一種PFM電荷泵充放電系統的驅動電路設計
2012-03-15 07:45:46
電子世界 2012年11期
關鍵詞:信號
1.引言
隨著信息技術的發展,電源管理已經廣泛應用于各類電子產品,因此電源管理芯片尤其重要。而電源管理芯片的驅動電路隨著應用產品的不同而不同的變化,如采用額外的專用驅動芯片來驅動產品,不僅占用更多的系統資源,而且成本過高,這在應用到許多消費類電子產品中是難以接受的。本文討論的是一款普通消費類電子芯片的驅動電路,從降低成本考慮,芯片采用BiCmos 0.6 um制造工藝,從降低功耗考慮,芯片采用5V電源供電,內置電源絡壓電路,將驅動電路集成在電源芯片中。
2.充放電系統調制方式
充放電系統對開關基本的控制方法有兩種,分別是脈沖寬度調制(PWM);脈沖頻率調制(PFM)。PWM是開關頻率恒定,通過調節脈沖寬度來改變占空比,實現充電時間的控制;PFM是脈沖寬度恒定,通過調節開關頻率來改變開關通斷比,從而實現充電放電時間的控制。
PWM調制是DC-DC轉換器中很常用的調制方式,通過負載反饋信號與內部產生的鋸齒波信號進行比較,然后得到頻率恒定而脈沖寬度不同的方波信號,用這些信號控制開關管從而穩定輸出電壓,其波形如圖1所示。
從圖可以看出,反饋信號與鋸齒波相交,反饋信號大于鋸齒波時,PWM控制信號輸出高電平;當反饋信號小于鋸齒波時,PWM信號輸出低電平,PWM控制方式在輕負載時效率不高。
PFM在需要向負載傳遞電荷的時候才啟動電荷泵工作,當輸出電壓高于5V的時候,電荷泵轉換器停止工作,而當輸出電壓低于5V的時候電荷泵啟動,直到輸出電壓升到目標電壓。
由圖2可得,反饋信號低于比較信號時,PFM等脈寬工作,而反饋信號高于目標調制電壓時,PFM信號頻率為0,電荷泵停止工作,等到放電使得輸出電壓降低后,電荷泵繼續啟動,周而復始,系統提供穩定的輸出電壓。
相對于PWM調制而言,PFM在峰值相當的情況下,PFM的效率遠遠高于PWM,當輕載時,電荷泵處于低工作電流的空閑狀態。電荷泵只是被偶爾啟動,動態損耗大大減小,總的工作電流被降到最低。本文采用PFM調制控制方式,當輸出電壓高于目標電壓時,電荷泵停止;當輸出電壓低于目標電壓時,電荷泵啟動。偶爾啟動電荷泵進行充放電,提高系統的轉換效率。
3.電荷泵充放電系統
電荷泵開關連接電路如圖3所示,驅動電路輸出的C1、C3、C4信號分別控制各個大功率開關,由于在驅動模塊經反相器處理過延時,確保C1、C3、C4信號任何時刻不存在兩個相位狀態管同時導通的情況,因此對驅動電路提出了更高的要求。電路中加入了外部元件快速充電器C_FLY,C_FLY分別接芯片的C+與C-引腳。
驅動信號同一時刻不能使得前后兩個相位狀態下功率開關管同時打開。圖3中C3和C1是相位相同并且不交替的信號,為了防止M1、M2和M3同時導通損耗能量,要發生開關動作首先要關閉M3管,只有在M3管完全關閉的情況下,才能開啟M1和M2;反過來,當M3處在關閉的情況下要開啟M3管,首先應該關閉M1和M2管。
另外芯片工作過程中,VOUT端口的電平為穩定5V,為了消除襯底偏值對M5和M6的影響,在VOUT和PAD_C+之間接入了M7和M8這兩個管子,用來比較VOUT和PAD_C+之間的高電平,抬高襯底電壓。
電路中驅動功率開關管的柵極電壓需要盡量大的擺動幅度,而只將輸入電壓作為驅動電路的電源電壓時,在低輸入電壓時驅動電路無法輸出高達5V的驅動信號。因此本文設計驅動電路時須具有比較功能的電平轉換電路,在輸入電壓與輸出電壓之間做簡單的比較,把兩者之間高的電壓作為驅動電路的電源電壓,保證在輸出電壓建立過程中驅動電路能夠提供正確的柵極驅動信號。
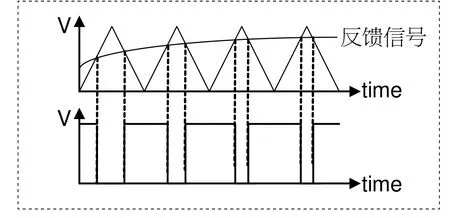
圖1 PWM工作原理圖
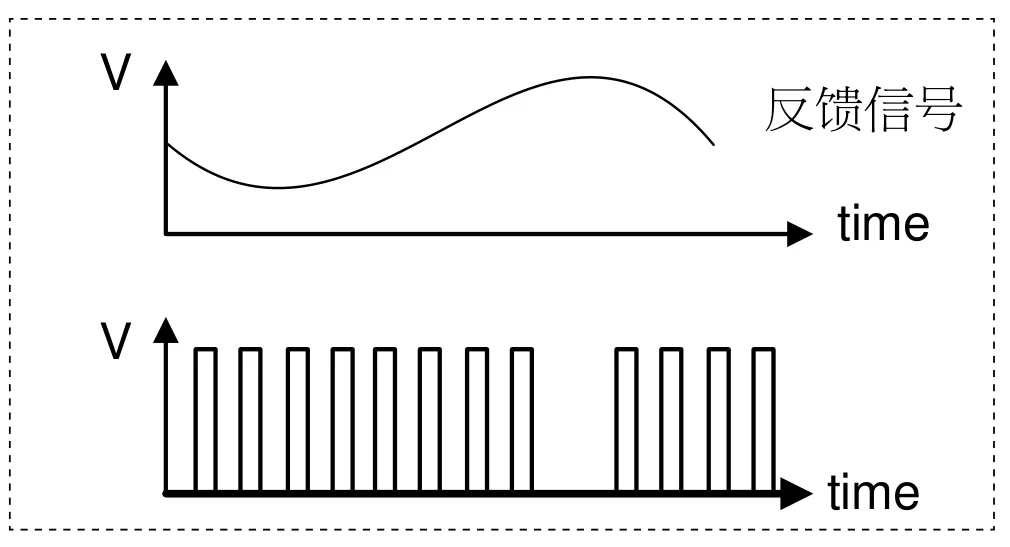
圖2 PFM工作原理
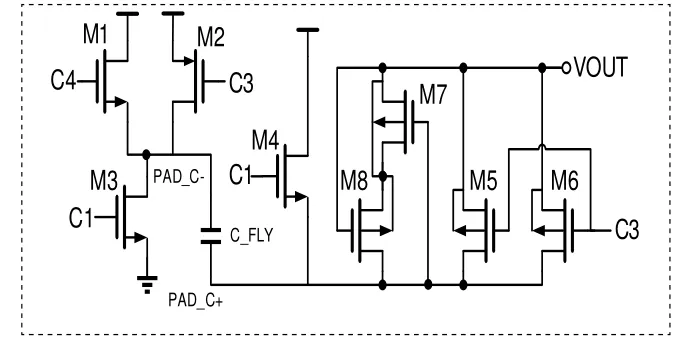
圖3 大功率MOS開關管電路
4.電平轉換器
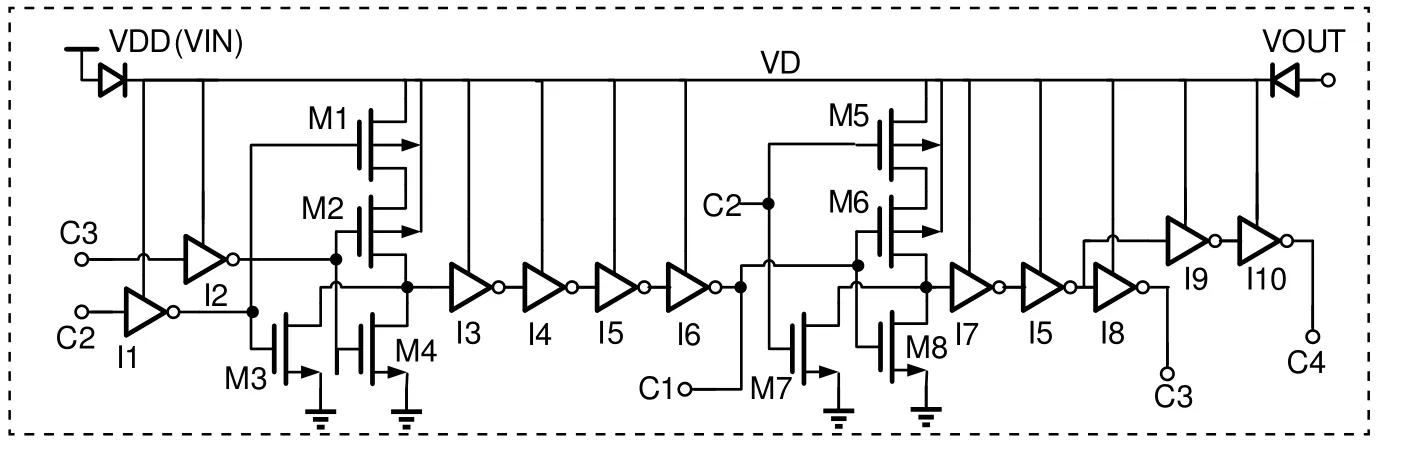
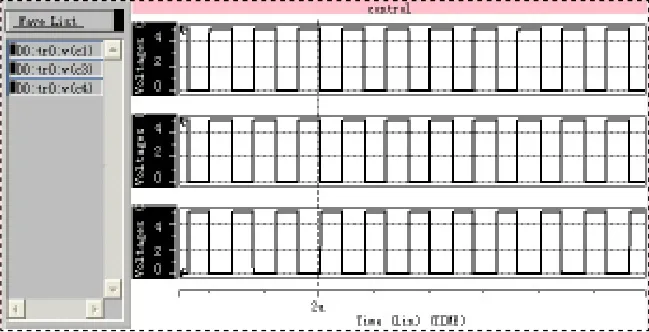
系統需要設計電平選擇功能,VOUT>VIN時,電平轉換器的供電電平為VOUT;VOUT 芯片穩定工作后,電荷泵將輸出電壓穩定在5V左右,此時VD>VDD(VIN),電平轉換的原理圖如下圖4所示。 圖4中電平轉換器的輸入信號V_low送進電平轉換器,M5、M6、M7、M8組成一個正反饋比較器,其他供電電壓為升壓通路的輸出電壓VD,圖4中電路在工作時,VD比VIN大,V_low的控制信號和其反相信號分別送入M8、M6的柵極。若V_low為高電平,則M6導通,M8截止,通過反饋通路,V_high輸出高電平,其大小與VD等值。若V_low為低電平,則M6截止,M8導通,V_high輸出低電平。由此實現了柵極控制信號的電平轉換。 圖4 電平轉換電路 驅動電路的具體電路如圖5所示。輸出輸入信號線功能描述如下: VOUT(模塊輸入信號):芯片輸出電壓。 C1、C3、C4(模塊輸出信號):700KHz方波信號。 C2(模塊輸入信號):700KHz方波信號。 VDD(模塊輸入信號):電源電壓即輸入電壓。 VD:當VDD(VIN)>VOUT,VD=VIN;反之,VD=VOUT。 圖5 功率級驅動電路 驅動模塊的信號直接輸送到電荷泵開關管,負責系統的充放電,因此需要信號的延遲小并且能準確實時的進行開與關。但是芯片剛開始工作時,輸出電壓接近0,僅有輸入電壓作為驅動模塊的電源電壓,反相器中的PMOS管很容易進入線性區,此時驅動電路無法正常工作。 芯片的輸出電壓VOUT端口的最高電平為5V,而輸入電源電壓是2.7V-5.5V,因而RC振蕩器輸出高電平也為2.7V-5.5V,對應在驅動電路中輸出的三個控制信號的高電平也為2.7V-5.5V。為了解決這個問題,如圖5所示,在驅動的電路模塊中將一對反向連接的二極管接在VOUT和VIN之間,這樣就可以保證驅動電路的襯底電壓穩定,進而使得芯片得到穩定的輸出,之后就直接用輸出電壓作為襯底電壓。驅動電路C1、C3、C4端輸出信號仿真如圖6所示。 圖6 驅動電路C1、C3、C4端輸出波形 本文通過比較PFM和PWM兩種調制方式開始對充放電系統進行分析,采用PFM作為系統的調制方式;設計了PFM電荷泵系統電路、電平轉換電路和驅動電路,并對系統設計中需要考慮細節也做了詳細的分析,最終使得驅動電路能滿足充放電系統的要求。 [1]毛振鋒,王繼安,汪強等.單片電流模式降壓型DCDC轉換器的設計[J].微處理機,2006(3):7-10. [2]鄧莉.升降壓雙通路電荷泵轉換器的研究與設計[D].浙江大學,2007. [3]曹香凝,汪東旭,嚴利民.DC-DC電荷泵的研究與設計[J].通信電源技術,2004,12(5):14-16. [4]徐冬,唐禎安.一種用于馬達驅動芯片的過熱保護電路[J].微電子學,2007,37(6):903-906.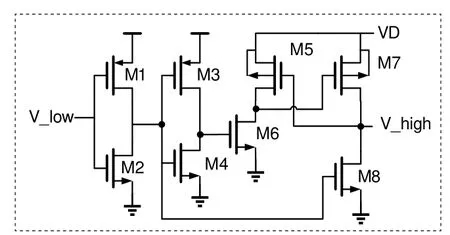
5.驅動電路
6.總結
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06