基于PLC自動風門的程序設計
2012-04-10 02:24:16萬仁保張永選
制造業自動化 2012年16期
萬仁保,張永選
WAN Ren-bao,ZHANG Yong-xuan
(江西經濟管理干部學院,南昌 330088)
0 引言
保持通風是煤礦井下安全生產的一個重要的環節,通風系統中的很重要的部分是風門。隔離進風系統和回風系統是風門設計者要注意的主要問題,使得風道內的通行不受影響是個很重要的前提。很長時間里都是采用人工的風門或者是比較簡單的風門比如說電動風門、自撞式風門等等。傳統的風門本身的結構簡單易實現,但是有一定的缺點:自動化不高,易損壞。一旦風門系統損壞,就造成在礦井下的運輸效率降低,影響通風質量。隨著煤礦開采的自動化程度越來越高,風門的自動化要求也越來越高,為此我們討論如利用簡單的電路并輔以軟件實現自動風門控制。
礦井下需要具有安全性的自動風門來保持礦井的通風、安全和運輸。自動風門的可靠性要求很高,目前礦井下運用的情況而言,由于出現很多的控制系統問題如自動控制系統并沒有預想的可靠度,自動風門控制系統本身的可靠性差,系統故障經常發生,故而大多數被拆除。PLC帶來了礦井下自動風門的控制系統實現了風門的自動化,保證了系統的穩定性可靠性。提高了生產效率,降低了安全隱患。
1 工作原理
本文中的自動風門系統中有風門1、2兩道風門,我們記為:FM1、FM2。圖中的人行小門是在安裝于風門的手動開啟的門。礦車位置傳感器用于接收礦車位置信息,安裝于礦車的兩側軌道之上,左側表示為S1-1到S8-1,右側表示為S1-2到S8-2。由門位信號來進行判斷風門的開啟是否到位。用來判斷風門的開關與否的是人行門開關傳感器;電磁閥控制的人行門能否開啟由人行門指示燈來進行指示。絞車司機通過觀察風門運行顯示情況來決定進行通行與否,這個顯示系統并不受PLC控制。強制開關是在有事故發生時,可對風門立即進行動作。
2 自動風門的程序設計
2.1 輸入和輸出分配
位置信號S1-1到S8-1對應的輸入寄存器是I0.0到I0.7;I2.0到I2.7對應的是右側位置S1-2到S8-2。I1.0-I1.3對應的分別是風門FM1開,風門FM2開,風門FM1關,風門FM2關。風門1、2強制開啟分別由I3.0和I3.1來表示。I1.4和I1.5信號分別表示是人行門1和2的開啟與關閉。
輸出寄存器Q0.0和Q0.1分別表示的風門FM1的開關控制;Q0.2和Q0.3分別表示的風門FM2的開關控制。Q0.4表示的是人行小門1,Q0.5表示門2的指示燈的控制。控制Q0.6的是液壓;剎車控制是Q0.6。系統報警有聲和光分別表示為Q1.0-Q1.1。
2.2 程序分析
本文控制系統分為兩種工作狀態:程序工作狀態和人工工作狀態。當風門的強制開關都處于低電平是為自動,即是在系統無故障時的工作狀態,服務子程序來控制風門的開啟、閉合,此時加入一些子程序來提高系統的可靠性。比如說有:對手動小門的開關進行檢測,對有故障時進行報警的程序。在手動狀態時,強制開關之少有一個被按下,系統會進行工作并且不會產生任何的報警。
2.3 程序的設計
這里我們采用的是梯形圖來進行設計程序的編寫,主程序如圖1所示。
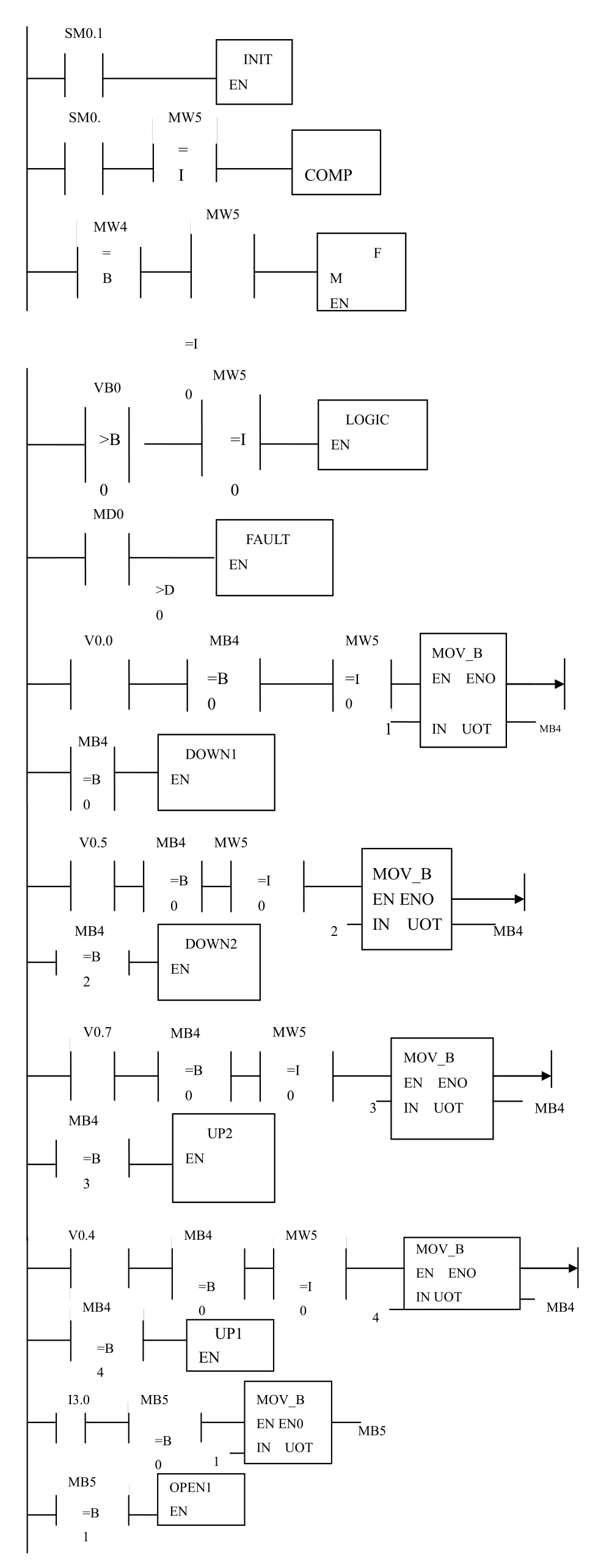
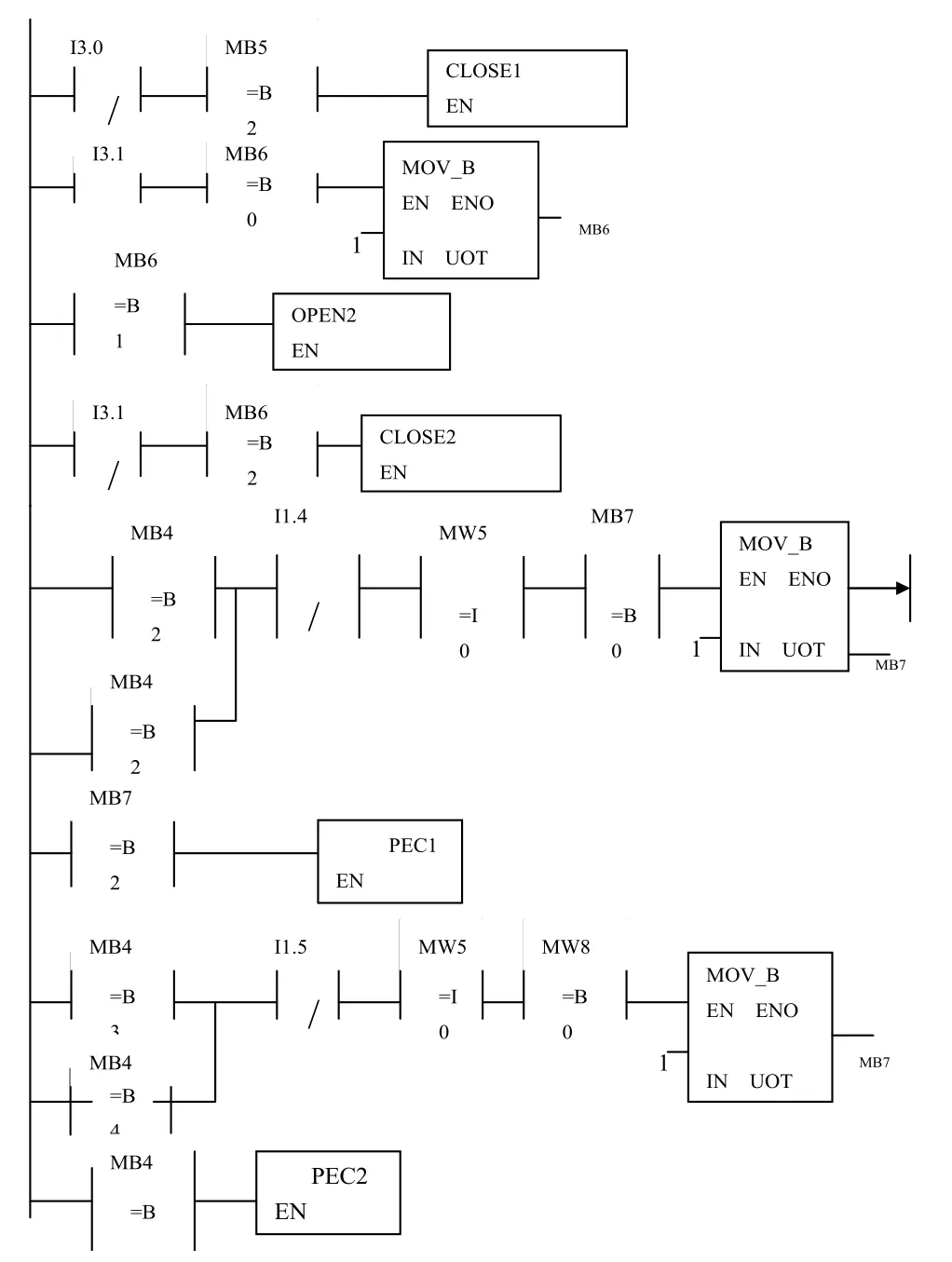
圖1 程序梯形圖
主程序的設計用到的是輸入寄存器I,存儲器M和V。功能程序調用的字節有MB4-MB8,S1-S8的信號分別對應V存儲器中的V0.0-V0.7。由于有左右兩側的位置傳感器,PLC把檢測到的信號與相關的設定進行比較,并在相同時,將它們的輸入轉換為在存儲器V中的狀態,即將S1-S8的信號轉換為V0.0-V0.7。系統在正常運行時,一旦故障標志位出現了置位,如果對應的是M1.0-M1.7,則說明位置傳感器出現了故障,需要及時修復。
2.4 子程序設計
2.4.1 服務功能程序
礦車如何進行通過風門,就是礦車服務子程序的設計過程。具體來講,風門有兩個FM1、FM2,我們將礦車下風門FM1的程序叫做D1,叫礦車下風門FM2的程序叫做D2;把礦車上升通過風門1的程序叫U1,把礦車上升通過風門2的程序叫做U2。對于各種情況我們來作下分析。對于礦車的位置傳感器來檢測礦車的位置,當MB4=0時,則表示在S1-S8區域里沒有礦車。一旦在MB4=1時,表示在這段時間里,有礦車接近,于是進入了D1子程序。
子程序中,先判斷風門FM2是否關閉,為了保持有一道門始終關閉。當風門FM2沒有關好時,I1.3就不為零,此時M0.3置位表示風門FM2未關閉故障。同樣礦車到達S2時,對于風門FM1來說,若未關閉,則I1.0不為零,顯示的是風門FM1沒有及時打開,有故障MD0>0。一旦系統有故障時,系統自動轉入故障處理程序。在子程序中,若對應的寄存器一直被置位此時人行門上的人行指示燈提示故障,人行小門則被禁止開啟。在下風門子程序D1工作流程,在程序的掃描過程中,若在下降D1程序中檢測到S5信號,MB1由1變為0時,就跳出下降程序D1進入主程序,MB1被置為2時,從而進入主程序。在下降程序D2中繼續順序執行,如果S7檢測到信號時,則在系統作出延時后退出該程序。UI和U2工作原理相同。
2.4.2 監視子程序
監視人行門1和人行門2的程序我們分別表示為P1和P2。對于禁止打開人行門時,門上的通行指示燈為紅燈,同時Q0.4置位。運行監視程序P1的條件是在門1被違章開啟,檢測到后主程序將MB7置為1時。監視子程序運行,MB4的值先賦給VB1中同時將MB4置0,表示故障的M0.6置位,礦車服務程序和系統主程序同時暫停工作。
有違章打開人行門時,系統轉入故障子程序。一旦故障消除,即人行門關閉的時候,MB7置0,M0.6復位,MB4恢復以前值,轉入系統正常運行狀態。對于風門FM2的監視程序P2而言,其工作原理與風門FM1監視程序P1相同,MB8置為1時,子程序被調用,對應的故障標志位為M0.7。
2.4.3 自行檢測程序
對風門開啟與否的狀態進行檢測和對礦車信號進行的檢測統稱為自檢子程序,其中把前者表示為F,把后者表示為L。系統在掃描檢測無礦車狀態信號時,風門1和風門2閉合。一旦在掃描時發現風門1沒關閉時,系統將風門1故障標志位置位MD0>0,系統轉入故障處理。
對于礦車信號邏輯狀態檢測子程序L,檢測V0.0到V0.7的變化是否符合系統的要求。在礦車上風門時,系統要求V0.7到V0.0由0到1再到0進行變化,下風門時要求V0.0到V0.7也是進行如此規律的變化。若在其中遺漏了一項變化,比如說在上風門時檢測未檢測到有一項未變化,則系統置位用作傳感器邏輯故障標志位的M0.0,系統自動進行處理故障處理。
2.4.4 系統故障程序
在系統出現故障時,系統自動進行處理故障處理。在系統進入故障處理子程序時,首先判斷故障的嚴重程度。不同的故障的嚴重程度不一樣,系統將故障分為三個等級,一等級時系統可以正常運行,二等級時系統可以由絞車的司機將絞車進行停止,三等級時系統緊急停止絞車,切斷絞車的電源,根據系統對于故障的的分級進行不同的處理。
對于以上不同的子程序出現的故障而言也有著相對應的處理方式。如在礦車服務時,MW1>0時系統進入故障處理程序,處理的方式是采用第一等級的方式。系統會顯示報警,提示有故障,但是正常運行。如果一旦M1.0置位,表示的S1-1故障,進入故障處理程序,系統采用的是第二等級的處理方式進行報警。如果執行程序時一旦出現風門沒有開的故障我們系統采用的是立即停止運行即系統最嚴重的處理方式。
3 手動工作
本文設計的基于PLC的自動風門的系統工作狀態:一種是程序控制工作狀態,一種是手動工作狀態。程序的設計主要是應用于自動工作狀態,而對于系統有故障時,或有事故發生時,應采用手動工作。只有風門的強制開啟和關閉的相關子程序可以工作,系統不進行監視礦車的信號,不在進行報警。當開關1按下時,系統將風門進行開啟,一旦此開關復位時,風門就被系統關閉。
4 結束語
以上是PLC控制的自動風門的分析,風門在無故障情況下的自動控制和在有故障時的手動控制,系統對于不同的情況有著不同的處理。實現了風門可以進行軟件的自動開啟與關閉,也能通過傳感器進行檢測風門是否出現故障。通過檢測礦車的位置,來進行發現其是否有故障。自檢程序可以發現風門在開關時是否出現故障,也可以發現是否遺漏測試點信號的處理。對于故障進行分等級處理可以提高系統對于故障處理能力。
[1] 嚴儉祝,蔣曙光. 煤礦常閉風門組的PLC自動控制系統[J]. 煤礦安全,2002(10).
[2] 張衛國. 對煤礦井下風門自動控制的構想[J]. 礦業安全與環保,1992(2): 39-40.
[3] 廉自生,唐德茂,趙福祥. KHFM-I型自動風門研制[J]. 煤礦機械,2001(7): 42-43.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
人大建設(2019年12期)2019-05-21 02:55:44
電子制作(2018年11期)2018-08-04 03:25:42
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國衛生(2015年3期)2015-11-19 02:53:32
