基于元胞自動機的集裝箱碼頭前沿水平運輸模型研究
2012-01-23 01:35:04,
船海工程 2012年1期
關鍵詞:模型
,
(武漢理工大學 物流工程學院,武漢 430063)
集裝箱碼頭交通流系統是一個復雜的離散事件動態系統,過去的文獻資料對集裝箱碼頭交通系統建立的模型多為基于流程的離散事件動態系統仿真模型,側重對系統中事件的發生和運行進行控制和分析,集裝箱卡車(集卡)行駛一般被視作裝船、集箱等事件的組成部分,缺乏對其行駛方式的研究和模擬。元胞自動機(Cellular Automata,CA)是定義在一個由具有離散、有限狀態的元胞組成的元胞空間上,按照一定的局部規則,在離散的時間維度上演化的動力學模型,它是研究自組織化復雜系統的有效工具[1]。將一個集卡行駛車位視作單一元胞個體,該元胞周圍的車況可視為其相臨元胞的各自狀態。周圍元胞的狀態對選擇道路決策發生的影響充分體現了元胞自動機理論和車輛行駛特征的一致性。嘗試用復雜系統的元胞自動機建模方法對集裝箱碼頭前沿交通流系統進行更細致、深入的仿真建模和分析。
1 碼頭前沿交通流系統特性
1) 交通流僅由集卡構成,車輛類型單一。
2) 道路類型類似,且交叉路口沒有紅綠燈控制,基本上靠集卡司機自行判斷。
3) 集卡的運輸時間直接影響船舶在港時間和裝卸效率,進而影響到碼頭的服務質量,所以碼頭內的交通要盡可能的減少堵塞和排隊現象。
4) 交通流量比較有規律,大體上可以通過碼頭的吞吐量來判斷和估計。
5) 集卡的行駛速度為20~35 km/h[2]。
除此之外,集裝箱碼頭前沿經常設計成單方向行駛車道,因此集裝箱碼頭前沿的集卡流向更加容易預測。
在編制碼頭元胞模型時,簡化處理碼頭交通構成、集卡行駛速度等因素,而對車輛堵塞和排隊進行詳細的仿真分析。
2 碼頭前沿交通系統胞模型構建
2.1 元胞模型狀態設定
考慮集裝箱碼頭前沿道路的布局和集卡的行駛規律,將每個集卡行駛車位(即一個 “元胞”)的狀態抽象為4種。
狀態1(空閑等待)。目前為無車狀態,在周圍元胞狀態影響下,下一次的狀態可能進來車轉入有車狀態,也可能維持無車狀態。
狀態2(有車且該車無需換道)。目前車位上有一輛集卡,且其正前方不存在排隊或堵塞,無需換道。下一次該元胞的狀態可能因車輛向前移動轉為無車狀態,也可能因移入新車或者車輛前方各方向均擁堵形成排隊而維持有車狀態。
狀態3(有車且需向右轉)。目前車位上有一輛集卡,且正前方存在排隊擁堵,在右前方無車的情況下,下一步該車輛會轉向其右方相鄰車位(即其右上角的元胞轉為狀態2)。模型中車輛轉彎參考公路車輛轉彎規則,優先考慮車輛右轉。
狀態4(有車且需向左轉)。目前車位上有一輛集卡,且其正前方和右前方相鄰車位均存在擁堵現象,但其左前方車位無車的情況下,下一步該車輛會轉向其左邊的相鄰車道。狀態3和狀態4元胞的下一次狀態變化情況與狀態2元胞類似。
2.2 元胞狀態變化規則
每個元胞下一次狀態變化情況都受到周圍相鄰元胞的影響,本模型主要考慮單一元胞A0周圍相鄰的8個元胞A1、A2、A3、A4、A5、A6、A7、A8的狀態情況,其位置分布見圖1,設定其狀態分別為t1、t2、t3、t4、t5、t6、t7、t8。
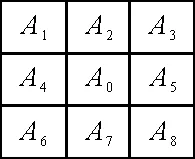
圖1 相鄰元胞位置分布
在道路上存在一些位置特殊的元胞,這些元胞相鄰的元胞有部分不存在,見圖2。

圖2 前沿道路特殊位置元胞分布
假定該圖表示一條4車道的前沿道路,標有字母的空格所在位置的元胞都有其特殊性。
1) 標有字母A的元胞前方不存在元胞,故前方不會存在車輛的占道和擁堵,故A1、A4、A6三個位置的元胞狀態永遠設定為狀態1(空閑等待)。
2) 標有字母B的元胞右方不存在元胞,故這些元胞無法向右轉向。其右方元胞視作永遠有車,即A1、A2、A3三個位置的元胞狀態永遠設定為狀態2(有車且無需換道)。
3) 標有字母C的元胞后方不存在元胞,故其后方永遠無車,A3、A5、A8三個位置的元胞狀態永遠設定為狀態1。
4) 標有字母D的元胞左方不存在元胞,故其左方元胞看作永遠有車狀態,即A6、A7、A8位置的元胞狀態設定為狀態2。
5) 標有AB、AD、BC、CD的四個點的情況分別為以上某兩種情況的綜合。AB處元胞A1、A2、A3三個位置狀態為2,A4、A6狀態為1。其它3個點周圍元胞狀態依次類推。
在已知元胞及其相鄰位置元胞的狀態值后,根據函數計算該元胞下一輪的狀態值,計算流程見圖3。每次循環計算出所有元胞的新狀態值后,即開始下一次循環,將每個元胞重新賦值。實現車輛的前進,轉向、排隊等行駛情況的仿真。
2.3 車輛換道規則設定
根據車輛跟馳理論,車隊中的每輛車必須與前車保持一定的間距以免發生碰撞,后車維持原車道或者換道的動機通常在于前方是否擁堵。造成自身若按照期望速度行駛會產生碰撞的危險,要實現換道必須滿足兩個前提條件:①換道動機,即本車是不是想換道;②安全條件,即如果本車要換道,對自身以及其它車輛是不是安全的[3]。

圖3 元胞狀態賦值流程
假定本車所在車道為M,車道相鄰左車道為L,車道相鄰右車道為R,基于以上理論設定車輛換道規則如下。
1) M→M(不換道)狀態要求。 ①t0=2或t0=3或t0=4。元胞處于該狀態時,表示該元胞所代表的車位上存在車輛,且該車輛下一步行駛目標確定。下一次賦予狀態時,若無車輛進入則其狀態必定為狀態1,若有車輛進入,則不論該車輛是從正后方車道而來,還是從后側方車道轉向而來,都賦予其狀態2;②t0=1且不滿足換道條件。當①和②之一被滿足時,車輛無需換道。
2) M→R(向右換道)狀態要求。①t0=1,t6=1,t7=2,t8=2;②t0=1,t6=2,t7=2,t8=2。元胞處于這兩種狀態時,A3位置元胞前方存在擁堵需要轉向,而A0位置元胞狀態為1,可以轉入車輛。因為優先考慮向右換道,故此時滿足向右換道條件。
3) M→L(向左換道)狀態要求。不滿足向右換道條件且滿足①t0=1,t1=1,t2=2,t3=2;或者②t0=1,t1=2,t2=2,t3=2。處于這兩種狀態的元胞可向左換道,原理類似向右換道規則。
3 仿真結果分析
3.1 兩種模型在車輛密集情況下對車輛自組織現象模擬情況對比
基于流程的離散事件動態系統仿真模型對集卡行駛規律的模擬相對簡單,基本規則為:車輛按指定車道向前行駛,前方車道存在車輛堵塞道路則進行排隊。排隊車輛數目超過道路車輛容納能力后,新來車輛向相鄰車道換道行駛,原路堵塞消失時排隊車輛繼續向前行駛,否則持續排隊。該規則忽略了駕駛員的主動性,造成一些不必要的排隊等待時間,而基于元胞自動機理論的模型能對該問題進行較好的修正。
用某隨機數流來模擬進入碼頭前沿道路的集卡數量,對元胞模型和傳統模型進行對比仿真試驗。運行相同時間后,兩種模型中各個車道上車輛的分布數量情況見表1。

表1 碼頭前沿道路集卡分布 輛
可以看出,元胞模型在車輛較擁堵的狀況下對集卡自組織特性進行了較好的模擬,集卡在道路上分布較傳統模型均勻。圖4a)、b)分別為元胞自動機模型和傳統模型中,碼頭前沿道路各車道上的集卡分布數量。
3.2 兩種模型在作業條件相同的情況下前沿車輛吞吐量統計對比
由于元胞自動機模型在仿真實驗中較傳統模型減少了不必要的排隊和堵車現象,故在相同的外界條件下,同樣的時間內,元胞自動機模型中的碼頭前沿吞吐量統計值應該更接近實際值。本文建立的模型為天津港某集裝箱碼頭的道路交通仿真分析模型,該碼頭岸線總長度1 400 m,縱深約1 000 m,岸邊配置15臺岸橋,軌距35 m。兩種不同模型以及實際情況在相同的時間段通過相同碼頭前沿道路的總集卡數量統計見表2。

圖4 碼頭前沿集卡分布
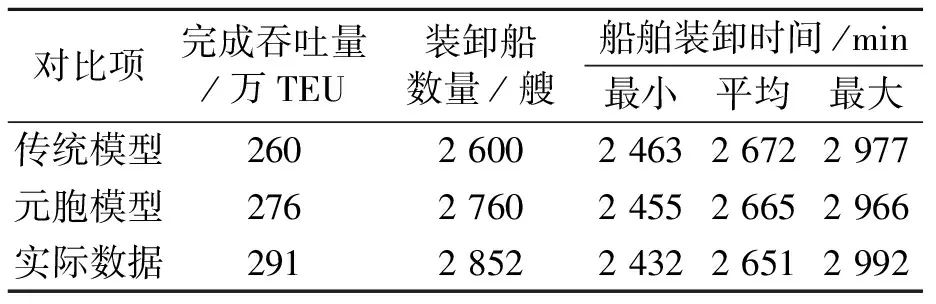
表2 完成吞吐量和完成裝卸數量統計
由表2可見,運用元胞自動機模型在集裝箱碼頭前沿吞吐量數據統計方面,能夠仿真出更接近現實生產數據的結果。
4 結論
運用元胞自動機理論能夠建立對集卡行駛路徑和行駛規則模擬更貼合實際的集裝箱碼頭交通系統模型。在計算機仿真技術高速發展的今天,這種新型模型能夠滿足仿真建模結果更精確的現實要求。
由于依據元胞自動機理論建立的仿真模型對交通流模擬的精確程度較傳統模型高,狀態的刷新和重新賦值過程較復雜,導致了程序的數據處理速度較傳統模型有所減緩,進行仿真模擬實驗需要較長的運行時間。因此,對模型結構進行優化,減少冗余的數據運算,使其運行速度合理提升是建立元胞自動機模型需要考慮和注意的問題。
[1] 賈 斌,高自友,李克平,等.基于元胞自動機的交通系統建模與模擬[M].北京:科學出版社,2007.
[2] 肖矯矯.集裝箱碼頭路網交通研究[D].武漢:武漢理工大學,2006.
[3] 李 江.交通工程學[M].北京:人民交通出版社,2002.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
