尺度因子自適應的UKF算法在目標跟蹤中的應用
2012-02-03 06:29:08侯建華笪邦友馬曉路
中南民族大學學報(自然科學版) 2012年2期
關鍵詞:卡爾曼濾波
侯建華,劉 倩,笪邦友,馬曉路
(中南民族大學電子信息工程學院,武漢430074)
在目標跟蹤領域,當系統的狀態方程和觀測方程是線性時,普通的卡爾曼濾波可以達到較好的跟蹤效果[1].而在實際應用中,現實背景復雜多變,導致系統方程或觀測方程往往是非線性的,因此若采用線性的卡爾曼濾波跟蹤,就會變得不穩定甚至發散,導致跟蹤失敗.傳統的解決非線性估計問題的方法是采用擴展卡爾曼濾波器,1995年,Baumberg等提出了基于擴展卡爾曼濾波(EKF)的跟蹤方法[2].該算法是對非線性的系統方程或觀測方程進行泰勒展開,取其一階近似項,這種把非線性問題線性化的處理會不可避免地引入線性化誤差,此外,系統方程或觀測方程的Jacobian矩陣計算非常復雜、耗時,影響整個算法的實時性.為了解決此問題,Julier等提出了用Unscented卡爾曼濾波器來解決非線性濾波的問題[3].Unscented卡爾曼濾波的核心部分是Unscented變換,它采用一組精心選擇的加權采樣點(Sigma)來表達系統的統計特性,這些采樣根據真正的非線性方程進化而無需將其線性化.研究表明,UKF 算法與 EKF 算法[4,5]相比,能夠為卡爾曼濾波器提供更好的非線性均值和方差近似解,對系統狀態的估計精度和穩定性都有不同程度的提高.
本文在傳統UKF對稱采樣策略的基礎上,引入了比例修正框架[6]以保證協方差的半正定性,減少非局部效應的發生.此外,UKF采樣過程中,傳統的設定尺度因子的方法是根據實時的環境人工的調整尺度因子α,以得到最優經驗值.為了提高UKF跟蹤算法的實際應用性和智能性,有必要研究一種更優的自適應的尺度因子調整方法.因此,本文將一種尺度因子自適應的UKF算法應用于不同場景的目標跟蹤中,實驗證明該算法具有很好的跟蹤性能和實用性.
1 Unscented變換
Unscented變換是計算非線性變換的隨機變量的統計特征的一種新方法,它使用一組適當選擇的帶權重的離散采樣點(Sigma點)來表征系統狀態概率密度的均值和方差.U具體實現步驟是:把被估計的狀態視為一個隨機變量,在原先狀態分布中按照某種采樣策略[7]采樣一些點,使這些點的均值和協方差與原狀態分布中的均值和協方差相同,然后將非線性變換作用于每一個采樣,得到相應的函數值點集,再求取這些點集的均值和方差,最后通過觀測值調節樣本點的位置,使采樣點集的均值和方差以二階精度逼近原狀態的均值和方差.
假設n是隨機變量x的維數,x的均值為ˉx,協方差為Px,y=f(x)是一個非線性函數,通過Unscented變換估計隨機變量y的均值和協方差的過程如下[8,9].
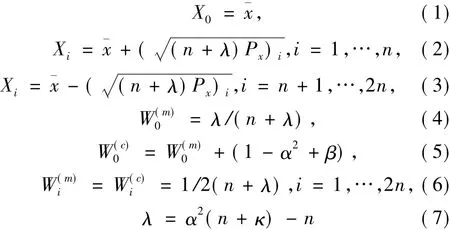
(1)根據以下方程確定一組隨機采樣點Xi和采樣點所對應的均值權值W(tm)和方差權值W(ic):其中κ是自由參數,用來捕捉給定分布的高階矩信息,一般對于高斯分布,考慮到4階矩的統計量,通常取n+κ=3.α是尺度因子,控制采樣點和均值ˉx之間的距離.β是用于考慮分布的先驗知識[10],通常取是矩陣平方根的第i列.
(2)根據非線性變換Yi=f(Xi)計算隨機變量Yi的采樣.
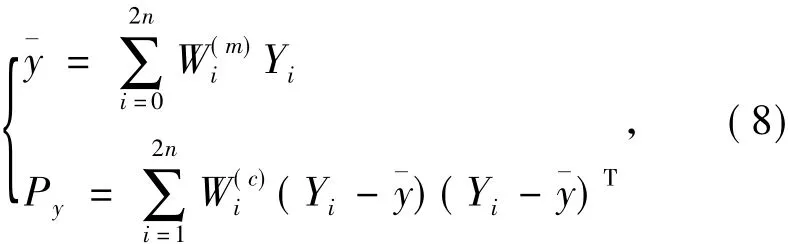
(3)計算隨機變量Yi的均值和協方差:這里列出的Unscented變換是采用對稱采樣策略,文獻[6]證明y均值的計算精度可以精確到三階,對于協方差的精度可以精確到二階.在利用公式(5)求權值時加入了比例修正(1-α2+β),確保輸出y的協方差的半正定性[11].在目標跟蹤算法中,就是用這些離散采樣點來表征目標狀態的.
2 尺度因子α的自適應方法
文獻[3]證明可以通過調整尺度因子α的值來控制采樣點到中心點的距離di,在對稱采樣方式下的該距離越遠相應的采樣點的參考價值就越小,即會產生非局部效應.在仿真實驗時可以通過對α取不同的值,從中選擇最優的值以達到最好的跟蹤效果.但在實時環境中,不允許嘗試,必須給出一個具體的尺度因子的取值方案.所以,參考文獻[12],本文將尺度因子α隨環境自適應變化的算法應用于UKF的目標跟蹤.
假設t時刻的UKF濾波值為x^t/t,真實值為xt/t,而由公式(9)可知,Pt/t表征了預測值與真實值的關系(也就是誤差),可以近似的計算出x^t/t與xt/t之間的距離dt/t,為了方便計算,利用公式(10)近似計算dt/t:

這種方法的基本思路就是用第k步的濾波值近似覆蓋真值的鄰域O(^xt/t,dt/t),此作為第t+1樣范圍,使Sigma點(采樣點)到中心點的距離di不超過dt/t,即令:

利用公式(11)求出的 αt+1/t,重新采樣生成Sigma點和相應的權值,完成相應的更新.這樣循環的更新的 α值,就可以得到尺度因子自適應的Unscented變換.
3 UKF對跟蹤系統的建模
UKF是在普通卡爾曼濾波的框架上,將Unscented變換分別應用于均值和協方差的求解,并不斷遞推,就可得到UKF非線性濾波器.
考慮一般的目標跟蹤問題,目標的狀態方程和觀測方程分別為:
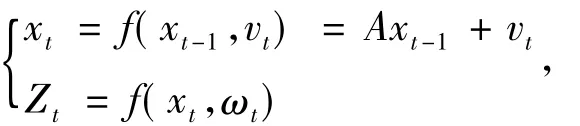
其中A為表征運動模型的參數,xt表示t時刻系統的狀態向量,zt為時刻的觀測向量,vt為系統噪聲,ωt為觀測噪聲.
本文UKF濾波過程的實現步驟如下:
1)初始化,根據初始狀態變量x得到均值^x和協方差P0.
2)計算2n+1個加權Sigma點xi(t-1/t-1)來表征系統的狀態分布(其中i=0,1,…,2n,是狀態向量的維數):
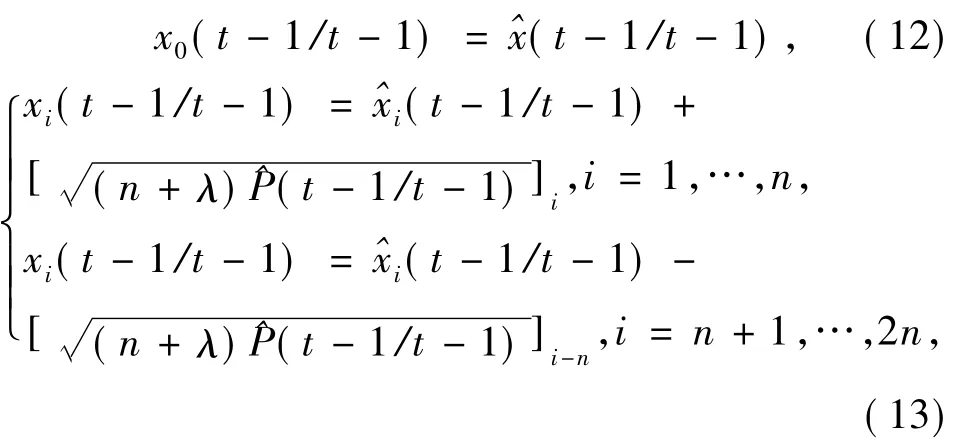
得到采樣點集xi(t-1/t-1);根據公式(9)~(11)更新α;最后將更新的αt+1/t代入公式(4)~(7)計算相應的權值W(m)i,W(c)i.
3)預測.由系統狀態方程和觀測方程對各個采樣的Sigma點集里的每個采樣點進行非線性變換,得到變換后的Sigma點集:

計算預測的狀態均值和協方差:
4)觀測更新.計算觀測均值、自相關函數和觀測的互相關函數:
計算狀態更新的濾波增益:

狀態更新后的濾波值:

狀態后驗概率方差陣:

若繼續跟蹤t=t+1,轉(2);否則結束.
4 仿真方案
為了驗證尺度因子自適應的UKF跟蹤算法的效果,分別對傳統的UKF算法和自適應的UKF算法進行了仿真,并對新算法的實用性進行了測試.
4.1 算法的自適應性驗證
4.1.1 仿真條件
在二維直角坐標系中,假設目標做勻速運動,取目標的位置和速度為系統的狀態變量,即→x=[x,y,vx,vy],x和y表示目標中心點的坐標,vx,vy分別表示x,y的導數,即速度.觀測向量zt的兩個分量分別表示t時刻目標中心處的斜距和方位角,xct和yct分別表示t時刻目標中心處的觀測值.vt是從傳感器得到的噪聲,ωt是從觀測樣本得到的噪聲(仿真時加入隨機噪聲以模擬復雜環境).具體仿真條件如下:
初始狀態向量→x0=[15000,30,15000,30],Δt=10是采樣間隔.
4.1.2 仿真結果與分析
首先對標準的UKF算法進行仿真,分別取α為0.1,0.3,0.5,0.8,1(其中 α=1 是為最優經驗值).其次,對本文提出的尺度因子α自適應的UKF算法進行仿真.
實驗結果如表1.表1中真值與UKF濾波值的誤差比公式為:

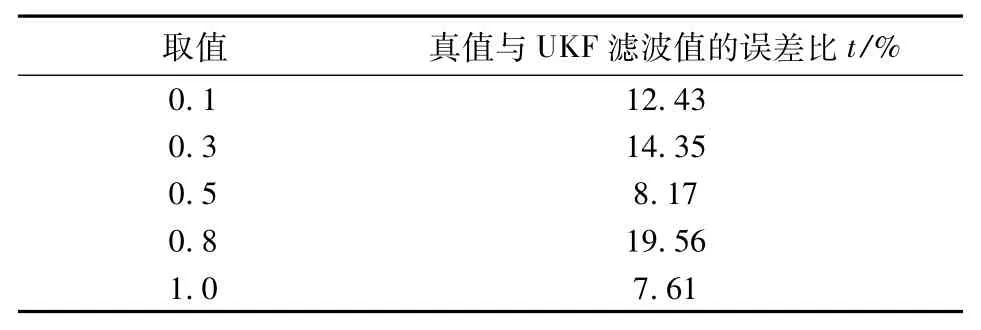
表1 不同α下的跟蹤精度Tab.1 Tracking performance with difference α
從表1可以看出,尺度因子α的不同取值時對跟蹤精度有很大的影響,濾波精度有明顯的差異,因此實際應用時需要人工反復調節α的大小以獲得最優值(α=1),使真值和濾波值的差異最小.此操作復雜,智能性和實用性不高.
圖1(a)和圖1(b)對比可知,尺度因子α自適應的UKF算法能夠取得和最優經驗值(α=1)時的UKF算法基本相同的跟蹤精度.
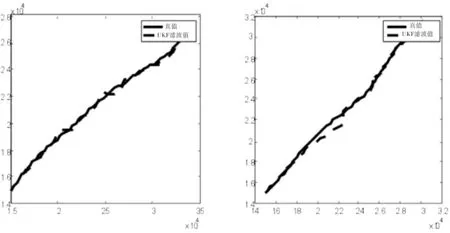
圖1 不同α下的跟蹤精度Fig.1 Tracking performance with difference α
4.2 算法的實用性驗證
4.2.1 實驗條件
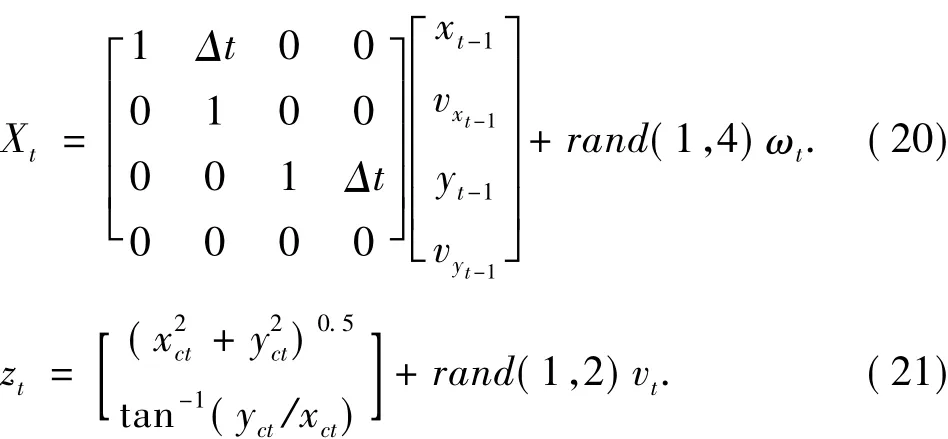
為了測試本文算法的實用性和智能性,本文分別對動態背景下的行人行走視頻(實驗一)和多干擾復雜環境下的車輛行駛視頻(實驗二)進行試驗,并將仿真結果與卡爾曼濾波的跟蹤算法進行對比.兩組實驗的狀態向量設置為二維空間的目標的位置、速度,即→x=[x,y,vx,vy],狀態初始值由手動選取目標區域完成,考慮到實時視頻任意相鄰兩幀幀差為幾十毫秒,目標速度基本不會發生變化,所以設置系統運動模型為勻速即狀態轉移矩陣:
A=[1,1,0,0;0,1,0,0;0,0,1,1;0,0,0,1]T,觀測模型參數為t時刻目標中心處的斜距和方位角,如公式(21),系統噪聲和觀測噪聲均調到最佳.
4.2.1 實驗結果與分析
如圖2所示,本組實驗是在視頻第三幀時,人工的選取要跟蹤的目標(也就是確定初始狀態值),黑色矩形框是目標的跟蹤框.視頻中的樹木和其他行人構成了變化的背景,地面顏色與選定的目標人物上衣顏色相仿,圖2(a)~(c)中,由于動態背景和周圍雜物的影響,普通的卡爾曼跟蹤算法在第30幀時跟蹤框已經逐漸偏離目標,在第60幀時已經無法對目標進行跟蹤.而圖2(d)~(f)(本文算法實驗結果)具有明顯的優勢,在動態背景環境下,本文算法卻仍然能夠穩定地跟蹤目標.
(1)普通卡爾曼濾波進行人體跟蹤結果如圖2(a)~(c);本文算法進行人體跟蹤結果如圖2(d)~(f).
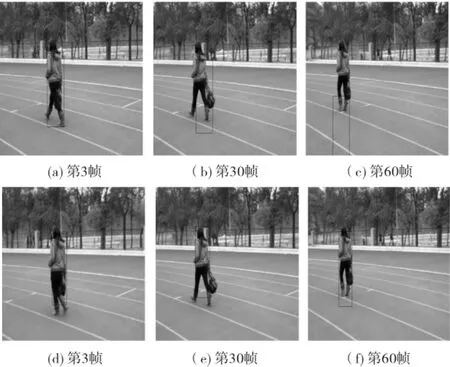
圖2 卡爾曼濾波和本文算法的比較Fig.2 Comparisons between Kalman filter and improved UKF
(2)普通卡爾曼濾波進行交通車輛跟蹤結果如圖3(a)~(c);本文算法進行交通車輛跟蹤跟蹤結果如圖3(d)~(f).
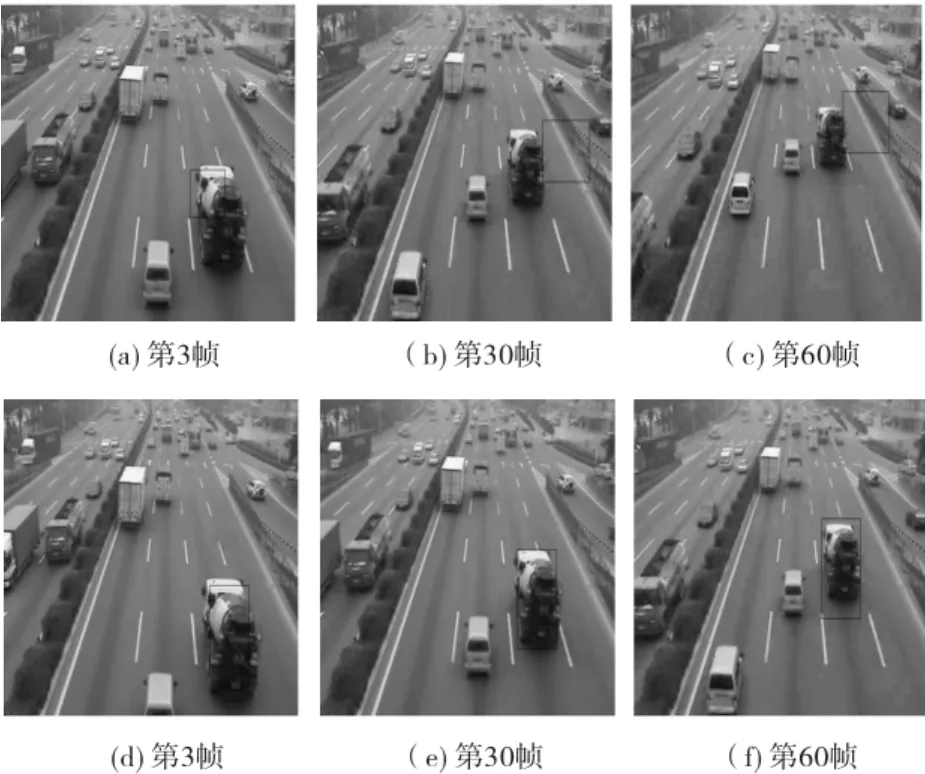
圖3 卡爾曼濾波和本文算法的比較Fig.3 Comparison between Kalman filter and improved UKF
圖3是普通卡爾曼濾波和本文算法用于監測交通車輛的實驗結果,初始狀態也是通過人工選取,即圖3(a)中的第5幀和圖3(d)中的第2幀中黑色矩形框選定的卡車.視頻中其他來往的車輛構成復雜的非線性背景.實驗表明,在復雜的非線性環境下,普通卡爾曼算法不能達到跟蹤的目的,如圖3(b)所示,在視頻第10幀時黑色跟蹤框已經偏離目標,基本上失去了跟蹤的意義.而本文算法如圖3(f)所示,可以一直很穩定的對目標進行跟蹤,具有很好的跟蹤效果.
綜合圖2和圖3可以看出,不同場景條件下,不用人為的調節尺度因子,本文算法都具有很好的跟蹤效果,自適應能力很強,實用性很好.
5 結語
本文提出的尺度因子自適應的UKF跟蹤算法能夠取得和最優經驗值條件下的普通UKF算法大致相同的精度;在不同的實際環境下都能取得理想的跟蹤效果,提高了非線性濾波的實時跟蹤能力和濾波的數值穩定性,具有非常好的實用價值.
[1]付東莉,柴 毅.基于滾動時域估計的帶約束運動目標跟蹤[J].計算機應用研究,2011,28(3):1-3.
[2]Baumberg A,Hogg D C.Learning spatiotemporalmodels from training exemples[C]//Proc.British Machine Vision Conference.Birmingham:Proc,1995:45-74.
[3]Simon J.Julier,Jeffrey K.unlmann.A new extension of the kalman filter to nonlinear systems[C]//Proc.The 11th International Symposium on Automatic Control,Aerosense:Proc,2000,21(45):447-482.
[4]Zhu Anfu,Jing Zhanrong.UKF and its application to target tracking[J].Fire Control and Command Control,2008,33(8):2-3.
[5]Mathicu ST-Pierre,Denis Gingars Dr Ing.Comparison between the unscented kalman filter and the extended kalman filter for the position estimation module of an intergrated navigation information system[J].IEEE Intelligent Vehicles Symposium University of Parma,2004,34(7):832-834.
[6]Julier S,Unlmann J,DurrantWhf.A new method for the nonlinear transformation ofmeans and covariance in filters and estimators[J].IEEE Transactions on Automatic Control,2000,45(3):477-482.
[7]劉 錚.UKF算法及其改進算法的研究[D].長沙:中南大學,2009:25-28.
[8]Julier S J,Uhlmann JK.Reduced sigma point filters for the propa-gation of means and covariance through nonlinear transformations[C].//Proc.American Control Conf.Jefferson:Proc,2002:887-892.
[9]Yong Rui,Chen Yunqiang.Better proposal distributions:object tracking using unscented particle filter[J].Computer Vision and Pattern Recognition,2001,10(21):47-51.
[10]MOSHE BEN-ALIVA.Nonliner kalman filtering algorithms for on-line calibration of dynamic traffic assignmentsmodels[J].IEEE Transaction on Intelligent Transportation Systems,2007,8(4):664-665.
[11]Julie S J.The scaled unscented transformation[C]//Proc.American Control Conf.Jefferson:Proc,2002:4555-4559.
[12]Jiang Weinan,Zhou Haiyin.Self-adaptive selectingmethod for scaling factor of scaled unscented transformation[J].Chinese Space Science and Technology,2008,6(3):3-5.
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
