基于Matlab的共軛平行分度凸輪的分析計(jì)算
2012-01-15 06:03:02王蕊照鈔紅曉王開政
電子設(shè)計(jì)工程 2012年16期
關(guān)鍵詞:設(shè)計(jì)
高 英,王蕊照,鈔紅曉,王開政
(西北機(jī)電工程研究所 陜西 咸陽 712000)
平行分度凸輪是用于兩平行軸間的一種間歇傳動(dòng)機(jī)構(gòu),具有傳動(dòng)平穩(wěn)、承載能力大等優(yōu)點(diǎn)。某機(jī)構(gòu)分度凸輪為3分度,傳動(dòng)、結(jié)構(gòu)設(shè)計(jì)決定了該凸輪驅(qū)動(dòng)角范圍為49°~52°,這與以往工程應(yīng)用中至少90°驅(qū)動(dòng)角的情況有很大不同。驅(qū)動(dòng)角過小帶來的問題首先是曲線輪廓難以設(shè)計(jì),部分參數(shù)選擇在傳統(tǒng)設(shè)計(jì)手冊(cè)上無法查到;其次是壓力角過大,工況惡劣,在高速運(yùn)轉(zhuǎn)的情況下很容易造成沖擊變形。該機(jī)構(gòu)每一個(gè)運(yùn)動(dòng)循環(huán)凸輪分度機(jī)構(gòu)作一次分度運(yùn)動(dòng),凸輪旋轉(zhuǎn)一周,凸輪轉(zhuǎn)速很高,而平行分度凸輪機(jī)構(gòu)一般是在中低速情況下工作[1-2]。這些都決定了該凸輪機(jī)構(gòu)設(shè)計(jì)的難度。
1 平行分度機(jī)構(gòu)的基本設(shè)計(jì)方法
1.1 滾子盤與分度凸輪運(yùn)動(dòng)關(guān)系
平行分度凸輪機(jī)構(gòu)工作原理圖如圖1所示。平行分度凸輪設(shè)計(jì)的初始條件一般包括表所示的運(yùn)動(dòng)參數(shù)和幾何參數(shù)如表1所示。
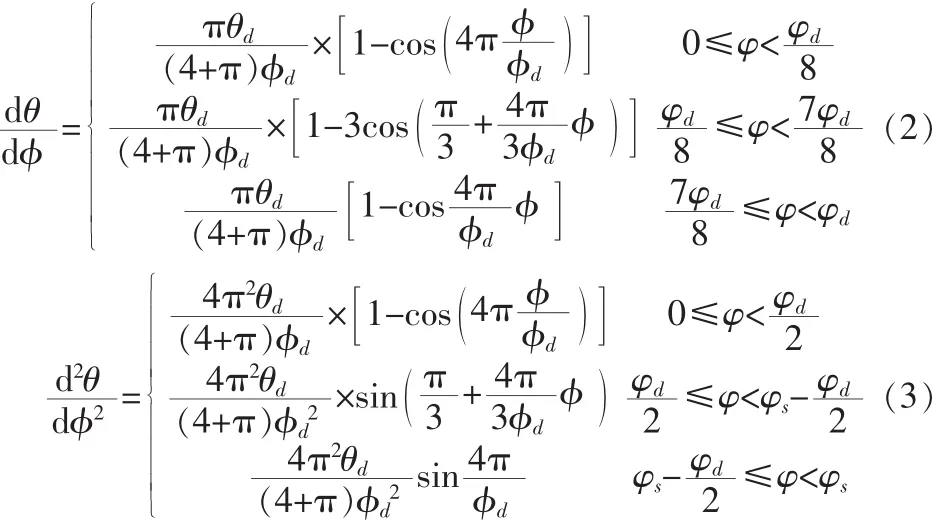
θ與φ關(guān)系是θ對(duì)φ二階導(dǎo)數(shù)連續(xù),該自動(dòng)機(jī)射速較高,故選用適合高速運(yùn)動(dòng)的改進(jìn)正弦曲線規(guī)律[3],方程如下:
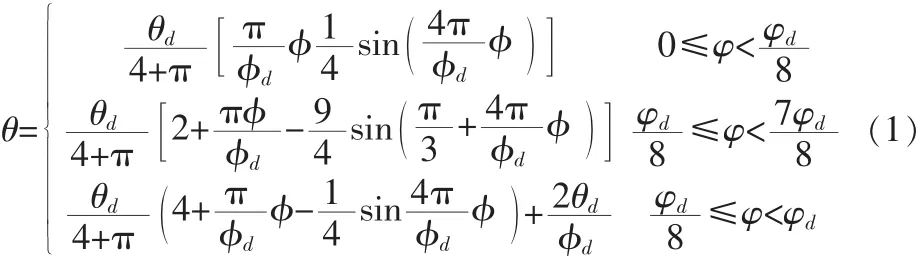
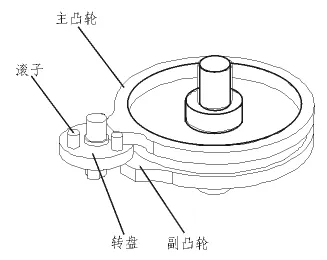
圖1 平行分度凸輪結(jié)構(gòu)圖Fig.1 Parallel indexing mechanism structure diagram
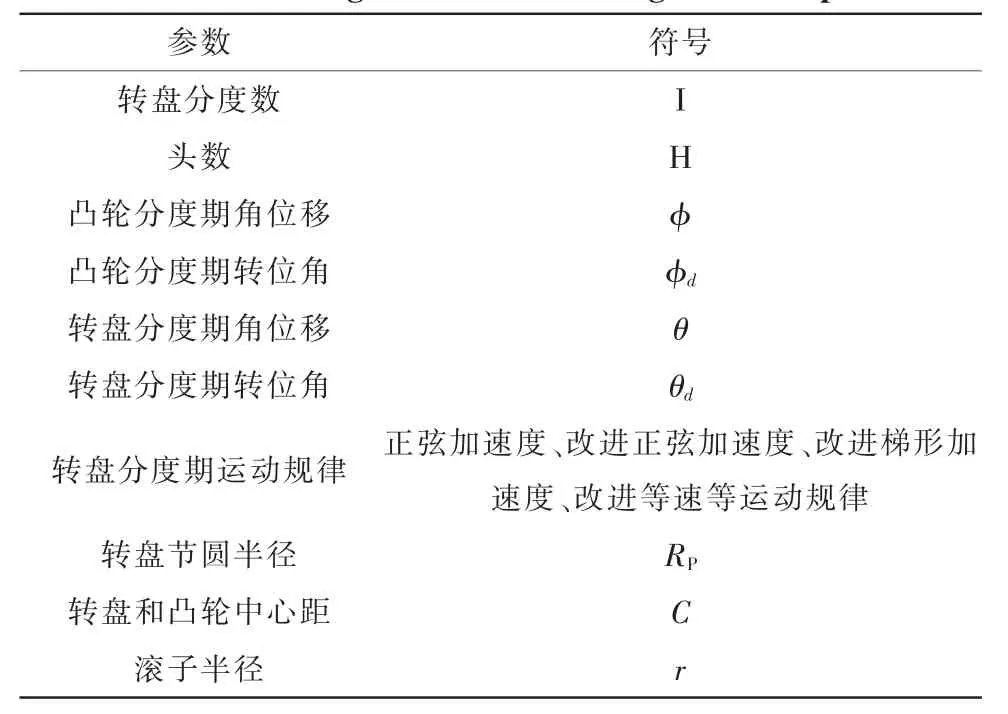
表1 平行分度凸輪運(yùn)動(dòng)參數(shù)和幾何參數(shù)Tab.1 Parallel indexing cam movement and geometrical parameters
1.2 分度凸輪輪廓計(jì)算
1.2.1 凸輪理論輪廓計(jì)算
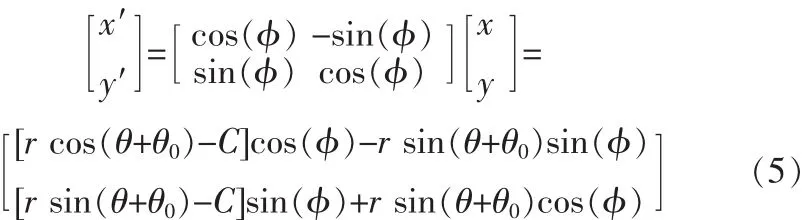
建立兩坐標(biāo)系XOY和 X1OY1,XOY為固定坐標(biāo)系,X1OY1為順時(shí)針旋轉(zhuǎn)坐標(biāo)系,即它固定在凸輪上,隨凸輪旋轉(zhuǎn)與XOY夾角為φ,如圖2所示。
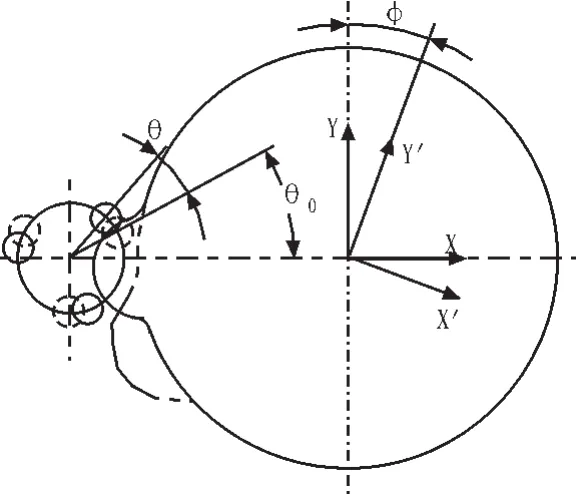
圖2 平行分度凸輪機(jī)構(gòu)解析法計(jì)算示意圖Fig.2 Diagram of parallel indexing cam mechanism analytic calculation
當(dāng)從動(dòng)輪旋轉(zhuǎn),在XOY坐標(biāo)下從動(dòng)輪滾柱中心移動(dòng)軌跡如下式:

θ0為滾柱的初始角度。
在X1OY1坐標(biāo)下從動(dòng)輪滾柱中心移動(dòng)軌跡如下式
上式就是凸輪的理論輪廓曲線,φ和θ的關(guān)系確定后,上式就是關(guān)于的參數(shù)方程。
1.2.2 凸輪實(shí)際輪廓計(jì)算
凸輪的理論輪廓曲線是沿實(shí)際輪廓曲線的法線方向偏移滾柱半徑r距離[4]。由于理論輪廓曲線和實(shí)際輪廓曲線對(duì)應(yīng)點(diǎn)上法線方向是相同的,故可用理論輪廓曲線沿其法線方向偏移滾柱半徑r得到實(shí)際輪廓曲線。
由下式計(jì)算實(shí)際輪廓曲線,也是關(guān)于φ的參數(shù)方程

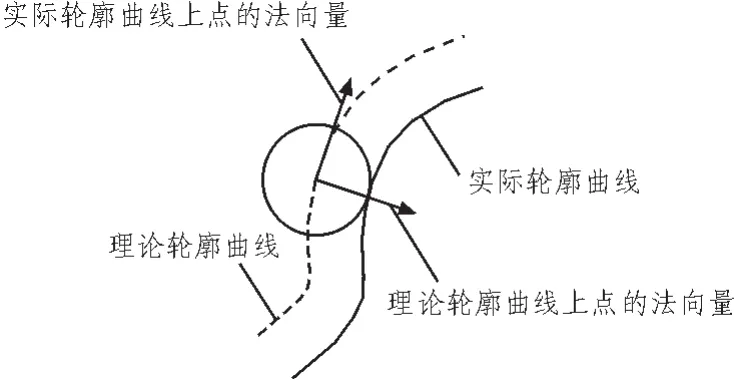
圖3 實(shí)際輪廓線和理論輪廓線的關(guān)系Fig.3 Relationship between the actual contour and the theoretical contour
2 示例與仿真
依據(jù)以上的設(shè)計(jì)方法,利用MATLAB編寫了仿真程序,并采用GUI Builder編寫了仿真界面,便于參數(shù)化設(shè)計(jì)[5]。機(jī)構(gòu)的基本參數(shù)以及選擇的運(yùn)動(dòng)規(guī)律是:中心距C=65 mm,RP=11 mm,滾子半徑 r=5 mm,φd=52°,選取改進(jìn)正弦運(yùn)動(dòng)規(guī)律,計(jì)算仿真結(jié)果如圖4所示。
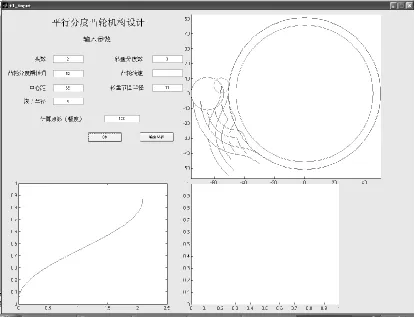
圖4 仿真計(jì)算結(jié)果Fig.4 Simulation results
3 結(jié) 論
文中提出了一種利用Matlab變成實(shí)現(xiàn)平行分度凸輪設(shè)計(jì),利用GUI Builder編寫了仿真界面,解決了工程實(shí)際中的難題[6]。采用該方法有以下幾個(gè)突出優(yōu)點(diǎn):1)該方法通用性強(qiáng),可以計(jì)算多種形式的平行分度凸輪;2)采用圖形顯示,設(shè)計(jì)結(jié)果一目了然,具有良好的人機(jī)界面;3)計(jì)算得到的數(shù)據(jù)直接輸出為文本文件,導(dǎo)入三維設(shè)計(jì)軟件即可完成建模;4)完整的參數(shù)化設(shè)計(jì),便于調(diào)整參數(shù)進(jìn)行對(duì)比分析。
[1]王中發(fā).機(jī)械設(shè)計(jì)[M].北京:北京理工大學(xué)出版社,1998.
[2]張志涌.精通MATLAB(5.3)版[M].北京:航空航天大學(xué)出版社,2000.
[3]彭國勛,肖正揚(yáng).自動(dòng)機(jī)械的凸輪設(shè)計(jì)[M].北京:北京理工大學(xué)出版社,1990.
[4]付瑩瑩.平行分度凸輪輪廓解析設(shè)計(jì)新方法及其應(yīng)用[J].機(jī)床與液壓,2009,37(5):152-154 FU Ying-ying.A new analytical design method of parallel indexing cam contour and its application[J].Machinetool&Hydraulics,2009,37(5):152-154
[5]鄒慧君,殷鴻梁.間歇運(yùn)動(dòng)機(jī)構(gòu)設(shè)計(jì)與應(yīng)用創(chuàng)新[M].北京:機(jī)械工業(yè)出版社,2008.
[6]張賢明.MATLAB語言及應(yīng)用案例[M].江蘇:東南大學(xué)出版社,2010.
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04