樣的段來和拷貝信號進(jìn)行相關(guān)計(jì)算,所以稱此相關(guān)檢測為短時(shí)拷貝相關(guān)檢測。
一般情況下,定義N點(diǎn)的短時(shí)相關(guān)函數(shù)[13]:

在現(xiàn)代計(jì)算機(jī)技術(shù)和信號處理技術(shù)的發(fā)展下,短時(shí)拷貝相關(guān)檢測可以利用DSP技術(shù)實(shí)現(xiàn),寄存器存儲和濺落聲信號拷貝Simf(t)相同長度的采樣點(diǎn)。每次采樣后,只要將移位寄存器中的數(shù)據(jù)和存儲拷貝信號波形數(shù)據(jù)作內(nèi)積,就可以輸出當(dāng)前時(shí)刻的相關(guān)值,實(shí)現(xiàn)寄存器中的數(shù)據(jù)更新。如果將背景噪聲認(rèn)為均值μ,方差σ2的高斯噪聲,其密度函數(shù)為:

濺落信號達(dá)到之前,接收到的都是背景噪聲,此時(shí)檢測器輸出的期望值為:

信號的波形認(rèn)為確知,而且與噪聲統(tǒng)計(jì)獨(dú)立,所以(6)式可以寫成:
信號Simf(t)中的氣泡脈動(dòng)震蕩波形是對稱的,其均值為0,而且擊水聲脈沖的持續(xù)時(shí)間很短,對相關(guān)輸出的貢獻(xiàn)不大,所以當(dāng)μ=0時(shí),檢測其輸出的期望值為0。在信號完全達(dá)到并且和拷貝信號達(dá)到匹配時(shí),檢測器輸出的相關(guān)峰值即為信號的能量E0。
3 試驗(yàn)數(shù)據(jù)分析
為了驗(yàn)證EMD和短時(shí)拷貝相關(guān)檢測在低信噪比情況下對濺落聲檢測的有效性,試驗(yàn)選取某次海試中所測輻射噪聲數(shù)據(jù)進(jìn)行分析。原始信號聲壓波形(采樣率約為41 kHz)如圖2所示。
根據(jù)海上試驗(yàn)紀(jì)錄,物體濺落聲約2.6 s出現(xiàn),此前均為背景噪聲。從圖3對擊水聲出現(xiàn)前后各20 ms的噪聲數(shù)據(jù)分析獲得的時(shí)頻圖可見,濺落聲及其后出現(xiàn)的輻射噪聲均淹沒在較強(qiáng)的背景噪聲中,對其進(jìn)行瞬態(tài)信號檢測較為困難。
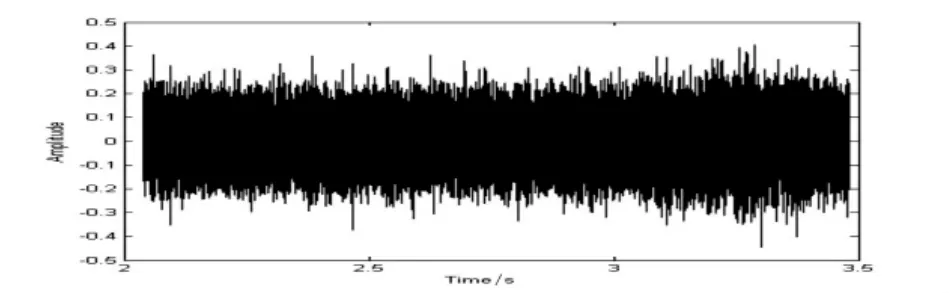
圖2 信號時(shí)域波形

圖3 局部信號時(shí)域波形和時(shí)頻圖
為便于問題分析,試驗(yàn)截取包含濺落聲的0.8 s的輻射噪聲數(shù)據(jù)加以分析。從本文的前部分可知,高速物體入水速度較高,其能量將集中在相對較高頻帶(一般為幾kHz以上),首先對信號進(jìn)行5 kHz的高通濾波的預(yù)處理。將濾波后的數(shù)據(jù)經(jīng)EMD分解結(jié)果如圖4所示,其中IMF0為原始數(shù)據(jù),IMF1~I(xiàn)MF13為分解的各階模態(tài)分量。由于EMD分解會(huì)產(chǎn)生一些不屬于原始信號的IMF成分,例如:EMD過分解現(xiàn)象會(huì)產(chǎn)生“偽成分”,為了消除這種現(xiàn)象,可以利用原始信號與IMF進(jìn)行相關(guān)分析,選取適當(dāng)?shù)南嚓P(guān)系數(shù),將低于此系數(shù)的IMF分量去除,從而實(shí)現(xiàn)“偽成分”剔除。表1為經(jīng)過相關(guān)處理后的IMF與信號的互相關(guān)系數(shù),可見,在1~4階的IMF分量中可以明顯檢測到濺落聲信號,對前四階累加信號Simf(t)進(jìn)行時(shí)頻分析,其中:

其結(jié)果如圖5所示,濺落聲(包含擊水聲、氣泡脈動(dòng)聲)的持續(xù)時(shí)間大約在幾十毫秒以內(nèi),其中擊水聲信號的持續(xù)時(shí)間一般在2~3 ms以內(nèi),濺落聲能量峰值滯后于擊水聲時(shí)刻,可以認(rèn)為濺落聲的能量來源主要來源于氣泡振蕩向外輻射的能量。
為了檢驗(yàn)短時(shí)拷貝相關(guān)檢測的效果,選取經(jīng)EMD分解后的“良好”濺落信號作為拷貝樣本Simf(t),將拷貝樣本信號Simf(t)與待檢測信號(如圖6所示)進(jìn)行短時(shí)相關(guān)檢測,檢測結(jié)果如圖7所示,可見利用短時(shí)相關(guān)可以在較低信噪比下檢測出濺落聲信號的存在。

表1 IMF與信號的互相關(guān)系數(shù)表
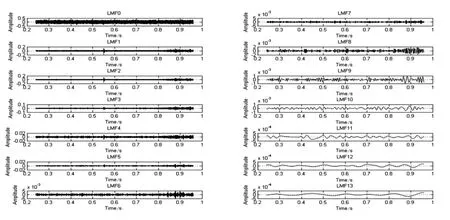
圖4 信號EMD分解
4 結(jié)論
將EMD和短時(shí)拷貝相關(guān)檢測相結(jié)合的方法可以有效實(shí)現(xiàn)對具有典型局部特征的瞬態(tài)信號檢測。采用短時(shí)拷貝相關(guān)檢測方法要求拷貝信號準(zhǔn)確性的條件,可通過對大量的實(shí)測信號分析從而總結(jié)濺落信號的典型波形結(jié)構(gòu)作為拷貝信號實(shí)現(xiàn)。在理論上,濺落聲信號與接收基陣和物體入水點(diǎn)的空間相對位置等因素有關(guān);在實(shí)際測量中,由于測量點(diǎn)一般均滿足遠(yuǎn)場測量條件,濺落聲脈沖波形結(jié)構(gòu)就會(huì)相對固定。因此,在實(shí)際工程應(yīng)用中,可以利用EMD方法對大量實(shí)測信號的提取和分析,從而確立良好的濺落聲拷貝信號結(jié)構(gòu)并預(yù)先存儲在檢測系統(tǒng),將拷貝信號與測量信號進(jìn)行短時(shí)拷貝相關(guān),即可在較低的信噪比的條件下實(shí)現(xiàn)對濺落聲的快速檢測。這種檢測方法免除了已知背景噪聲的分布形態(tài)條件,只要背景噪聲的相關(guān)程度較低即可實(shí)現(xiàn)。

圖5 擊水信號及時(shí)頻圖
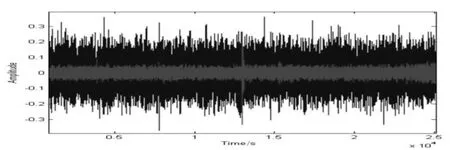
圖6 信號與拷貝信號波形
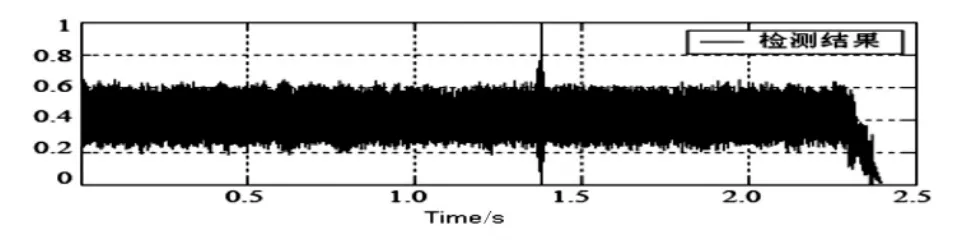
圖7 短時(shí)拷貝相關(guān)檢測結(jié)果
[1]湯渭霖.水下噪聲學(xué)原理[M].哈爾濱船舶工程學(xué)院,1984.
[2]鮑筱玲.擊水聲特性研究[J].哈爾濱船舶工程學(xué)院學(xué)報(bào),1981(1):27-39.
[3]Huang N E,Z Shen,S R Long,et al.The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis[J].Proc R Soc,1998;A454:903-995.
[4]Pilkar R,Bollt E,Robinson C.Empirical mode decomposition/Hibert transform analysis of postural responses to small amplitude anterior-posterior sinusoidal translations ofvaryingfrequencies[J].Mathematical Biosciences and Engineering,2011,8(4):1085-1097.
[5]Braun S,Feldman M.Decomposition of non-station-ary signals into varying time scales:some aspects of the EMD and HVD methods[J].Mechanical Systems and Signal Processing,2011,25(7):2608-2630.
[6]Fleureau J,Kachenoura A,Albeera L,et al.Multi-variate empirical mode decomposition and appli-cation tomultichannel filtering[J].Signal Processing,2011,91(12):2783-2792.
[7]李關(guān)防,趙安邦,惠俊英,等.基于經(jīng)驗(yàn)?zāi)B(tài)分解的物體入水聲檢測及測向研究[J].聲學(xué)學(xué)報(bào),2008,33(6):548-554.
[8]穆玉濤,方世良.Hilbert-Huang變換在水聲瞬態(tài)信號處理中的應(yīng)用[J].聲學(xué)技術(shù),2007,26(5):992-993.
[9] 嚴(yán)忠漢.試論魚雷入水問題[J].中國造船,2002,43(3):88-93.
[10]王傳菲,安鋼,等.基于EMD和相關(guān)的滾動(dòng)軸承故障包絡(luò)譜分析[J].煤礦機(jī)械,2010,31(06):237-240.
[11]楊述斌,彭復(fù)員,等.基于相關(guān)和小波分析的激光水下目標(biāo)檢測研究[J].計(jì)算機(jī)仿真,2003,20(5):17-19.
[12]畢果,陳進(jìn),等.基于相關(guān)分析的包絡(luò)技術(shù)在齒輪特征信息識別中的應(yīng)用[J].機(jī)械科學(xué)與技術(shù),2007,26(4):408-411.
[13]吳淼.現(xiàn)代工程信號處理及應(yīng)用[M].北京:中國礦業(yè)大學(xué)出版社,1997.
Research on the Detection of Splashing Signal of Object Based on EMD and Short-time Correlation Analysis Method
SUN Xin,SHAO Jian-jun,XUE Fei
(Unit 96,Navy Forces 91439,PLA,Dalian Liaoning 116041,China)
EMD and short-time correlation analysis were used to detect the splashing signal of object,which was preprocessed by EMD and then duplicated to be analyzed the waveform correlation with sea trial signal.The method was tested using the radiation noise on the sea trial.The result shows that EMD and short-time correlation analysis could detect the splashing signal in lower SNR.It can improve the accuracy of signal detection.
EMD;short-time correlation analysis;splashing signal
TB566
A
1003-2029(2012)02-0022-05
2011-10-20
孫昕(1972-),男,碩士,工程師,主要從事水聲測量與靶標(biāo)技術(shù)研究。Email:sunxin_1972@163.com
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00