基于模擬統計法的水聲對抗試驗航路優化
2012-03-07 06:22:56馬國強曹海軍
艦船科學技術 2012年7期
關鍵詞:優化
馬國強,曹海軍
(中國人民解放軍91388部隊,廣東湛江 524022)
0 引言
水聲對抗試驗是靶場承擔的一類重要的試驗,由于組織一次水聲對抗試驗涉及的兵力眾多,試驗費用昂貴,組織實施復雜,因而不可能進行大量的試驗。必須對試驗航路的優化問題進行研究,根據研究結果,挑選出具有代表性的優化試驗航路進行海上實航試驗,使有限航次的海上實航考核更具有典型性、合理性,以有效控制并大幅度降低水聲對抗試驗的費用。
所謂水聲對抗試驗航路的優化問題,就是當艦艇發現魚雷攻擊時,艦艇何時發射對抗裝置,采用何種方式規避以及如何發射對抗裝置,才能使對抗魚雷更加有效。研究試驗航路的優化問題,一種比較傳統而又成熟的方法便是采用基于模擬統計方法(Monte_Carlo)的仿真方法,該方法根據不同的試驗態姿和條件,結合誘餌對自導魚雷的聲誘騙原理,按時間步長推演艦艇、魚雷和誘餌三者之間的位置和狀態的變化,在多種可窮舉的航路中,根據優化航路的評估標準,最后確定一種優化航路。
1 潛艇水聲對抗作戰的一般過程及優化航路的參數選取
潛艇在進行水聲對抗作戰時,一般在潛艇魚雷報警后經過一定的系統反應時間tR即可發射水聲對抗器材。這里的系統反應時間包括從魚雷報警到指揮員作出判斷,定下決心,下達進行水聲對抗的命令時間tC和下達對抗命令到系統準備好可以發射水聲對抗器材的時間tp,因此有tR=tC+tp。
潛艇在受到自導魚雷攻擊時,若潛艇沒有裝備水聲對抗器材,潛艇一般進行戰術機動以擺脫魚雷的攻擊;若潛艇裝備有水聲對抗器材,則潛艇首先發射水聲對抗器材,然后進行戰術機動。為了取得最佳的水聲對抗效果,潛艇進行水聲對抗作戰,不無例外地把發射水聲對抗器材和潛艇本身的機動相結合。因此,在研究航路優化問題時把潛艇發射水聲對抗器材和潛艇戰術機動作為最基本的水聲對抗作戰模式。
潛艇規避來襲魚雷的機動方式主要有3種[1]:變速、變深和旋回及它們的組合。常規動力潛艇水下速度不高,增速由于受到所攜帶能源的限制不便經常采用;減速往往對規避魚雷反而不利,變深由于太慢也收不到良好的規避效果,所以旋回機動是最常用和有效的規避方法。因此,本文中選擇潛艇旋回機動作為進行航路優化設計的基本模式。
試驗航路優化最終是為了確定一種合理的戰術態勢。根據以上分析,最終把對抗器材的發射時機tF、對抗器材發射方向φ、防御艇規避方向θ這3個參數作為優化航路的參數[2]。
選取不同的tF,φ,θ,構成一種不同的戰術態姿,每種試驗態姿都可以取得評估指標,最后根據評估標準來確定最優的試驗航路。在實際的模型建立中,假定對抗器材發射時機tF和潛艇開始旋回機動的時刻tR相同。
2 水聲對抗優化試驗方案的評估指標
利用1次仿真試驗航路所記錄的參數來評定該試驗航路的優劣,顯然不能用概率統計值來表達。因此,在確定某次水聲對抗試驗方案的優劣評估體系指標時,立足于在1次仿真對抗試驗過程中記錄的魚雷、對抗器材、防御艇的參數來確定試驗航路優化的評估體系。
1)有效對抗時間tE
當防御方潛艇發現來襲魚雷攻擊時施放對抗裝備,使魚雷丟失目標、跟蹤誘餌或使魚雷處于迷茫狀態,魚雷丟失目標、跟蹤誘餌或使魚雷處于迷茫狀態的時間就是對抗裝備的有效對抗時間。用有效對抗時間tE可以表示對抗裝備在1次對抗自導魚雷時的對抗效果。1次對抗試驗中,有效對抗時間tE越長,水聲對抗試驗就越充分。
2)有效對抗距離R
防御艇發射干擾裝備后,干擾裝備對自導魚雷實施有效干擾,自導魚雷首次追上干擾裝備時,自導魚雷與防御艇之間的距離,稱之為有效對抗距離,用R表示。

式中:[xT,yT,zT]為對抗過程中自導魚雷首次追上干擾裝備時魚雷的坐標;[xy,yy,zy]為對抗過程中自導魚雷首次追上干擾裝備時防御艇的坐標。
3)最小雷目距離Rmin
防御艇實施水聲對抗時,在發射聲誘餌后,馬上進行戰術規避機動,如果實施對抗有效,則魚雷總是首先捕獲聲誘餌并與聲誘餌建立應答關系;在防御艇實施水聲對抗的整個過程中,把魚雷與目標之間的距離稱之為雷目距離,即

式中:[xT(t),yT(t),zT(t)]為對抗過程中魚雷的坐標;[xW(t),yW(t),zW(t)]為對抗過程中防御艇的坐標。
顯然,雷目距離是時間的函數,把min(R(t))稱之為最小雷目距離,并記為Rmin。
海上試驗的安全是極其重要的問題,因此在優化航路的選取時,必須考慮到這個因素。
4)魚雷出水點位置(xTE,yTE)
作為水聲對抗試驗用的魚雷一般采用操雷,試驗結束后要及時回收,否則很容易造成魚雷丟失;水聲對抗試驗方案的仿真,除確保優化試驗航路外,另一個重要的作用就是準確地提供水聲對抗試驗結束后魚雷的出水位置,以確保在試驗開始前撈雷船在預測的魚雷出水點位置附近就位。
3 試驗航路的優化標準
設計水聲對抗試驗航路的目的是為了充分考核水聲對抗器材的對抗效果,因此,從水聲對抗器材試驗的角度出發,成功的航路設計至少應保證水聲對抗器材對抗聲自導魚雷有效,不命中防御方潛艇,否則視為失敗的試驗航路設計;航路的優化設計建立在成功的航路設計基礎之上。
航路的優化設計主要以水聲對抗試驗方案的評估指標為依據,以上指標對于航路的優化設計的權重不一樣,我們把它分為3類,最小雷目距離Rmin為一類指標;有效對抗時間tE及有效對抗距離R為二類指標;魚雷出水點位置(xTE,yTE)為三類指標。
根據以上分析,航路優化設計建立在成功的航路設計基礎之上,因此一類指標最小雷目距離Rmin作為航路優化設計的最基本依據。假設魚雷的自導作用距離為r,若Rmin<r,則該航次不認作為成功的航路。把Rmin≥r的試驗航路稱之為成功的試驗航路,而最小雷目距離Rmin的數值大小不作為評定航路優化的第一標準,航路優化的第一標準主要由二類指標決定,有效對抗時間tE越大,則說明對抗試驗越充分,有理由相信該航路最優。若成功試驗航路的所有有效對抗時間tE相同,則把具有最大的有效對抗距離R的航路選定為最優試驗航路。三類指標魚雷出水點位置(xTE,yTE)作為撈雷船就位的依據,不作為評定試驗航路優化的依據。
4 基于Monte_Carlo法的水聲對抗試驗航路優化設計
從理論上講,利用Monte_Carlo仿真方法設計優化航路,應根據優化航路的參數選取標準,窮舉各種對抗器材發射時機tE、對抗器材發射方向φ及防御艇規避方向θ,構成不同的戰術態姿,根據每種試驗態姿可以取得評估指標,最后根據評估標準來確定最優的試驗航路。顯然,這種運算量是很大的,為此必須根據水聲對抗器材的實際作戰使用要求,來選擇典型的態姿進行優化。
從作戰使用角度看,聲誘餌的基本使用原則是作為假目標使用,發射聲誘餌的目的是讓魚雷發現它并跟蹤它而去,我艇則借聲誘餌的掩護迅速規避,本艇規避的原則是盡快地與聲誘餌拉開距離。因此,選擇聲誘餌發射航向的應遵循以下原則[3]:一是保證魚雷先發現誘餌;二是魚雷追蹤誘餌過程中和追上誘餌進行再搜索時,離本艇越遠越好。
利用Monte_Carlo仿真方法設計優化航路需要編制水聲對抗作戰過程的仿真軟件,以某型自導魚雷和某型懸浮式(自航式)誘餌為例,采用MATLAB語言進行仿真,并作如下約定:
1)攻方和防御方均為水下潛艇。在對抗作戰過程中,僅考慮參戰雙方最簡單的一對一的對抗方式,在1次對抗過程中,防御方僅采用單一的對抗器材對抗自導魚雷,不考慮實際作戰過程中的聯合對抗方案,并且只交戰1個回合;并且假定當魚雷的航程耗盡或命中目標艇時,對抗過程結束;
2)選擇旋回機動作為潛艇進行水聲對抗作戰仿真的基本規避方法,且不考慮防御艇的加速運動;
3)假定攻方和防御方潛艇均在同一水平面上;
4)用于對抗的自導魚雷不具備真假目標識別能力;
5)自航式聲誘餌的彈道僅考慮直航彈道。
4.1 坐標系的建立及初始參數的確定
要實現魚雷在水聲對抗環境下全彈道的仿真,首先要確定合適的坐標系。在實際仿真計算中,選擇以魚雷發射點為坐標原點,以正東方向為x軸,以正北方向為y軸建立計算坐標系。
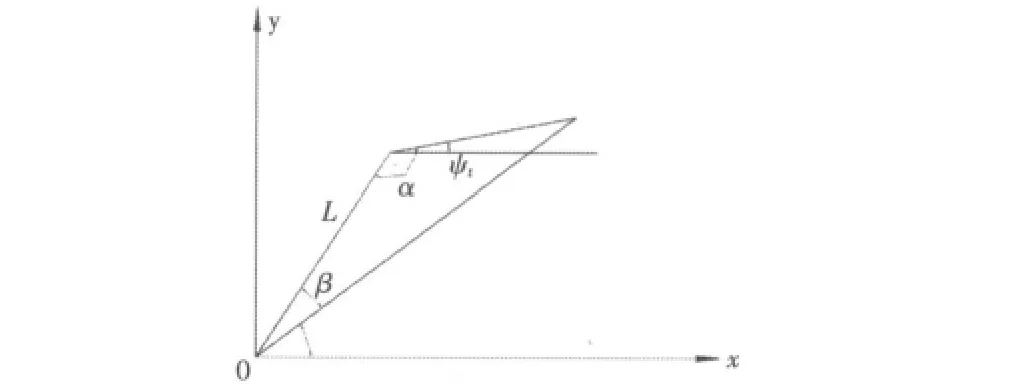
圖1 基于Monte_Carlo仿真計算的坐標系Fig.1Reference frame for Monte_Carlo simulation
圖1中,L為自導魚雷的射距;α為敵舷角;β為魚雷射擊最優提前角,由下面的公式確定[4]:
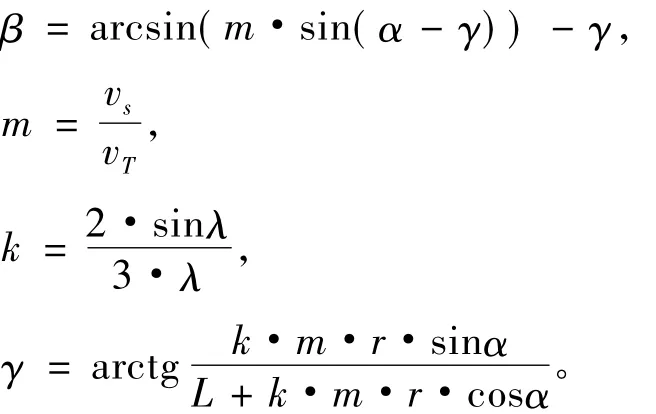
式中:λ為魚雷自導扇面開角的一半;r為自導作用距離。
4.2 魚雷自導檢測模型
本文采用基于主動聲吶方程的自導檢測模型。噪聲掩蔽下的主動聲吶方程[5]可表述為

式中:G(α1)和G(α2)分別為發射和接收指向性函數;TS(φ)表示目標反射強度隨入射角的變化,但對聲誘餌而言,目標反射強度為一固定值,在仿真中設定,其數值要比潛艇目標的反射強度大許多。
在魚雷彈道仿真的任一節點,當滿足式(1),且目標落入魚雷自導接收扇面λ內時,便認為魚雷的自導系統檢測到一次目標。
4.3 魚雷的全彈道模型
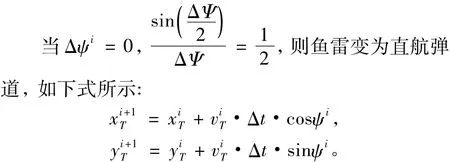
自導魚雷的彈道模型,采用數字積分法[6]進行等深水平面準全彈道模擬,每一時刻魚雷運動方向及位置逐點累加,公式如下:
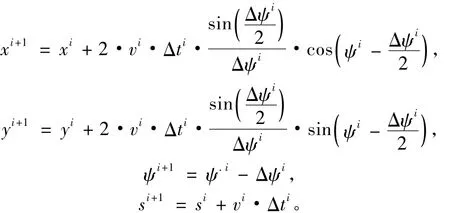
式中,ΔΨi的正負號決定魚雷的操舵(正號操右舵,負號操左舵)。
4.4 懸浮式聲誘餌對抗環境下的試驗航路優化仿真
圖2表示自導魚雷首先捕獲并穿過懸浮式聲誘餌,進入環行搜索狀態后自導魚雷發現并命中目標的全程對抗圖,表明對抗失敗。
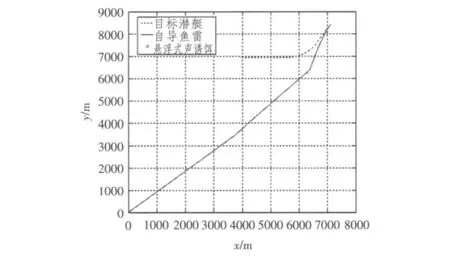
圖2 懸浮式聲誘餌對抗聲自導魚雷Fig.2A figure of buoyant decoy antagonizing homing torpedo
圖3表示自導魚雷首先捕獲并穿過懸浮式聲誘餌,環行搜索后自導魚雷繼續發現聲誘餌并環行至航程耗盡,表明對抗成功。
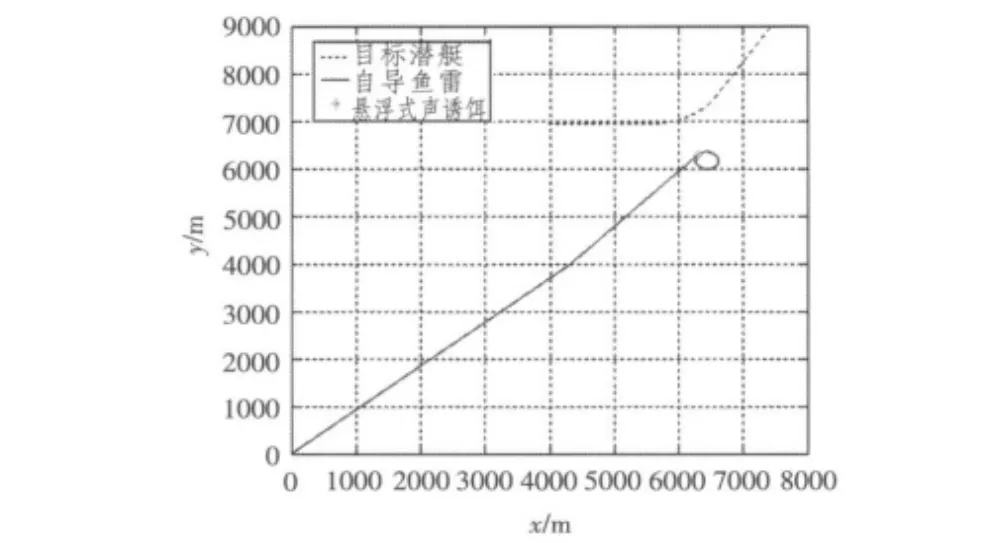
圖3 懸浮式聲誘餌對抗聲自導魚雷Fig.3A figure of buoyant decoy antagonizing homing torpedo
4.5 自航式聲誘餌對抗環境下的試驗航路優化仿真
圖4表示自導魚雷首先捕獲并穿過自航式聲誘餌,環行搜索后自導魚雷發現并命中目標的全程對抗圖,表明對抗失敗。

圖5表示自導魚雷首先捕獲并穿過自航式聲誘餌,環行搜索后自導魚雷繼續發現聲誘餌并環行至航程耗盡,表明對抗成功。
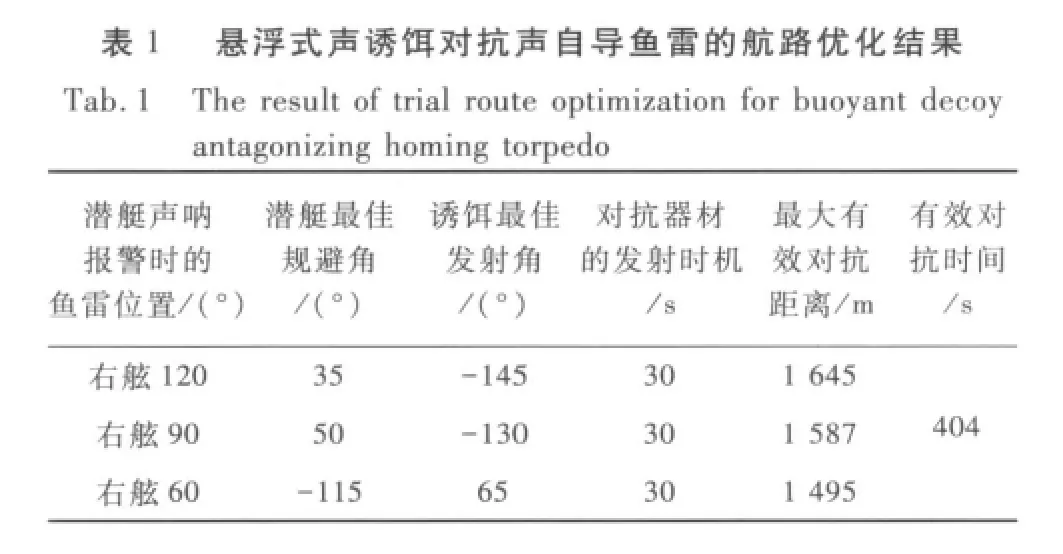
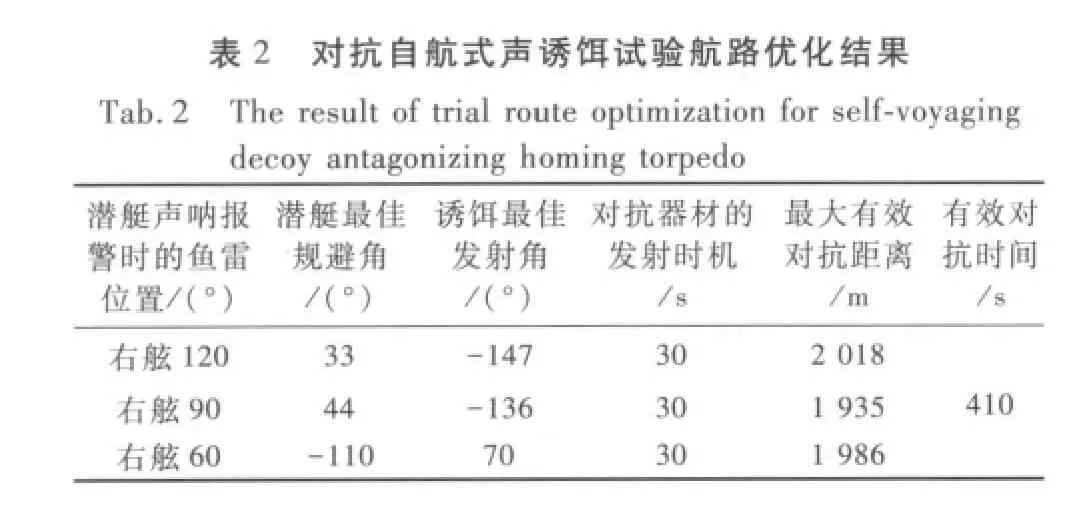
4.6 聲誘餌對抗環境下的試驗航路優化結果
在航路優化的仿真計算中,取目標潛艇的航向為正東方向,即航向角為0°,潛艇規避角定義為潛艇的航向與正東方向的夾角(假定逆時針方向為正);聲誘餌發射角定義為聲誘餌發射方向與正東方向的夾角,并且假定防御艇在發現魚雷后經過水聲對抗系統的反應時間30 s后,即發射對抗器材,通過比較有效對抗距離的大小,得到試驗優化航路的參數見表1和表2。
5 結語
本文利用Monte_Carlo法,在一定的約束條件下,根據所建立的優化航路評估標準,對潛艇對抗自導魚雷試驗航路優化問題進行了探討,并進行了計算機仿真,從仿真結果可以得出如下結論:
1)無論對于懸浮式聲誘餌還是自航式聲誘餌,3種不同態姿下的有效對抗時間都一樣,表明魚雷在搜索目標過程中一開始就受到聲誘餌的誘騙,直至耗盡魚雷的全部航程。出現這種情況的主要原因是防御艇的聲吶報警距離較魚雷自導作用距離要大得多,防御艇發現魚雷后經過系統反應時間發射聲誘餌,由于聲誘餌的回波反射強度比目標的反射強度設定要大,因此,對于沒有目標識別能力的魚雷來說,是極易受到全程干擾的;
2)潛艇最佳規避角和誘餌最佳發射角之和大約接近180°,體現了聲誘餌作為假目標使用的作戰原則;
3)自航式聲誘餌誘騙魚雷時的有效對抗距離遠大于懸浮式聲誘餌誘騙魚雷時的有效對抗距離。這可進一步確保潛艇的安全性,從而說明只要使用時機得當,自航式聲誘餌的對抗效果要明顯優于懸浮式聲誘餌的對抗效果。
[1]楊日杰,高學強,等.現代水聲對抗技術與應用[M].北京:國防工業出版社,2008.
YANG Ri-jie,GAO Xue-qiang,et al.Modern underwater acoustic technology and its application[M].Beijing: National Defense Industry Press,2008.
[2]馬國強,劉朝暉,徐德民.潛艇對抗自導魚雷的試驗航路優化模型研究[J].魚雷技術,2004,12(4):43-46.
MA Guo-qiang,LIU Zhao-hui,XU De-min.A study of trial route optimization model for submarine acoustic warfare[J].Torpedo Technology,2004,12(4):43-46.
[3]侯琳,胡波,章桂永.潛艇自航式聲誘餌發射方向的仿真研究[J].計算機仿真,2009,26(6):23-25.
HOU Lin,HUBo,ZHANGGui-yong.Simulationof launching direction of swim-out acoustic decoy for submarine[J].Computer Simulation,2009,26(6):23-250.
[4]孟慶玉,等.魚雷作戰效能分析[M].北京:國防工業出版社,2003.
MENG Qing-yu,et al.Analysis of operational effectiveness for torpedo[M].Beijing:National Defense Industry Press,2003.
[5]劉孟庵.水聲工程[M].杭州:浙江科學技術出版社,2002.
LIU Meng-an.Underwater engineering[M].Hangzhou: Zhejiang Science and Technology Press,2002.
[6]于昌榮,苗艷.潛艇使用自航式聲誘餌防御聲自導魚雷模型研究[J].指揮控制與仿真,2009,31(3):61-64.
YUChang-rong,MiaoYan.Researchonmodelof defending acoustic homing torpedo using mobile acoustic decoy by submarine[J].Command Control&Simulation,2009,31(3):61-64.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45