HILS技術(shù)在水雷控制系統(tǒng)設(shè)計(jì)中的應(yīng)用
2012-03-07 06:22:56蔣平陸曉明
艦船科學(xué)技術(shù) 2012年7期
關(guān)鍵詞:系統(tǒng)
蔣平,陸曉明
(中國(guó)船舶重工集團(tuán)公司第七一○研究所,湖北宜昌 443003)
0 引言
隨著微機(jī)技術(shù)的發(fā)展和現(xiàn)代控制理論的進(jìn)步,水中兵器發(fā)展到了一個(gè)新的階段,具備遠(yuǎn)程打擊、精確制導(dǎo)能力的武器才能成為佼佼者。水雷作為具有戰(zhàn)略威懾的水中兵器,有著極其重要的地位。然而,傳統(tǒng)的水雷,其“守株待兔”的作戰(zhàn)方式已經(jīng)跟不上現(xiàn)代戰(zhàn)爭(zhēng)的腳步,新一代水雷武器的研制正朝著高機(jī)動(dòng)性、精確打擊、不受水深限制、布放方式多樣化的方向發(fā)展。作為水雷總體技術(shù)中的核心部分,水雷的控制系統(tǒng)無(wú)疑有著重要的地位,其主要功能是根據(jù)水雷航行與攻擊過(guò)程中的彈道要求控制彈體,使其按規(guī)定的彈道運(yùn)動(dòng),無(wú)論是攻擊的快速性、精確性或者是隱蔽性、抗干擾性,都跟控制系統(tǒng)的效能息息相關(guān)。
半實(shí)物仿真(Hardware in the loop simulation,HILS)指在整個(gè)仿真回路中包含一部分硬件的仿真。與傳統(tǒng)的純數(shù)學(xué)仿真相比,HILS在其整個(gè)系統(tǒng)中接入了一部分實(shí)物,因此仿真結(jié)果往往具有很高的置信度;同時(shí),由于部分真實(shí)的設(shè)備、產(chǎn)品參與了整個(gè)仿真過(guò)程,這也有助于對(duì)這部分硬件進(jìn)行性能考察,從而使部件能在滿(mǎn)足系統(tǒng)整體性能指標(biāo)的環(huán)境中得到檢驗(yàn)。對(duì)水雷控制系統(tǒng)進(jìn)行半實(shí)物仿真,全面評(píng)價(jià)水雷彈體控制特性,可為水雷控制系統(tǒng)設(shè)計(jì)及評(píng)價(jià)提供有力的依據(jù),可有效提高系統(tǒng)設(shè)計(jì)的可靠性和研制質(zhì)量,降低系統(tǒng)的研制周期和研制經(jīng)費(fèi)。
1 水雷控制系統(tǒng)基本組成
隨著精確制導(dǎo)等性能的要求越來(lái)越高,水雷的控制系統(tǒng)也越來(lái)越復(fù)雜,控制系統(tǒng)包含的設(shè)備有航行控制器、導(dǎo)航設(shè)備、舵機(jī)、敏感元件等。
導(dǎo)航設(shè)備則提供彈體的方位、速度參數(shù);航行控制器根據(jù)水雷彈體的方位、速度以及目標(biāo)的方位、距離進(jìn)行操舵舵角解算;舵機(jī)單元?jiǎng)t根據(jù)航行控制器解算的操舵舵角和實(shí)際舵角進(jìn)行閉環(huán)控制,輸出系統(tǒng)所需要的操舵角,使彈體偏轉(zhuǎn);敏感元件則獲取水雷彈體的姿態(tài)參數(shù)和環(huán)境參數(shù)。
2 HILS結(jié)構(gòu)組成
HILS結(jié)構(gòu)(如圖1所示)由3部分構(gòu)成:①仿真計(jì)算機(jī)用來(lái)進(jìn)行動(dòng)力模型的設(shè)計(jì)及運(yùn)行程序、處理數(shù)據(jù);②環(huán)境模擬設(shè)備包括運(yùn)動(dòng)仿真器、角運(yùn)動(dòng)仿真器、目標(biāo)特性仿真器等仿真設(shè)備;③被測(cè)實(shí)物一般指控制微機(jī)板、傳感器、執(zhí)行機(jī)構(gòu)等硬件設(shè)備[1]。
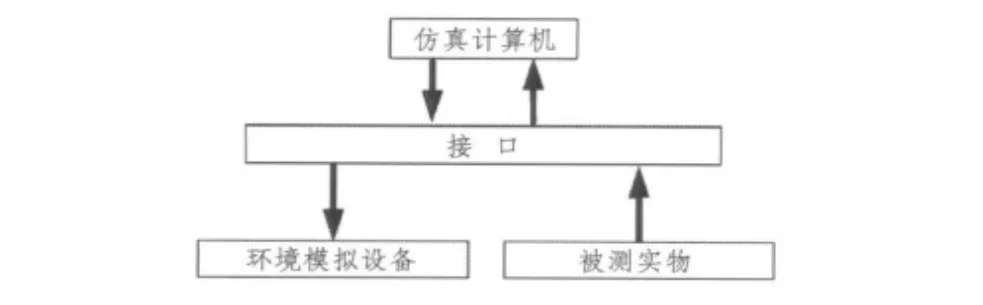
圖1 HILS結(jié)構(gòu)圖Fig.1Structure of HILS
3 水雷控制系統(tǒng)的HILS功能設(shè)計(jì)
水雷控制系統(tǒng)的半實(shí)物仿真試驗(yàn),要求能為水雷控制系統(tǒng)提供真實(shí)的工作環(huán)境,并充分模擬不同的工作條件,以檢驗(yàn)系統(tǒng)的各種功能和可靠性。具體表現(xiàn)在實(shí)現(xiàn)如下功能[2]:
1)進(jìn)行水雷的6自由度非線(xiàn)性模型仿真解算;
2)通過(guò)數(shù)字舵機(jī)返回的通信報(bào)文,獲取實(shí)時(shí)的橫舵、直舵角值;
3)通過(guò)深度模擬裝置模擬水雷航行的深度,并通過(guò)壓力傳感器讀取;
4)通過(guò)三維運(yùn)動(dòng)模擬器實(shí)時(shí)模擬水雷的運(yùn)動(dòng)航行和姿態(tài);
5)通過(guò)慣性測(cè)量組合和仿真計(jì)算機(jī)記錄下航行軌跡。
4 水雷控制系統(tǒng)的HILS系統(tǒng)構(gòu)成
為了實(shí)現(xiàn)上述功能,在進(jìn)行水雷控制系統(tǒng)HILS設(shè)計(jì)時(shí),必須包括以下設(shè)備[3]:
1)DSPACE實(shí)時(shí)仿真系統(tǒng),主要功能是仿真控制對(duì)象和環(huán)境;
2)MATLAB仿真工作站,主要功能是建立水雷控制系統(tǒng)的數(shù)學(xué)模型;
3)FLUENT仿真工作站,主要完成彈體特性分析、流體動(dòng)力性能分析;
4)三軸轉(zhuǎn)臺(tái),通過(guò)轉(zhuǎn)臺(tái)的3個(gè)軸的轉(zhuǎn)動(dòng),模擬水雷的航行姿態(tài)變化,形成逼真的水下運(yùn)動(dòng)環(huán)境。
5)深度模擬器,通過(guò)壓力的變化調(diào)節(jié),為水雷控制系統(tǒng)的深度傳感器提供深度信息;
6)航行控制器,基于微機(jī)板的航行控制硬件結(jié)構(gòu),通過(guò)接收到的目標(biāo)、自身的速度和信息進(jìn)行姿態(tài)解算,解算出控制舵角操舵指令后發(fā)給數(shù)字舵機(jī);
7)數(shù)字舵機(jī),作為航行控制系統(tǒng)的執(zhí)行機(jī)構(gòu),通過(guò)操縱橫舵、直舵和差動(dòng)舵3個(gè)舵面來(lái)實(shí)現(xiàn)導(dǎo)引航行;
8)裝定器,通過(guò)串行通信口發(fā)送虛擬目標(biāo)信息;
9)慣性測(cè)量系統(tǒng),提供水雷的實(shí)時(shí)方位及速度信息,并記錄下彈道軌跡。
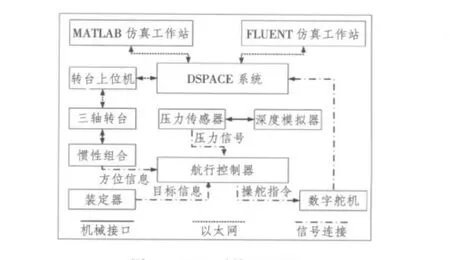
圖2 HILS系統(tǒng)原理圖Fig.2Schematic of HILS system
5 水雷控制系統(tǒng)的HILS工作原理
由上述仿真設(shè)備和部分實(shí)物組成的HILS系統(tǒng)結(jié)構(gòu)圖如圖2所示,其工作原理如下:系統(tǒng)上電后,裝定設(shè)備向航行控制器發(fā)送虛擬目標(biāo)信息,航行控制器隨即根據(jù)目標(biāo)信息進(jìn)行舵角控制律的解算,解算出合適的操舵指令后發(fā)給數(shù)字舵機(jī)伺服系統(tǒng),數(shù)字舵機(jī)開(kāi)始進(jìn)行操舵,舵角信息反饋至DSPACE系統(tǒng)控制對(duì)象模型,該系統(tǒng)根據(jù)水雷的模型和運(yùn)動(dòng)學(xué)方程計(jì)算出水雷的實(shí)時(shí)姿態(tài)信息,并輸出至三軸轉(zhuǎn)臺(tái),三軸轉(zhuǎn)臺(tái)隨即開(kāi)始進(jìn)行轉(zhuǎn)動(dòng),模擬水雷的真實(shí)姿態(tài)變化,慣性測(cè)量組合則不斷解算出水雷的航行軌跡,并將水雷的方位、速率信息發(fā)送給航行控制器,并記錄下水雷的航行軌跡,最后,將運(yùn)動(dòng)曲線(xiàn)顯示在屏幕上,并計(jì)算相關(guān)的超調(diào)量、響應(yīng)時(shí)間、穩(wěn)態(tài)誤差等性能指標(biāo)參數(shù),以此來(lái)檢驗(yàn)水雷控制系統(tǒng)的工作性能。
6 HILS仿真結(jié)果分析
通過(guò)裝定器發(fā)送的虛擬目標(biāo)方位信息為(26.5°,26.5°),經(jīng)過(guò)控制系統(tǒng)的半實(shí)物仿真,所得的系統(tǒng)HILS彈道曲線(xiàn)如圖3所示,彈道數(shù)據(jù)如表1所示。
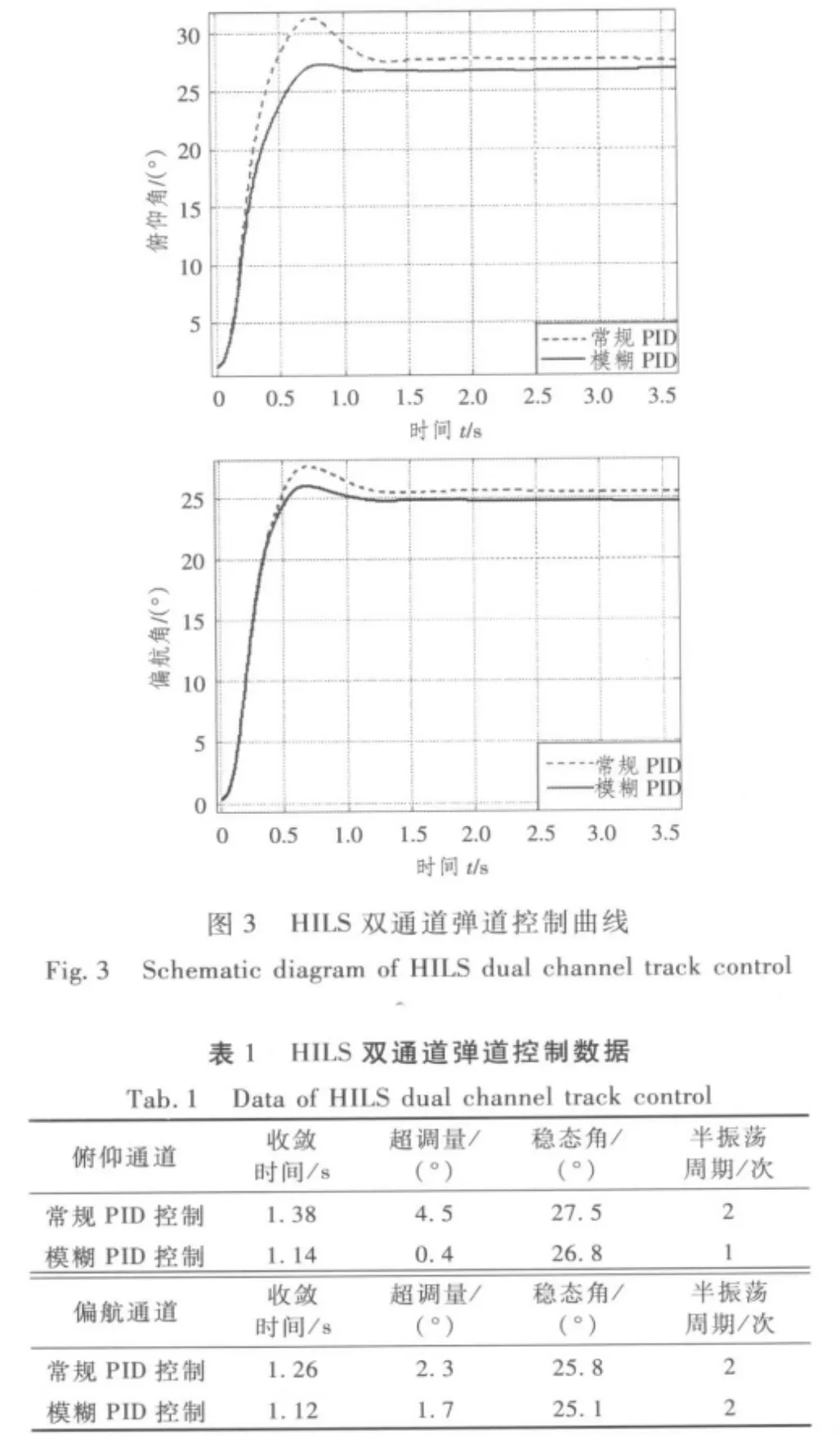
由HILS仿真結(jié)果可以看出,通過(guò)理論計(jì)算的穩(wěn)態(tài)俯仰角和偏航角應(yīng)為26.5°,在控制系統(tǒng)的作用下,水雷的彈道軌跡超調(diào)量≤1.7°,穩(wěn)態(tài)誤差≤1.6°,最大超調(diào)約≤8%,穩(wěn)定收斂時(shí)間≤1.14 s,半振蕩周期≤2。由此可以得出結(jié)論,該水雷控制系統(tǒng)很好地實(shí)現(xiàn)了航向?qū)б刂疲{(diào)較小,收斂時(shí)間較快,缺點(diǎn)是穩(wěn)態(tài)誤差略大。分析航行控制算法得知,航行控制舵角控制律解算時(shí)采取的是PD控制律,缺少積分I環(huán)節(jié),因此導(dǎo)致穩(wěn)態(tài)誤差較大,后續(xù)的改進(jìn)設(shè)計(jì)則應(yīng)該通過(guò)在控制律中增加積分環(huán)節(jié)來(lái)有效減小穩(wěn)態(tài)誤差。
為了進(jìn)一步驗(yàn)證水雷控制系統(tǒng)的魯棒性,選擇將仿真流體模型中的敏感參數(shù)偏離試驗(yàn)初值20%的情況,進(jìn)行綜合拉偏試驗(yàn),所得彈道控制曲線(xiàn)如圖4所示。
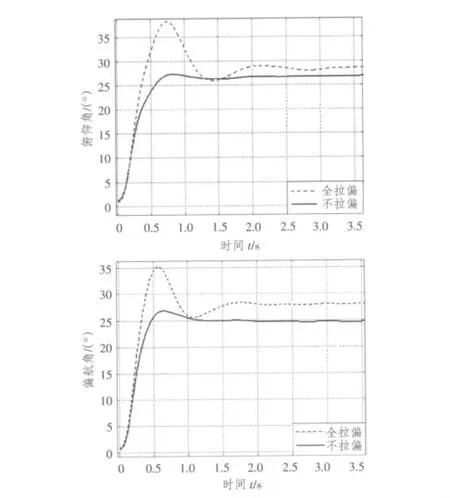
圖4 全拉偏雙通道彈道控制曲線(xiàn)圖Fig.4Full bais schematic diagram of dual channel track control
由半實(shí)物仿真系統(tǒng)姿態(tài)曲線(xiàn)可以得出結(jié)論,該水雷控制系統(tǒng)能較好地滿(mǎn)足快速性、穩(wěn)定性等指標(biāo)要求,且能在拉偏±20%的狀態(tài)下完成穩(wěn)定的航行導(dǎo)引控制,控制能力較強(qiáng)。相信經(jīng)過(guò)不斷的控制參數(shù)調(diào)整和算法優(yōu)化,控制能力還能得到進(jìn)一步的提升。
7 結(jié)語(yǔ)
從上述HILS仿真結(jié)果可以得出結(jié)論:半實(shí)物仿真可以有效地模擬水雷工作環(huán)境和姿態(tài)變化,并通過(guò)一系列實(shí)物檢驗(yàn)控制系統(tǒng)的性能,其仿真結(jié)果具有較高的置信度,且通過(guò)仿真結(jié)果可以快速有效地找出系統(tǒng)設(shè)計(jì)需要改進(jìn)的地方,大大減少了科研周期和研制經(jīng)費(fèi)。可以斷定,HILS技術(shù)將在水中兵器工程研制中扮演越來(lái)越重要的角色。
[1]雷葉紅.張記華.張春明.基于dSPACE/MATLA B/ Simulink平臺(tái)的實(shí)時(shí)仿真技術(shù)研究[J].系統(tǒng)仿真技術(shù),2005,(3):131-135.
LEI Ye-hong,ZHANG Ji-hua,ZHANG Chun-ming.A real-time system simulation platform based on dSPACE/ MATLAB/simulink[J].System Simulation Technology,2005,(3):131-135.
[2]郝睿君.精確制導(dǎo)半實(shí)物仿真技術(shù)研究[D].南京:南京理工大學(xué).2004.
[3]王茂勵(lì).無(wú)人水下航行器的運(yùn)動(dòng)建模與控制策略研究[D].西安:西北工業(yè)大學(xué).2007.
[4]彭荊明.舒旭光.深彈控制仿真系統(tǒng)研究[J].水雷戰(zhàn)與艦船防護(hù),2009,(1):35-38.
PENG Jing-ming,SHU Xu-guang.Research on control simulation system of depth charge[J].Mine Warfare&Ship Self-Defence,2009,(1):35-38.
[5]杜亞娟.半實(shí)物仿真綜合實(shí)驗(yàn)臺(tái)控制系統(tǒng)方案[J].計(jì)算機(jī)工程,2010,(22):233-235.
DU Ya-juan.Scheme of control system in half-physical simulationcomprehensivetest-bed[J].Computer Engineering,2010,(22):233-235.
[6]杜潤(rùn)樂(lè),王永海.一種導(dǎo)彈控制系統(tǒng)的新型仿真技術(shù)研究[J].導(dǎo)彈與航天運(yùn)載技術(shù),2010,(2):12-17.
DURun-le,WANGYong-hai.Anewsimulation technology for missiles control system[J].Missiles and Space Vehicles,2010,(2):12-17.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32