基于SIMPACK的四軸電力機車運行平穩性分析
2012-01-16 08:25:02鄭凱飛
城市軌道交通研究 2012年1期
關鍵詞:標準
鄭凱飛 沈 鋼
(同濟大學鐵道與城市軌道交通研究院,201804,上海∥第一作者,碩士研究生)
SIMPACK是機械系統運動學及動力學仿真分析軟件,能輔助工程師對所設計的各種復雜機械系統進行動力學性能仿真分析。其基本原理是通過搭建CAD模型(包括鉸、力元素等)來建立機械系統的動力學方程,并通過先進的解算器來獲取系統的動力學響應。它采用最新的解算技術,提供了同類產品中最快的解算速度,在保證極高解算精度和穩定性的同時不失友好的操作特性。本文以四軸電力機車為研究對象,利用SIMPACK建立機車的多體動力學模型;在標準軌道譜的激勵下,計算分析機車在標準軌道上以不同速度運行時的平穩性。
1 四軸電力機車的多體動力學模型
機車是個復雜系統,包含大量的實體,如底架、轉向架構架、車軸、車輪、電機等。多數情況下這些實體考慮成具有質量屬性(質量或慣量)的剛體。在實際研究中應根據車輛類型及其動力學特點來劃分剛體及自由度。利用多體動力學軟件SIMPACK建立的四軸電力機車的仿真模型如圖1所示。
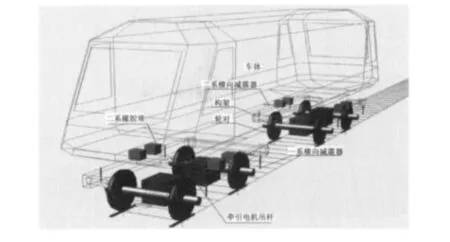
圖1 四軸電力機車模型
機車由車體、構架、輪對、一系懸掛裝置、二系懸掛裝置、牽引電機、電機吊掛裝置和牽引機構等組成。車體通過二系懸掛裝置坐在構架上。二系懸掛裝置由8個橡膠堆組成。每一構架的二系懸掛安裝了2個橫向減振器。每構架通過一系懸掛裝置和輪對連接。一系懸掛裝置由軸箱彈簧、一系垂向減振器和軸箱拉桿等組成。牽引電機一端抱在車軸上,另一端通過橡膠塊與電機吊桿連接在一起。電機吊桿通過轉動銷與構架連接。牽引裝置采用中心銷牽引,在中心銷處設置20mm的橫向間隙。由于車體和構架間的垂向相對位移很小,因此牽引機構對車體和構架之間的垂向相對運動沒有約束。也就是說,牽引機構不傳遞垂向力。
2 四軸電力機車的輪軌接觸幾何關系
四軸電力機車的踏面外形采用JM3磨耗形踏面,軌道采用我國60kg鋼軌的踏面外形。四軸電力機車的輪軌接觸幾何關系見圖2。
車輪的名義滾動圓半徑為525mm,軌距為1 435mm,輪對內側距為1 353mm,名義滾動圓之間的距離為1 493mm,軌底坡為1/40。當輪對的橫移量在0~4mm之間變化時,車輪踏面的等效斜度基本不變,大約為0.12;當輪對的橫移量在4~8mm之間變化時,車輪踏面的等效斜度約從0.12逐漸增大到0.25。輪緣厚度按34mm計算,輪軌間隙為14mm。
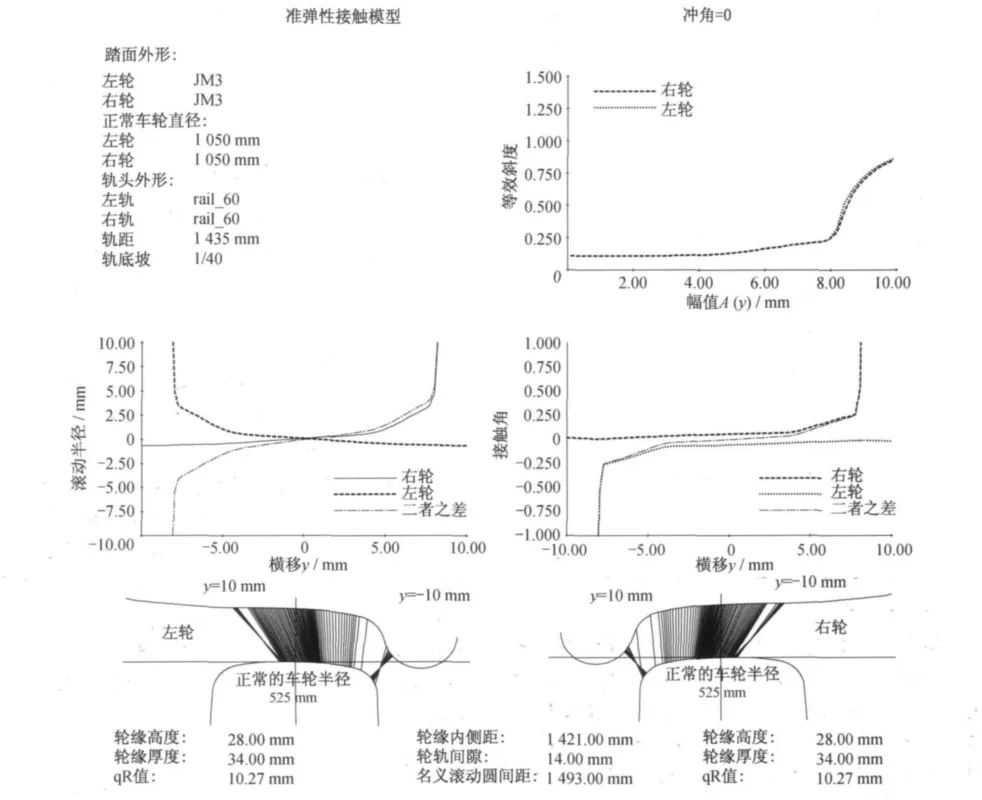
圖2 輪軌接觸幾何關系
3 四軸電力機車平穩性分析
3.1 垂向平穩性
垂向平穩性計算在時域中進行。線路不平順等級為美國5、6級線路,包括左、右軌的橫向不平順和垂向不平順。垂向平穩性指標的評定等級參照TB/T 2360—93《鐵道機車動力學性能試驗鑒定方法及評定標準》,其評定等級的界限值見表1。

表1 垂向平穩性指標的評定等級界限值
四軸電力機車在5、6級線路上運行時的垂向平穩性指標見表2。表中v為機車運行速度,Wzq、Wzh分別為前、后司機室的垂向平穩性指標。由表2可見,當四軸電力機車在5級線路上運行、運行速度為60km/h以下時的垂向平穩性指標達到優良標準,運行速度在70km/h、80km/h時的垂向平穩性指標達到良好標準,運行速度在90km/h、100km/h時的垂向平穩性指標達到合格標準;四軸電力機車在6級線路上運行時的垂向平穩性指標達到優良標準。

表2 垂向平穩性指標
3.2 橫向平穩性
橫向平穩性計算也是在時域中進行的。線路不平順等級為美國5、6級線路,包括左、右軌的橫向不平順和垂向不平順。橫向平穩性指標的評定等級參照TB/T 2360—93《鐵道機車動力學性能試驗鑒定方法及評定標準》,其評定等級的界限值見表3。
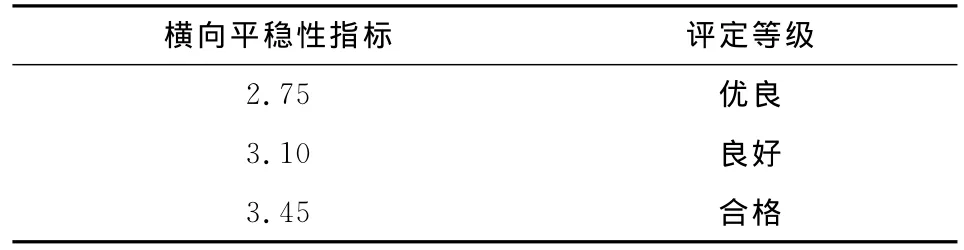
表3 橫向平穩性指標的評定等級界限值
四軸電力機車在5、6級線路上運行時的橫向平穩性指標見圖3。由圖3可看出,四軸電力機車在5、6級線路上的橫向平穩性指標在所有計算速度下均達到了優良標準。
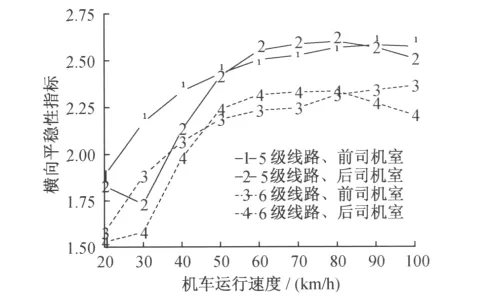
圖3 四軸電力機車前、后司機室的橫向平穩性指標
4 四軸電力機車結構參數對平穩性的影響
研究四軸電力機車結構參數對平穩性的影響,主要是分析懸掛參數對垂向平穩性指標和橫向平穩性指標的影響。懸掛參數主要考慮:一系懸掛橫向剛度、一系軸箱縱向定位剛度、一系軸箱垂向剛度、一系垂向減振器、二系橡膠堆的縱橫向剛度和二系橫向減振器。本文選取運行速度為100km/h、具有美國5級線路不平順的直線軌道,分析機車結構參數對平穩性的影響。
一系懸掛橫向剛度對四軸電力機車垂向平穩性指標,在橫向剛度為1~7kN/mm時,前司機室均為3.30,后司機室均為3.26;對橫向平穩性的影響見圖4。可見,一系懸掛橫向剛度對四軸電力機車的垂向平穩性指標沒有影響;前司機室的橫向平穩性指標隨著一系懸掛橫向剛度的增加而減小,后司機室的橫向平穩性指標隨著一系懸掛橫向剛度的增加而變大。
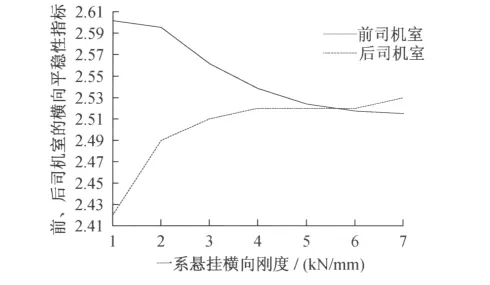
圖4 一系懸掛橫向剛度對前、后司機室橫向平穩性指標的影響
一系軸箱縱向定位剛度對四軸電力機車垂向平穩性和橫向平穩性的影響見表4和圖5。

表4 一系縱向剛度對前后司機室垂向平穩性指標的影響

圖5 一系縱向剛度對前后司機室橫向平穩性指標的影響
由表4和圖5可知,一系軸箱縱向定位剛度對四軸電力機車垂向平穩性指標影響不大,但增大軸箱縱向定位剛度對降低橫向平穩性和橫向輪軌動作用力略為有利。
鑒于篇幅限制,其他懸掛參數的仿真不再一一贅述,只給出如下仿真結果:
(1)一系軸箱垂向剛度對四軸電力機車前、后司機室的橫向平穩性指標幾乎沒有影響。減小一系軸箱的垂向剛度,司機室的垂向平穩性指標降低,平穩性得到改善。因此,對于二系懸掛采用橡膠堆的機車,一般一系懸掛的靜撓度都在100mm以上。
(2)增大二系單個橡膠堆的縱、橫剛度對司機室的垂向平穩性指標幾乎沒有影響。隨著二系縱、橫向剛度的增加,前后司機室的橫向平穩性指標顯著增大。因此,增大二系縱、橫向剛度對機車的橫向平穩性指標非常不利。
(3)二系橫向減振器阻尼對機車的垂向動力學性能影響很小。當機車在5級線路上以100km/h運行時,隨著二系橫向減振器阻尼的增加,其橫向平穩性指標也增大。因此,為了獲得好的橫向平穩性指標,要求二系橫向減振器取較小的阻尼值。根據計算,機車所需的二系橫向減振器的最佳阻尼值與機車運行速度有關:運行速度越高,最佳的減振器阻尼值越小。即機車的運行速度越高,為了獲得最佳橫向平穩性指標,其二系橫向減振器阻尼值應越小。
5 結語
利用SIMPACK可極大地簡化復雜多體系統的建模和分析難度。本文根據四軸電力機車的結構參數,利用SIMPACK軟件建立了機車的多體動力學模型,并對機車在標準軌道譜(美國5、6級線路譜)上的運行平穩性進行了計算分析。四軸電力機車在5級線路上運行時,其垂向平穩性指標在運行速度為60km/h以下時達到優良標準,在運行速度為70km/h、80km/h時達到良好標準(后司機室在80km/h時也能達到良好標準),在90~100km/h時達到合格標準。四軸電力機車在6級線路上運行時,其垂向平穩性指標在所有計算速度下均達到優良標準。
此外,筆者還利用模型分析了結構參數(包括一系橫縱垂向剛度,一系垂向減振器阻尼和二系橫縱向剛度,二系橫向減振器阻尼)對機車運行平穩性指標的具體影響。總之,應用SIMPACK對復雜機車多體系統建模,適當考慮結構的柔性,結合有限元-多體方法,可開發一個具備良好動力學特性的機車動力學模型,具有實際的工程和應用價值。
[1]洪嘉振.計算多體動力學[M].北京:高等教育出版社,2004.
[2]嚴雋耄.車輛工程[M].北京:中國鐵道出版社,2003.
[3]繆炳榮,方向華,傅秀通.SIMPACK動力學分析基礎教程[M].成都:西南交通大學出版社,2008.
[4]周勁松,任利惠,沈剛.高速列車運行平穩性研究[J].機械科學與技術,2003(6):901.
[5]陳澤深,王成國.鐵道車輛動力學與控制[M].北京:中國鐵道出版社,2004.
[6]TB/T 2360—1993 鐵道機車動力學性能試驗鑒定方法及評定標準[S].
猜你喜歡
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
當代陜西(2019年8期)2019-05-09 02:22:48
上海建材(2019年1期)2019-04-25 06:30:48
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
家庭影院技術(2018年4期)2018-05-09 07:07:52
專用汽車(2016年4期)2016-03-01 04:13:43
質量與標準化(2015年9期)2015-12-31 11:41:40
中國質量與標準導報(2014年4期)2014-03-11 19:54:25
中國質量與標準導報(2014年10期)2014-02-28 22:25:47
中國質量與標準導報(2014年7期)2014-02-28 22:24:39