基于容柵傳感器的試件拉伸率在線測量裝置
2012-02-01 03:34:02金定洲張念生
物理實驗 2012年7期
金定洲,張念生
(安徽農業大學工學院,安徽合肥230036)
1 引 言
在做拉伸實驗時往往使用卡尺等機械測量工具對拉斷試件進行長度測量,而由于一些客觀因素的存在使得測量數據的精度大大降低,如:拉斷試件測量時不好固定;試件斷開后有回彈塑性變形現象;斷口無法緊密對接,等等.為此本文設計了一套可以安裝在拉伸試驗機上進行在線同步測量裝置,并且在拉斷試件的瞬間保持測量度數不變,有效地解決了試件回彈塑性變形現象影響測量精度的問題,從而將以上這些問題都得以解決.
2 硬件電路設計
硬件電路部分包括:電平轉換電路、數據采集電路、中斷產生電路以及數據顯示電路.由于單片機與液晶1602的連接電路比較常見,本文不做詳細介紹.
2.1 原理介紹
要實現自動測量必須用到位移傳感器,目前常見的長度測量位移傳感器有光柵、容柵、磁柵等,而目前廣泛應用在長度測量器具上的是容柵傳感器,如容柵數顯卡尺、千分尺等.
容柵傳感器由動柵、定柵和顯示電路組成,如圖1將定柵固定安裝在拉伸試驗機上臂固定不動,動柵(含顯示電路)安裝在拉伸試驗機下臂上,當試件拉伸時動柵隨之移動產生位移信號.如果僅利用傳感器動柵上的顯示電路讀取位移信號則試件拉斷時將繼續產生位移信號,故無法計算伸長率.本裝置是通過單片機對傳感器信號做進一步處理,即同步讀取容柵傳感器的位移信號,經過處理以后送到1602液晶獨立顯示位移值,當試件拉斷的瞬間,由硬件電路產生外部中斷信號給單片機,單片機即停止讀取傳感器數據并保持當前數據.此時動柵雖然繼續向下移動產生位移信號,但是單片機的讀數不會發生改變.

圖1 容柵安裝示意圖
2.2 中斷信號產生電路
如圖2所示,5V電源通過電阻R、拉伸試件與電源地相連(注意安裝時拉伸試件必須與試驗機夾具保持絕緣),拉伸試件上端通過非門接至單片機P3.3端口,試件未拉斷時P3.3為高電平,當試件拉斷時P3.3電平由高變低,給單片機產生中斷信號.

圖2 中斷產生電路
2.3 容柵傳感器電平轉換電路
因為容柵傳感器采用1.5V電壓供電[1],而單片機工作電壓為5V,所以要使兩者之間能夠通信,必須進行電平轉換,本電路采用LM311電壓比較器來實現此功能.LM311為高性能電壓比較器,可單電源或雙電源供電,輸入可以是與系統地隔離的信號,輸出可以是以地或VCC或VEE為參考的負載,驅動方式靈活,驅動電流大,線路簡單可靠.如圖3所示,容柵傳感器數據輸出端口Data和時鐘輸出端口CLK分別接到2個LM311的同相輸入端2腳,反向輸入端3腳接基準電壓,根據比較器的特性:當Data大于基準電壓時輸出+5V,當Data小于基準電壓時輸出0V.從而完成容柵傳感器電平轉換.

圖3 電平轉換電路
2.4 容柵傳感器數據采集電路
由于容柵傳感器采用串行數據傳輸方式,輸出的時鐘頻率為150kHz,2幀數據之間為低電平[2].其時序圖如圖4所示,每幀數據分為2組,當CLK從低電平到持續50μs高電平時表示開始傳輸數據,緊接著傳輸24位絕對零點數據(絕對零點到測試點之間距離),CLK再持續110μs高電平,緊接著傳輸24位相對零點數據(相對零點到測試點之間距離),再輸出65μs高電平結束數據傳輸.每組24位數據采用二進制編碼,低位在前,高位在后,最高位為符號位,“0”表示正數,以原碼輸出,“1”表示負數,以補碼輸出.每幀數據之間有350ms持續低電平.正因為每幀數據之間有350ms的持續低電平,所以本裝置的數據采集采用外部中斷0設置成低電平中斷方式,在中斷中完成對數據的采集、數據處理與顯示.
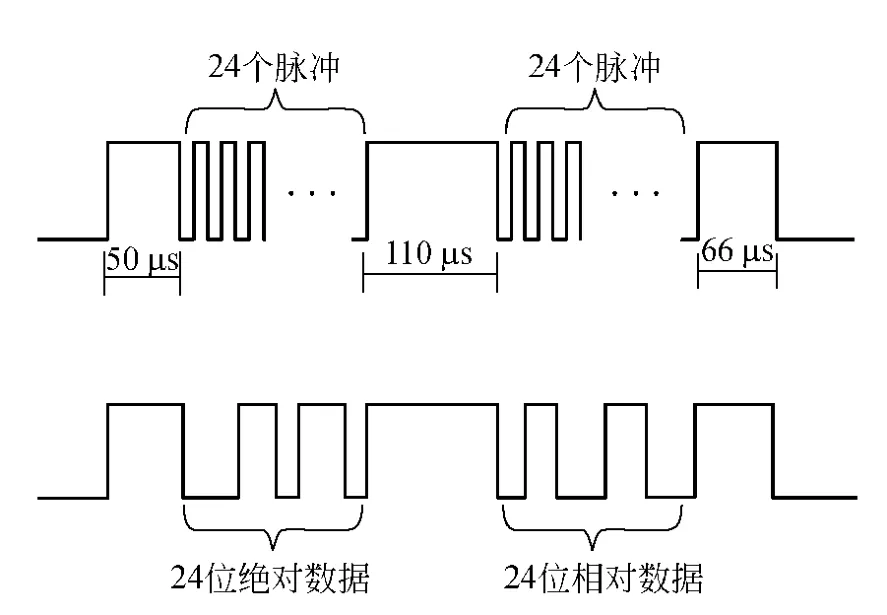
圖4 容柵傳感器時序
由于單片機端口為8位,所以要采集24位數據必須利用鎖存器將24位串行數據轉換成并行數據,再分3次讀取鎖存器的數據存放于單片機內,再進行數據處理.具體的數據采集電路如圖5所示.

圖5 數據采集電路
串并轉換使用了3片74HC164,數據信號Data1送人74HC164輸入端AB口,CLK1接至每片74HC164的時鐘輸入端.鎖存器采用74HC373,其中74HC373的輸出使能端OE分別接單片機P1.0,P1.2,P1.3口,鎖存使能端LE都接至P3.0口.當拉伸試件斷裂時(如圖2所示)P3.3口變低電平產生中斷,中斷程序使P3.0口置低電平封鎖容柵時鐘和鎖存鎖存器,從而使顯示讀數保持在當前狀態不變.
3 軟件設計
軟件部分主要包括主程序(如圖6)、中斷子程序(如圖7)、延時子程序、數據采集處理和顯示子程序.

圖6 主程序流程

圖7 中斷程序流程
在主程序內完成對定時器、中斷、1602液晶的初始化;數據采集子程序分3次讀取鎖存器的內容存放在1個8位數組中;然后通過數據處理子程序首先對24位二進制數據的正負進行判斷,如果是負數則要進行補碼轉換,再將24位二進制數據進行二—十進制轉換,轉換后的十進制數S與測量長度L(單位mm)之間的關系可通過下面公式[3]換算:

再通過顯示子程序使轉換后的測量長度L顯示在1602液晶上.
采用低電平中斷時,判斷數據幀開始時刻很重要,因為每幀數據之間有350ms的持續低電平,所以進入中斷后如果數據幀還沒開始發送很可能是采集不到數據,中斷程序中采用了while(!CLK)語句,(//sbit CLK=P3.2)當P3.2口在350ms低電平中時中斷子程序一直等待,只有當低電平走完跳變到高電平時再啟動延時、采樣數據,其中的延時子程序,主要是為了采集相對零點數據.容柵傳感器上有復位按鈕,當按下復位按鈕時相對數據清零,絕對數據保持不變,所以裝置安裝時不必考慮零點位置,任何時候按下復位按鈕就可以測量拉伸長度.
4 試驗數據
表1是試件拉斷后由人工對接斷口后測量的數據值l人與在線測量裝置自動測量的數據值l自對比,標距長為l.通過數據分析可以發現該裝置可以有效地解決由于斷口對接不緊密而造成的測量數據偏大的問題.通過軟件設置顯示測量值有效數字位數可滿足不同場合對測量精度的需求.
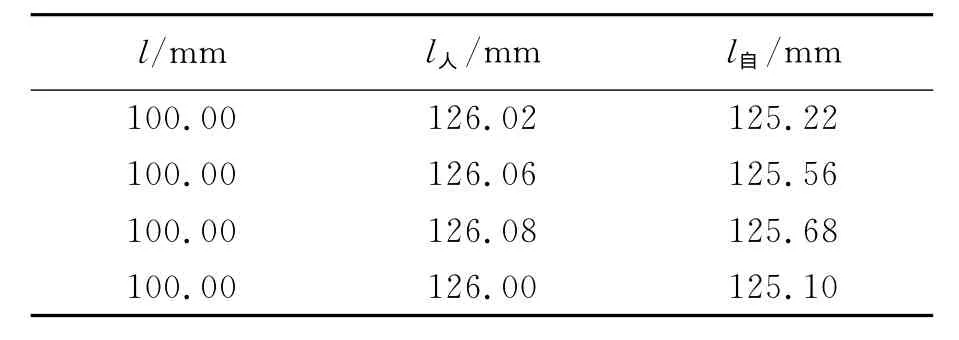
表1 實驗數據對比
5 結束語
該裝置成本低、制作簡單、安裝方便、使用效率高,根據測量需要可以設置更高的測量精度.現已經安裝在我院拉伸試驗機上供學生實驗時使用,通過一段時間的觀察試驗,數據穩定可靠,該裝置大大提高了實驗的效率與實驗數據的精度,達到了預期的效果.另外該裝置可移植性強,把它安裝在機械加工裝置上可實現對數據的實時測量,提高加工效率.
[1] 王安敏,王辛立,崔偉,等.基于AT89C52單片機的容柵傳感器測距系統[J].儀表技術與傳感器,2008(9):86-88,90.
[2] 楊雪鋒,李威,潘寧.基于P89LPC932A1容柵傳感器智能接口的設計[J].煤礦機械,2005(9):6-8.
[3] 楊邵鵬,汪地,董峰,等.容柵尺和單片機的接口研究[J].計量與測試技術,2009,36(12):46-47.
[4] 丁元杰.單片微機原理及應用[M].北京:機械工業出版社,1999.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年12期)2018-08-01 00:48:04
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電子制作(2017年19期)2017-02-02 07:08:27
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
