可快速充電的安防機器人
2012-02-23 02:02:16呂寧一曹沛晴
科技創新與品牌 2012年2期
呂寧一 曹沛晴

隨著科技的進步與生活水平的提高,人們對生活和工作環境的安全性與舒適性提出了更高的要求。對于危險災難而言,“防患”的意義大于“救災”,如何能夠及時發現危險,合理預防;同時又能盡量不打擾人們正常的生活,做到“人性化”防患,是需要研究人員認真思考的一個重要問題。我們在老師的指導下,利用自己所學的知識,設計了一種電動安防機器人(主要功能為火災預警),它以車載電源為動力,用電機進行驅動,能夠對特定區域進行安全巡檢并能根據檢測的情況采取相應的措施。
電動安防機器人能夠“默默無聞”地守護在我們身邊,有效地提高我們的工作和生活質量。但如果把充電電池作為安防機器人的儲能元件,亟需解決的一個重要問題就是電池的快速充電。針對亟需解決的問題,我們又設計了安防機器人的快速充電裝置,實現了以超級電容器為儲能元件的能夠快速充電的安防機器人演示系統。
我們通過改裝工作電壓為4.8V的玩具電動車來制作安防機器人的移動底盤,選擇兩個容量為150F、電壓為2.7V的SU0150E-0027V-1CA單體電容器串聯后作為電源。兩個超級電容器串聯后的最高電壓將達到5.4,可以滿足玩具電動車4.8V的電壓要求。
為實時監測超級電容器在充電或機器人運行過程中的電壓和容量,我們設計和加工了一個LED電壓指示燈,超級電容器的電壓與容量成正比,所以LED電壓指示器是根據超級電容器的工作電壓設計和制作的(如圖1)。電容器的電壓是5.4V,所以LED電壓指示器用5個發光二極管進行顯示,另用五個普通二極管分別與發光二極管相連,因為紅色發光二極管的導通電壓是1.8V,所以只要電壓在1.8V基礎上增加0.6~0.7V,第一個發光二極管就會慢慢亮起,以后電壓每上升0.6~0.7V,就會有一個發光二極管亮起,若5個全亮,說明電壓達到4.8~5.3V,電容器完成充電。
電動安防機器人主要由電源模塊、電機驅動模塊、傳感器模塊、單片機控制器模塊、轉向舵機等組成(如圖2)。
電源分兩部分,一是為機器人的控制電路提供電力,二是為驅動電機提供電力;電機驅動采用一片L293D芯片,該芯片內部集成兩個H橋;傳感器是為了讓安防機器人能夠沿既定巡檢軌跡行駛,我們將黑色導引線(即車道線)設置在白色的地板上的方式實現這一任務;單片機控制器為機器人的大腦,是由一個飛思卡爾單片機為主的控制器;轉向舵機主要收發主控制器發來的信號,進而控制前輪轉向。
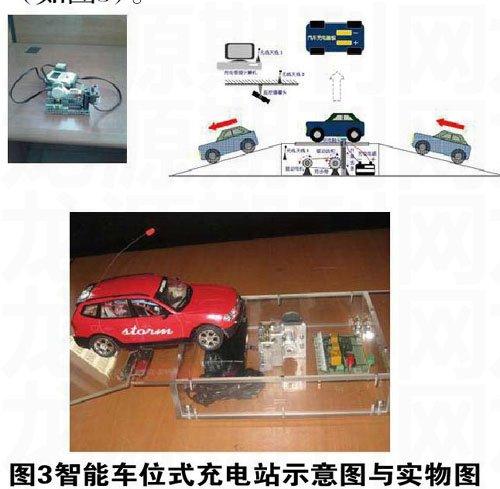
為實現安防機器人的自動充電,我們設計了一個智能車位式充電站。該充電站與停車位合二為一,主要有充電觸頭、觸頭升降機構、驅動電機、測距傳感器、微動開關、車位指示燈、大電流AD/DC轉換器、車位充電控制器組成(如圖3)。
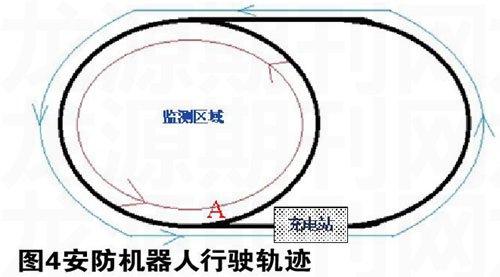
安防機器人能夠進行火災安全巡檢、自動預警、自動檢測電壓、自動充電。在電力充沛的情況下,機器人為安全巡檢模式,沿內環道(即紅色軌跡)巡檢行駛,在行駛過程中自動檢測紅外熱量傳感器一級超級電容電壓;在電力不足的情況下,機器人切換為充電模式,沿外環道(即藍色軌跡)進入充電站進行充電并實時檢測充電電壓。當電力充足時,機器人又回到安全巡檢模式,沿內環道行駛檢測(如圖4)。
本項目的研究設計,可以有效解決工作在特定區域范圍內的機器人工作連續性問題,也許還可以用在城市電動汽車的現場快速充電方面,對機器人以及電動汽車的普及和推廣具有參考價值。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年12期)2018-08-01 00:48:04
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年19期)2017-02-02 07:08:27