PWM的整流器無交流電壓傳感器控制
2012-03-27 02:38:42張宏杰
常熟理工學院學報 2012年10期
張宏杰
(健雄職業技術學院機電工程系,江蘇太倉 215411)
PWM的整流器無交流電壓傳感器控制
張宏杰
(健雄職業技術學院機電工程系,江蘇太倉 215411)
針對采用虛擬磁鏈定向控制策略的PWM整流器無交流電壓傳感器控制中存在的由積分環節帶來的一系列問題,將滑模觀測器(SMO)應用于估測電網電壓角度,利用飽和函數代替傳統滑模觀測器中的符號函數以削弱系統抖振,并對比分析了兩種情況下等效控制信號的頻譜圖,仿真和實驗結果表明,基于滑模觀測器的PWM整流器具有良好的動靜態響應和輸入輸出特性,驗證了所提出的無交流電壓傳感器控制策略的有效性和準確性.
滑模觀測器;PWM整流器;無交流電壓傳感器;矢量控制
1 引言
三相電壓型PWM整流器(VSR)作為一種“綠色”電能變換器,可實現網側電流正弦化、單位功率因數運行及能量雙向流動等功能[1],在高性能變流系統中獲得廣泛應用的PWM整流器常采用電壓定向控制(VOC),需要檢測電網電壓、輸入電流和直流母線電壓,由于采用的傳感器較多,增加了系統的成本,也帶來了相應的檢測誤差和復雜性[2].無電網電壓傳感器控制方式的實現方案主要有直接功率控制[3]和矢量控制[3-5],前者類似于交流調速中的轉矩控制,存在著開關頻率不固定、需要高速模數轉換器等不足.實際運用中多采用虛擬磁鏈定向的矢量控制,通過估計虛擬磁鏈間接獲得坐標變換中所需要的電網電壓角度信息.傳統虛擬磁鏈觀測方法使用純積分環節,存在因積分初值選取不當造成的直流漂移問題.文獻[2]采用一階低通濾波器代替純積分環節,雖然磁鏈的觀測結果不再依賴積分初值,但仍存在幅值和相位誤差.文獻[4]采用帶飽和限幅反饋環節的積分器代替純積分,利用限幅值消除直流偏移,但是一階低通濾波器的引入會帶來信號的延時問題.文獻[5]采用兩個低通濾波器代替純積分環節可以使得輸入信號幅值無差且無相移,但是結構復雜,參數不宜整定.
滑模觀測器(SMO)由于其魯棒性強、動態響應快、易于工程實現等優點,在無位置傳感器交流調速系統中得到了廣泛的應用[6-7].本文結合PWM整流器的數學模型,利用觀測電流和實測電流之間的偏差構建滑模平面,當滑模發生運動時觀測器的等效控制信號中包含了電網電壓信息,以此直接估計電網電壓角度,避免了虛擬磁鏈控制中純積分帶來的一系列問題.相比較調速系統中觀測信號的頻率隨轉速變化而言,電網電壓頻率固定,觀測器的結構更簡單,得到的角度精度更高,動態響應更快.為了削弱系統的抖振,采用飽和函數替代傳統滑模觀測器中的符號函數,具有較高的辨識精度.仿真和實驗結果驗證了所提方法的有效性與正確性.
2 無交流電壓傳感器矢量控制系統
2.1 αβ坐標系下PWM數學模型
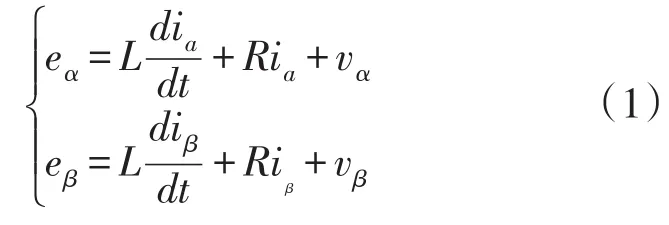
三相電壓型PWM整流器主電路如圖1所示,其中ea、eb、ec分別為三相電網電壓,L是進線電抗器的電感,R為線路與電抗器的等效電阻,Udc為直流母線電壓.若三相電網電壓平衡,PWM整流器在α-β坐標系下電壓方程為
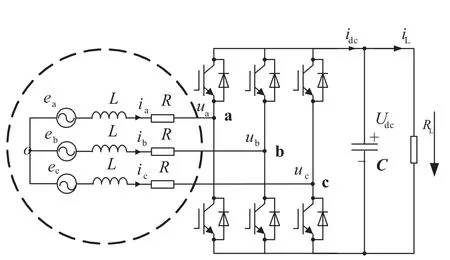
圖1 三相電壓源型PWM整流器的主電路
式中
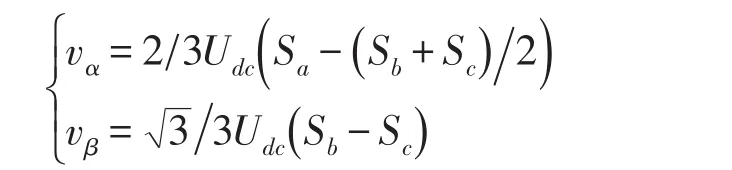
Sa,Sb,Sc是三相橋臂開關函數:其值為1時表示橋臂上管開通,下管關斷;為0表示橋臂下管開通,上管關斷;eα、eβ,iα、iβ分別為電網電壓和電流的α、β分量.
2.2 滑模觀測器設計
將式(1)寫成狀態方程形式

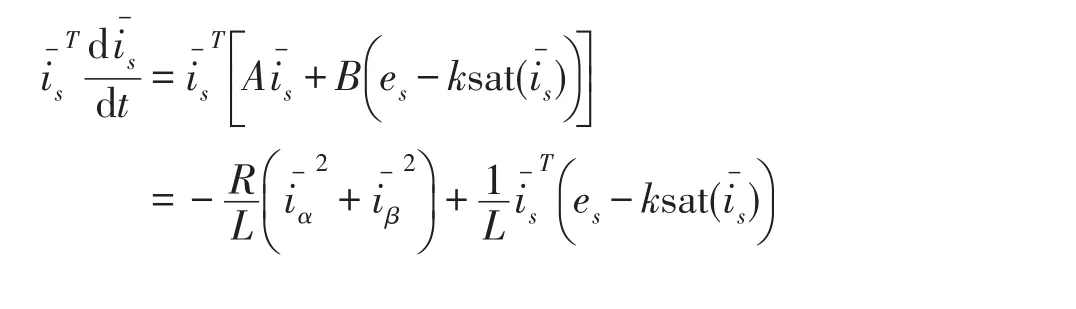
式中vs=[vα,vβ]T,es=[eα,eβ]T.根據滑模變結構控制的基本理論[7],切換函數選取觀測電流和實測電流之間的偏差,采用常值切換控制方式且利用飽和函數代替符號函數削弱抖振,構造滑模觀測器如下:

式中
由式(3)減式(2)可得觀測器電流誤差方程為:


式中
滑模存在條件為k>|es|,當系統運動經過有限時刻到達切換面后,根據等效控制理論[10-11]可得

電網電壓角度信息可由下式估算得到

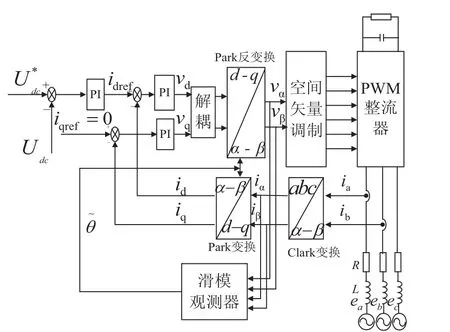
圖2 基于滑模觀測器的PWM整流器矢量控制框
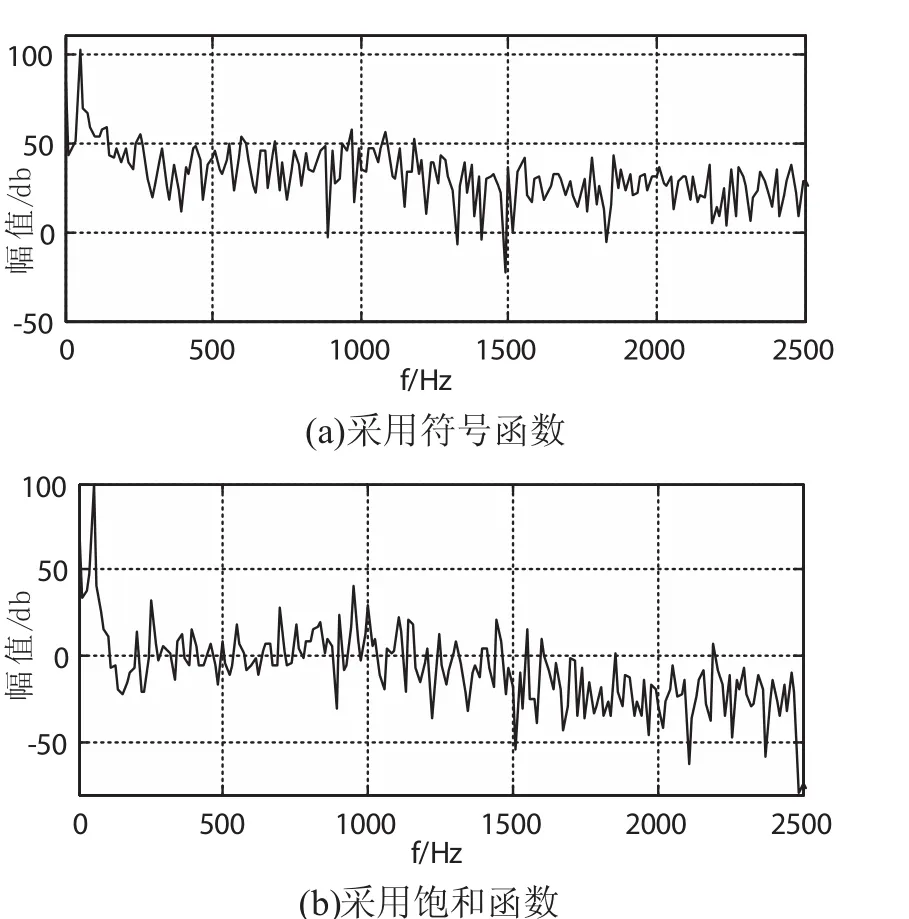
圖3 等效控制信號頻譜
2.3 PWM整流器矢量控制
圖2為基于滑模觀測器的PWM整流器矢量控制系統框圖.電網電壓角度信息通過滑模觀測器估算得到,采用電網電壓定向的控制策略,直流電壓偏差信號經PI調節器后作為d軸電流給定;d、q軸電流偏差信號經過兩個電流調節器和解耦控制后經坐標變換作為空間矢量調制的給定.為驗證所提出觀測器的有效性,實驗中采用霍爾電壓傳感器用于獲得準確的角度信息并和估算出的角度進行對比.
3 仿真及實驗研究
為驗證上述采用滑模觀測器估計電網角度信息的無交流電壓傳感器控制策略的可行性,在Matlab/Simulink環境下搭建了無電網電壓傳感器控制的PWM整流器仿真模型,并對傳統符號函數和采用飽和函數下的滑模觀測器等效控制信號的頻譜進行了對比仿真分析.仿真參數:進線電抗器電感8 mH,電阻0.5 Ω、直流母線電容2200 μF、直流側負載電阻100 Ω、交流側輸入相電壓有效值30 V,直流母線電壓100 V、器件開關頻率5 kHz.
圖3給出了滑模觀測器等效控制型號的頻譜.由圖3(a)可知,使用符號函數時,等效控制信號中的頻譜復雜,左側第一個峰值為估測電網電壓頻率,其他峰值都是由抖振信號所引起的干擾頻譜,范圍較寬且幅值較大,觀測器無法直接使用.圖3(b)為采用飽和函數后的等效控制信號頻譜,相比較符號函數,飽和函數引入了一個厚度為ε的邊界層,在邊界層內滑模控制是連續的,從而大大削弱了抖振的影響,對高頻分量起到明顯的抑制作用.圖4為利用滑模觀測器估測的電網電壓角度和電網電壓實際角度.由圖可知,觀測器能夠迅速收斂得到電網電壓角度,且穩態精度高無滯后.
根據圖2搭建了基于滑模觀測器的PWM整流器無交流電壓傳感器矢量控制平臺.主電路參數與仿真參數相同,功率器件選擇三菱公司型號為PM25RLA120 的IPM,主控芯片采用TI公司的TMS320F28335.
圖5為實際電網電壓與滑模觀測器估測的電網電壓波形.圖5(a)為實際電壓與滑模觀測器估測的電網電壓,圖5(b)為實際角度與滑模觀測器估測的電網電壓角度.可以看出,估測的電壓波形正弦度良好,抖動影響得到了有效抑制,估測出的角度波形光滑且與實際角度一致無滯后.
圖6是基于滑模觀測控制的PWM整流器直流母線電壓波形.其中圖6(a)為直流母線電壓給定為100 V時,從不控整流到可控整流的啟動過程,可以看出直流母線電壓能夠迅速跟蹤給定且實際電壓與指令電壓相差不太大,啟動過程平滑無超調圖.6(b)所示為PWM整流器啟動和負載突變情況下的直流母線電壓波形,可以看出啟動后3 s負載電阻從100 Ω突減至50 Ω負載電流變大,電壓略有跌落后迅速跟蹤給定電壓,4 s后負載電阻變為100 Ω,負載電流減小,母線電壓略有泵升后迅速跟蹤給定值,動態性能良好.圖6(c)給出了電壓給定值從100 V突變為120 V的直流母線電壓波形.
圖7為網側A相電壓與電流波形,其中圖7(a)給出的是直流電壓100 V時,負載電阻由100 Ω突減至50 Ω時交流側電壓電流波形,可以看出,負載突變時網側電流能夠迅速調整維持功率守恒,且能夠保持單位功率因數下運行.圖7(b)為負載電阻100 Ω,直流母線電壓由80 V突變為120 V時網側電壓電流波形,可以看出在這兩種情況下PWM整流器具有良好的輸入特性和動態響應能力.
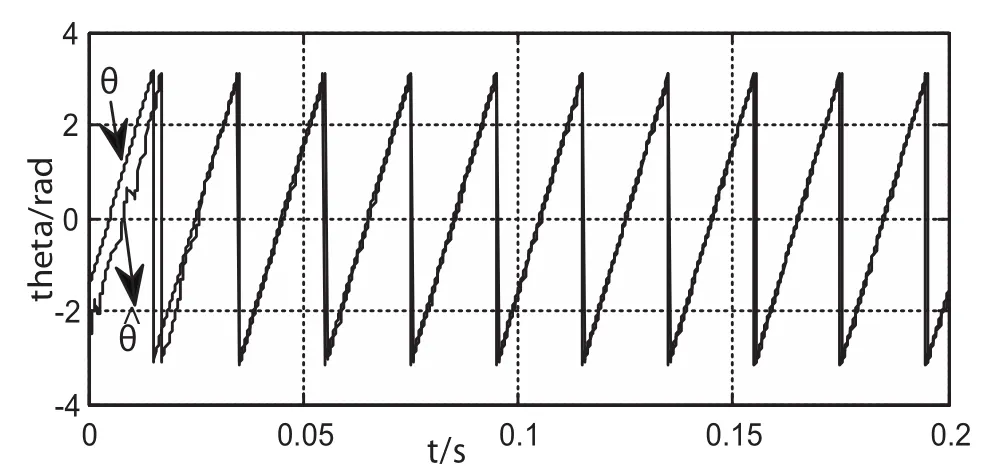
圖4 估計角度與實際角度
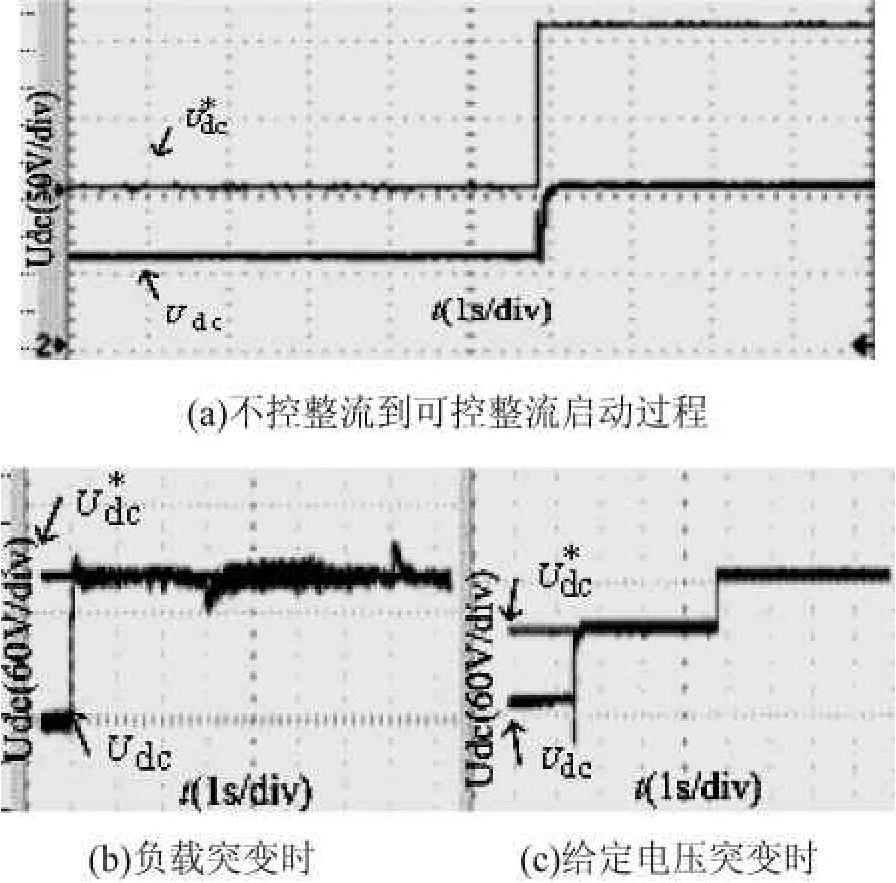
圖6 直流電壓動態響應
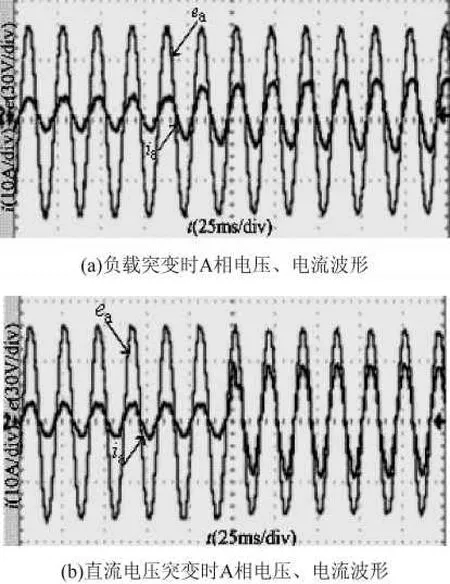
圖7 PWM整流器輸入特性
4 結論
本文將交流調速系統中廣泛應用的滑模觀測器應用到PWM整流器中,用以估計電網電壓角度,實現無交流電壓傳感器矢量控制,結論是:(1)該觀測器能夠準確估測出電網電壓角度信息,且魯棒性強、動態響應快,解決了傳統無電網電壓傳感器控制中純積分環節帶來的一系列問題.(2)使用飽和函數替代傳統觀測器中的符號函數,削弱了固有高頻抖動的影響,提高了角度信息辨識精度.(3)仿真和實驗驗證了使用滑模觀測器的PWM整流器輸入、輸出動靜態特性,實現了無交流電壓傳感器的矢量控制.
[1]伍小杰,羅悅華,喬樹通.三相電壓型PWM整流器控制技術綜述[J].電工技術學報,2005(12):7-12.
[2]趙仁德,賀益康.無電網電壓傳感器三相PWM整流器虛擬電網磁鏈定向矢量控制研究[J].中國電機工程學報,2005,25 (20):56-61.
[3]Toshihiko Noguchi,Hiroaki Tomiki,Seiji Kondo,et al.Direct power control of PWM converter without power-source voltage sensors [J].IEEE Trans on Industry Applications,1998,34(3):473-479.
[4]吳鳳江,汪之文,孫力.PWM整流器的改進虛擬磁鏈定向矢量控制[J].電機與控制學報,2008(05):504-508.
[5]尚喆,趙榮祥,竇汝振.基于自適應滑模觀測器的永磁同步電機無位置傳感器控制研究[J].中國電機工程學報,2007,27(3):23-27.
[6]魯文其,胡育文,杜栩楊,等.永磁同步電機新型滑模觀測器無傳感器矢量控制調速系統[J].中國電機工程學報,2010(33):78-83.
[7]張曉光,安群濤,劉超,等.基于滑模觀測器的無傳感器永磁同步電機矢量控制系統[J].伺服控制,2010(02):37-39.
[8]Hongryel Kim,Jubum Son,Jangmyung Lee.A High-Speed Sliding-Mode Observer for the Sensorless Speed Control of a PMSM[J]. IEEE Transactions on Industrial Electronics,2011,58(9):4069-4077.
[9]Song Chi,Longya Xu.Position Sensorless Control of PMSM Based on a Novel Sliding Mode Observer over Wide Speed Range[C]. Power Electronics and Motion Control Conference,2006(2):1-7.
[10]Paponpen,Konghirun K M.An Improved Sliding Mode Observer for Speed Sensorless Vector Control Drive of PMSM[C].Power Electronics and Motion Control Conference,2006(2):1-5.
[11]蘇健勇,李鐵才,楊貴杰.PMSM無位置傳感器控制中數字滑模觀測器抖振現象分析與抑制[J].電工技術學報,2009(08):58-64.
Vector Control of PWM Rectifier without AC Voltage sensors
ZHANG Hong-jie
(Department of Mechanical and Electrical Engineering of CSI,Taicang 215411,China)
To solve the problems caused by integer which were used in virtual flux oriented control of PWM rectifier without AC voltage sensors,a sliding mode observer(SMO)was designed to estimate grid voltage angle. This paper analyzes the principle,designs steps of SMO.and uses saturated function instead of symbols function in traditional sliding mode observer to weaken the system chattering.The paper also analyzes the equivalent control signal spectrum diagram in the two cases.Simulation and experimental results show that PWM rectifier has a good dynamic/static response and input/output characteristics and verifies the validity and feasibility of the proposed AC voltage sensorless control strategy.
sliding mode observer;pwm rectifier;ac voltage sensorless;vector control
TM301
A
1008-2794(2012)10-0082-05
2012-09-08
張宏杰(1969—),男,江蘇東臺人,講師,碩士,研究方向:傳動控制.
