一種改進(jìn)的非相參積累方法在雷達(dá)跟蹤中的應(yīng)用
2012-04-14 01:10:06王曉燕
科技視界 2012年12期
王曉燕
(中國電子科技集團(tuán)公司第20研究所 陜西 西安 710068)
0 引言
線性調(diào)頻(LFM)信號是應(yīng)用極為廣泛的一種信號體制,這種信號最大的特點就是可以使雷達(dá)同時獲得遠(yuǎn)的作用距離和高的距離分辨率[1]。該體制雷達(dá)的工作原理是首先發(fā)射一串線性調(diào)頻信號,而接收機(jī)對來自目標(biāo)后向散射的回波信號進(jìn)行匹配壓縮處理,得到具有sinc包絡(luò)的簡單脈沖串,由于壓縮脈沖的等效時寬取決于信號的調(diào)頻帶寬,從而可以獲得比發(fā)射脈沖高得多的距離分辨能力;同時,發(fā)射寬脈沖信號提供了雷達(dá)探測遠(yuǎn)距離目標(biāo)所需的能量。因此,線性調(diào)頻信號是現(xiàn)代雷達(dá)中經(jīng)常采用的一種發(fā)射信號形式。實際上為了對微弱雷達(dá)目標(biāo)進(jìn)行可靠檢測,還需要對壓縮輸出后的Sinc脈沖進(jìn)行積累,以進(jìn)一步提高信號檢測所需的信噪比[2]。對于大多數(shù)運動目標(biāo)而言,其回波的起伏將明顯破壞相鄰回波信號的相位相參性,因此就是在雷達(dá)收發(fā)系統(tǒng)相參性很好的條件下,起伏回波也難以獲得理想的相參積累[3]。從而導(dǎo)致積累周期內(nèi)回波信號能量難以有效進(jìn)行相參積累,造成目標(biāo)回波幅度時高時低的現(xiàn)象,在跟蹤處理中,就可能出現(xiàn)對跟蹤目標(biāo)的跟丟現(xiàn)象,嚴(yán)重影響雷達(dá)目標(biāo)跟蹤,檢測性能。采用非相參積累可基本解決該問題,但信噪比會降低。但是,在很短的時間內(nèi),目標(biāo)的回?fù)苄盘栐谙嗤木嚯x單元上是相參的,可以有效地進(jìn)行相參積累,通過以上分析,結(jié)合工程實際應(yīng)用,本文對非相參積累進(jìn)行了改進(jìn),采用相鄰周回波相參積累,然后再進(jìn)行非相參積累的方法,這樣,既解決了目標(biāo)運動造成的不能有效相參積累,又使積累后信噪比比傳統(tǒng)非相參積累高,有效提高了雷達(dá)目標(biāo)跟蹤,檢測性能。原理框圖如圖1。

圖1 改進(jìn)相參積累方法原理圖
1 波形分析
線性調(diào)頻信號為

其中,φ 為隨即初始相位,f0為信號載頻,ui(t)為發(fā)射信號的復(fù)包絡(luò)

其中,T為脈沖寬度,Tp為脈沖重復(fù)周期,K為調(diào)頻斜率。對接收到的目標(biāo)的后向散射回波信號進(jìn)行匹配壓縮處理,得到一個具有Sinc包絡(luò)的簡單脈沖,然后對壓縮輸出后的Sinc脈沖進(jìn)行積累,以進(jìn)一步提高信號檢測所需的信噪比,即提高了雷達(dá)的探測,跟蹤等性能。
脈間相參積累處理是在不同脈沖的同一采樣位置處進(jìn)行的,由于脈沖包絡(luò)走動的影響,假設(shè)第一個脈沖采樣位于包絡(luò)最大峰值處,那么隨著目標(biāo)的運動,,以后每個脈沖的采樣逐漸偏離最大峰值,從而導(dǎo)致相參積累的效果大大下降[4],在積累周期內(nèi),就可能出現(xiàn)回波能量不能有效進(jìn)行相參積累,造成相參積累后目標(biāo)回波能量不穩(wěn),對于跟蹤雷達(dá),可能因此而引起跟蹤處理時跟蹤不穩(wěn)定,從而嚴(yán)重影響系統(tǒng)檢測和跟蹤性能;對于非相參積累,是能量上的積累,只要在積累周期內(nèi),目標(biāo)沒有移出一個距離單元,目標(biāo)能量就會得到有效積累,但在目標(biāo)能量積累的同時,噪聲能量也提高了,因此信噪比降低了;應(yīng)用本文提出的積累算法,將有效的對目標(biāo)能量進(jìn)行了積累,且信噪比不會受到大的影響。
2 仿真實驗
下面對本文提出的算法進(jìn)行仿真,并與相參積累和非相參積累的性能進(jìn)行比較。仿真參數(shù)為:以點目標(biāo)為例,發(fā)射線性調(diào)頻信號的時寬τ=50us,信號帶寬為5mHz,信號重復(fù)周期為Tr=500us,噪聲為正態(tài)分布的隨機(jī)噪聲。

圖2 線性調(diào)頻信號
對于固定目標(biāo),相參積累和非相參積累的性能比較如圖3、圖4所示。

圖3 目標(biāo)主瓣比較

圖4 噪聲比較
從圖3、圖4可看出,對于固定目標(biāo),相參積累對信噪比的改善效果很好,非相參積累在目標(biāo)能量積累的同時,噪聲能量也有一定的積累,因此信噪比降低。但是,當(dāng)出現(xiàn)由于目標(biāo)運動、系統(tǒng)或其他不穩(wěn)定因素引起回波相位相參性不好而造成相鄰回?fù)芟鄥⑿阅茌^差,不能有效進(jìn)行相參積累時,即在跟蹤波門內(nèi)采到的和路和差路信號初相不穩(wěn),本文提出的改進(jìn)非相參算法會明顯優(yōu)于傳統(tǒng)的相參算法和非相參算法。下面圖5、圖6給出了這種情況下三種算法的仿真結(jié)果。

圖5 目標(biāo)主瓣比較
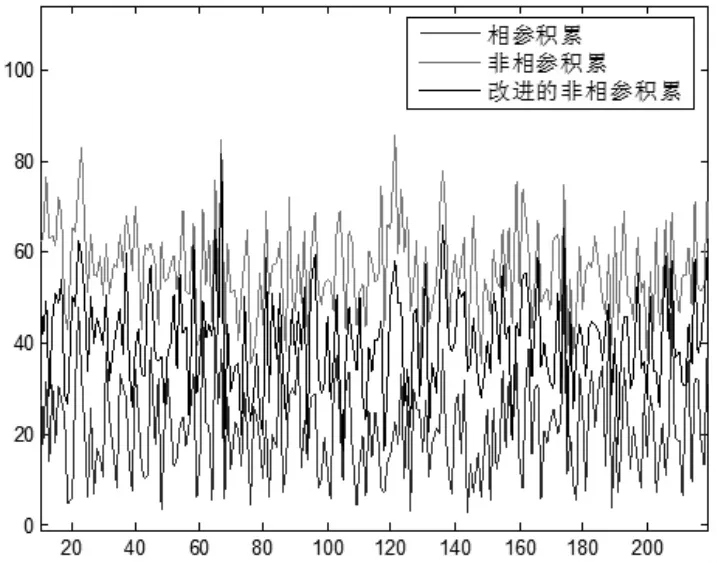
圖6 噪聲比較
從圖5、圖6比較可以看出,雖然相參積累后的噪聲比非相參積累后的噪聲低很多,但是,在信噪比滿足系統(tǒng)檢測性能要求的情況下,如果由于目標(biāo)、系統(tǒng)或其他不穩(wěn)定因素引起信號初相不穩(wěn),相參積累時,信號主瓣積累后也會不穩(wěn)定,即表現(xiàn)為信號時強(qiáng)時弱,甚至出現(xiàn)目標(biāo)分裂的現(xiàn)象,這種情況下可能會出現(xiàn)信號強(qiáng)度低于系統(tǒng)跟蹤門限,嚴(yán)重影響系統(tǒng)的穩(wěn)定跟蹤性能;此時,非相參積累就顯示出其的優(yōu)越性,因為非相參積累對主瓣的影響不大,因此對系統(tǒng)跟蹤性能影響很小,從仿真結(jié)果可以看出,改進(jìn)的非相參算法雖然有一定的能量損失,但信噪比仍然比傳統(tǒng)非相參算法的大。
在工程應(yīng)用方面,利用FPGA+DSP方式,其中FPGA進(jìn)行邏輯控制,DSP進(jìn)行算法實現(xiàn),該處理方法已經(jīng)得到了工程應(yīng)用和驗證,其計算量基本與相參算法和非相參算法相當(dāng),因此實現(xiàn)也很簡單。
3 結(jié)束語
通過以上仿真結(jié)果的比較可以看出,當(dāng)由于目標(biāo)運動、系統(tǒng)或其他不穩(wěn)定因素引起回波初相不穩(wěn)而造成能量不能有效進(jìn)行相參積累時,會嚴(yán)重影響雷達(dá)跟蹤和檢測性能,而非相參積累會降低信噪比,在這種情況下改進(jìn)的非相參積累算法體現(xiàn)出其優(yōu)越性,并通過仿真證明其可以滿足系統(tǒng)跟蹤檢測性能。
[1]林茂庸,柯有安.雷達(dá)信號理論[M].北京:國防工業(yè)出版社,1984.
[2][4]朱永鋒,李為民,等.Chirp雷達(dá)對高速運動目標(biāo)有效相參積累的算法研究[J].系統(tǒng)工程與電子技術(shù),2004,26(10):1396-1399.
[3]丁鷺飛,耿富錄,陳建春.雷達(dá)原理[M].4版.北京:電子工業(yè)出版社,2009.
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
