基于LiDAR數據和航空影像的建筑物三維重建技術研究
2012-04-19 03:25:32孫華余銳歐陽光輝李誠
城市勘測 2012年2期
孫華,余銳,歐陽光輝,李誠
(仙桃市勘測設計院,湖北仙桃 433000)
基于LiDAR數據和航空影像的建筑物三維重建技術研究
孫華?,余銳,歐陽光輝,李誠
(仙桃市勘測設計院,湖北仙桃 433000)
在我國大力開展數字城市建設的大背景下,精確地獲取建筑物特征點的三維空間信息和重建建筑物三維模型技術是構建城市三維模型的難點和重點,因此在今后相當長的時期內基于融合多源數據的建筑三維重建相關技術研究將是熱門的前沿課題。
機載LiDAR系統;建筑物三維重建
1 引 言
我國的數字城市建設是全球信息化建設的必然發展趨勢,是全面提高測繪技術服務于國民基礎建設能力的重要體現。在此大發展背景下,基于融合多源數據的城市三維模型重建相關技術研究成為現階段最熱門的前沿課題,而精確地提取建筑物的三維空間信息和重建其三維模型是城市三維模型重建相關技術研究的難點和重點[1]。
目前建筑物三維信息的獲取方式和三維模型的重建手段多種多樣,但缺乏融合多源城市空間數據的智能化、自動化處理系統。數字城市需要將城市的數字地面模型、全要素地形圖(1∶1 000)、城市三維模型、城市地理信息系統等多源數據自動化融合在一個基礎空間地理信息系統中。因此,高自動化程度的多源數據融合系統成為測繪科研與生產應用部門必須解決的首要問題。
2 機載LiDAR系統的基本原理
機載LiDAR系統基本工作原理可以概述為:利用安裝在飛機下端的激光掃描儀發射激光束,根據精確記錄發射與反射的時間差和激光光速恒定的原理測定激光脈沖發射點到建筑物反射激光腳點的斜距S,聯合與此同步的IMU測定飛機的姿態參數(航向角、俯仰角和側滾角)和GPS測定飛機的空間直角坐標(Xt,Yt,Zt),就可以利用極坐標定位原理實時計算出激光腳點的空間直角坐標(Xm,Ym,Zm)。同時,利用安裝在飛機下端的高分辨率數碼相機可以同步獲取測區的高分辨率的彩色數碼影像[5]。
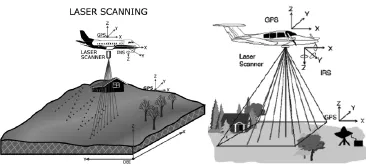
圖1 機載LiDAR系統工作示意圖
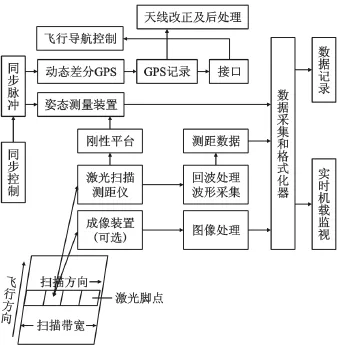
圖2 機載LiDAR系統構成示意圖
3 LiDAR數據的預處理
對于測區的地形點云數據來說,相鄰兩點之間就會有高差,距離越小高差越小,因此我們可以用坡度值來表示地形起伏的程度[6]。
圖3 相鄰點云之間的坡度圖
將空間中相鄰的離散點云A和B連接,它們組成線段在空間的坡度值就可以用tgθ來表示,A和B兩離散點云的坡度值tgθAB的計算公式如下:

從1式可以推算出:當AB兩點水平距離值恒定時,坡度值隨高差的增大而增大。當AB兩點高差恒定時,坡度值隨距離的增大而減小。根據兩點高差與距離的比值表示坡度的原理,就可以利用兩點之間的坡度表示地形的起伏程度。根據地形細節的表達程度自定義坡度閾值M和最小間距D,計算相鄰兩點之間的tgθ。若大于M時,就將兩點視為特征點進行保留。若tgθ小于M時,計算兩點各與前后兩點之間的距離,如果兩點與前后兩點之間的距離都小于自定義最小間距D,就刪除兩點。如果兩點與前后兩點之間的距離有一個或者都大于D,則將其作為特征點保留。按順序直至將四叉樹中所有節點內的點簡化完。
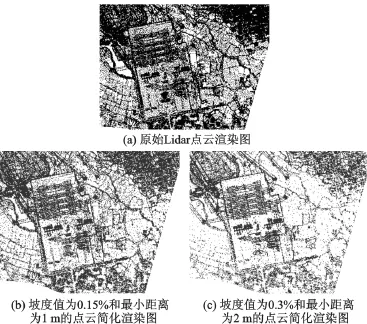
圖4 點云渲染圖對比
圖4(a)是原始LiDAR點云渲染圖,由于原始Li-DAR點云具有數據量大、冗余點多的特點,會造成點云渲染花費的時間較長。而圖4(b)和4(c)是基于不同坡度值與最小間距的簡化LiDAR點云渲染圖,從圖4(c)中可以看出,雖然數據量和密集度都明顯降低,但建筑物和其他地物的關鍵特征點還是被完好的保留。圖4 (b)LiDAR的點云數據量約占原始點云數據量的1/12,圖4(c)點云數據量約占原始LiDAR點云數據量的1/48。此算法可以根據表達建筑物不同層次細節要求,控制坡度和最小間距的閾值大小。運用此算法對原始LiDAR點云進行數據簡化加快了點云數據預處理向自動化、智能化、高效化、低成本化方向發展的進程。
4 基于LiDAR數據和航空影像的建筑物三維重建
融合LiDAR數據和航空影像進行建筑物三維重建,提取的建筑物輪廓遠比基于單一航空影像數據或LiDAR數據提取的建筑物輪廓更接近真實和更科學。因此研究基于LiDAR數據和航空影像的建筑物三維重建相關技術具有十分重要的科學研究價值和實際應用價值。
4.1 LiDAR數據與航空影像的配準和融合
隨著機載LiDAR技術的不斷發展,為了提高建筑物重建模型的精度和真實性,機載LiDAR系統集成高分辨的數碼相機以實現獲取地物三維空間信息的同時也能獲取其對應的亮度、強度、紋理等信息[3]。
(1)LiDAR數據和航空影像的粗配準
采用多選特征點代入坐標系轉換多項式中計算粗配準參數。在計算粗配準參數之前可以采用多次擬合分析排除影響坐標系轉換多項式求值精度的特征點。利用計算的粗配準參數將航空影像轉換到LiDAR數據的坐標系下,為后續基于航空影像和LiDAR數據粗配準的前提下實現LiDAR點云融合影像光譜信息提供有利的條件[6]。
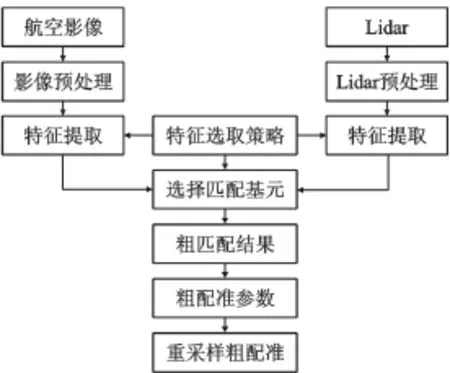
圖5 基于特征的圖像匹配方法流程圖

圖6 LiDAR數據和航空影像疊加圖
這些特征點勻均的分布在全測區中方便人眼判別的建筑物特征點之上,相對于選取LiDAR數據中建筑物特征點而言,航空影像中的建筑物特征點較容易人眼辨視。設預處理后的LiDAR數據在攝影測量坐標系下的坐標為(LX,LY),預處理后航空影像數據在像平面坐標系的坐標為(PX,PY),通過坐標系轉換多項式將兩個坐標系進行匹配:
將選取的特征點代入式(2)來計算粗配準參數(a1,b1,a2,b2,△x,△y),在計算粗配準參數之前可以采用多次擬合分析排除影響坐標系轉換多項式求值精度的特征點,利用這6個粗配準參數將航空影像所在的像平面坐標系轉換到LiDAR數據的攝影測量坐標系下。
(2)LiDAR數據和航空影像的融合
由HIS彩色空間變換方法能較容易的對呈非線性分布的RGB圖像實現識別和定量操作,本文采用HIS彩色空間變換的方法來實現LiDAR點云與影像像元的融合。
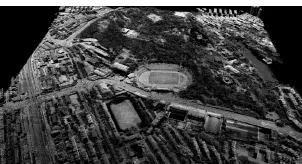
圖7 LiDAR數據和航空影像融合圖
根據航空影像的實際情況和分類要求,調整色度H、飽和度S、亮度I等參數的百分比以達到滿足地物過濾與分類的要求。將調整后的百分比參數與LiDAR數據融合并采用HIS反變換生成具有影像紋理、色彩等屬性的LiDAR點云數據。融合影像數據的LiDAR點云對幾何形狀和周圍環境比較復雜地物辨識能力增強。LiDAR點云融合影像的光譜信息可以較方便的實現數據的過濾與分類,最終達到提高建筑物三維重建的真實性和精確性。
4.2 建筑物輪廓特征點三維信息的提取原理
由于激光脈沖發射頻率的限制,發生激光腳點正好打在建筑物輪廓特征點上的概率較小,因此基于Li-DAR數據的空間分布關系生成的建筑物頂部粗略輪廓一般在真實輪廓的內部。利用這個原理,可以把離粗略輪廓最近并且在其外側的矢量線段當作真實輪廓的邊緣線段。搜索距離粗略輪廓最近的矢量線段,可以運用點到直線的距離公式來判別:
利用建筑物墻體與頂面交界部分的邊緣線段相鄰垂直、相對平行的原理作為其粗略輪廓特征點的約束平差條件,采用附帶約束條件的間接平差可以將墻體與頂面交界部分的粗略輪廓特征點幾何糾正到最優輪廓特征點之上,進而得到最優建筑物的輪廓模型。
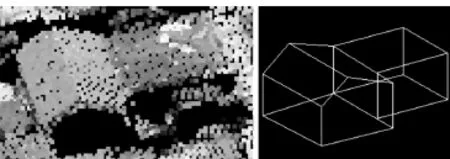
圖8 基于融合數據的建筑物輪廓提取圖
本節以典型人字型建筑物模型來介紹建筑物墻體和頂部非交界部分特征點的糾正原理。
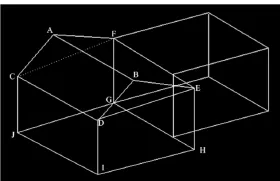
圖9 建筑物特征點之間的關系示意圖
利用建筑物墻體底面特征點與頂部特征點之間的空間關系,可以確定墻體底部特征點G、H、I、J的平面坐標分別與建筑物墻體頂部特征點F、E、D、C的平面坐標相等。由于G、H、I、J高程值與建筑物邊界鄰近的地面模型值相近,一般取地面模型的高程均值來代替墻體底部特征點的高程值[2]。
根據以上關系可以推算出建筑物墻體底部特征點G、H、I、J的三維坐標,將其按順序連接可以組成建筑物底面的邊緣輪廓。利用邊緣線段相鄰垂直、相對平行條件作為約束條件,對基于LiDAR數據生成的建筑物底部的粗略輪廓點進行間接平差,可以得到建筑物底部輪廓點的真實三維坐標[2]。
為了獲取建筑物頂部特征點的三維信息,將建筑物頂部的所有融合數據組成不規則三角形格網,將三角形三個頂點的三維坐標代入平面三元一次方程可以推算出各平面的平面參數ai、bi、ci、di,求解方程式如下:
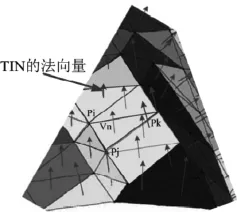
圖10 TIN的法向量圖
利用此方法計算格網中每個三角形平面的法向量。以圖10中的△PiPjPK為例,其平面法向量的計算公式如下:
由于機載LiDAR系統在采集建筑物的三維信息時,受多種誤差的影響,使獲取建筑物的同一平面特征點的三維坐標與真實特征點的三維坐標存在著一定的誤差,造成頂部同一平面的融合數據點組成的三角形的法向量很難有完全相等的方向值。
因此本文根據機載LiDAR系統采集的點位精度設定同一平面法向量的相似閾值,設兩相鄰三角形的法向量vi、vj分別為(mi、ni、pi)、(mj、nj、pj),其相似系數為:

通過分析統計同一建筑物內的所有三角形的法向量,將三角形法向量的方向值相似系數在相似閾值之中的融合數據點劃分到同一平面上。
選取同一平面內所有三角形法向量的平均值來代替該平面的法向量,通過將平面法向量代入點法式方程來求該平面的平面方程:

通過分析建筑物構造原理,可以發現建筑物頂部各個平面的交線為建筑物的輪廓線,輪廓線的交點為建筑物的輪廓特征角點。根據相鄰兩平面的平面方程可以推算建筑物頂部輪廓邊緣的直線方程:

將式(8)進行變換,可以得到直線的對稱方程:

根據三個平面交于一點是建筑物頂部輪廓特征角點的原理,列三個平面方程可以推算出建筑物頂部輪廓特征角點的三維坐標(xn,yn,zn)(n表示特征點代號):
根據其各個平面的交線和輪廓特征角點的相關信息,確定其模型的線型框架和輪廓特征角點的空間關系。以圖9為例,通過分析A、B與墻體頂部特征點C、D、E、F之間的空間關系,可以看出A點是ACF、ABDC、ABEF三個平面的交點,B點是BED、BAFE、BDCA的交點。解算(10)可以獲得特征點A的三維坐標值:xA、yA、zA,同時可以獲得特征點B的三維坐標值:xB、yB、zB。此原理同樣適用于工字型和金字型建筑物頂部特征點的解算,工字型建筑物頂部特征點的解算過程與人字型的方法一樣,而金字型建筑物頂部特征點相當于人字型建筑物頂部特征點A、B兩點合為一點,設A點為其頂點,A點是ACF、ADC、AEF、ADE的交點,通過對ACF、ADC、AEF、ADE四個平面中的三個平面方程進行聯合解算,同樣可以得到A點的三維坐標值。
4.3 基于LiDAR數據和航空影像的建筑物重建方法
采用數據驅動方法對沒有內部特征點和有內部點特征點的兩類復雜建筑物進行重建,其流程如圖11所示。

圖11 復雜建筑物三維模型重建流程圖
其具體處理過程:利用樹型結構將復雜建筑物分為頂部層和墻體層,按各平面或曲面的空間組合關系將頂部層和墻體層細分為不同的平面分層。利用復雜建筑物墻體的頂面和底面特征點的空間關系組成其墻體的線型框架模型。利用TerraBuilder軟件中建筑物紋理映射模塊將紋理庫中的模擬紋理映射到墻體的線型框架模型上,得到復雜建筑物墻體的模擬模型。利用建筑物頂部每個平面內的采樣點(xi,yi,zi)滿足其對應的平面方程作為約束條件,對每個平面內的融合影像的LiDAR數據進行間接平差來擬合各個平面的初始輪廓。利用推算的復雜建筑物頂部輪廓特征直線方程和特征點的三維坐標對建筑物平面邊界進行優化處理,利用各個優化平面之間的相交直線、相交點的空間連接關系,將復雜建筑物的頂部所有平面拼接在一起來獲取復雜建筑物頂部的最優模型。根據樹型結構將復雜建筑物頂部層的最優模型和墻體層的模擬模型進行重構,就可以生成復雜建筑物的三維模型。
5 結 論
機載LiDAR系統的激光發射頻率和影像分辨率不斷提高,使高效快速地獲取高精度的建筑物頂部與墻體的三維空間坐標、幾何形狀、紋理屬性等信息成為現實。由于復雜建筑物的幾何參數不可量化,且受機載LiDAR系統對建筑物三維信息的采集方式和建筑物相互遮擋的影響,無法獲取建筑物墻體紋理屬性,造成基于LiDAR和航空影像兩種數據無法重建真實建筑物墻體模型。本文采用樹型結構將復雜建筑物類的融合數據分為頂部層和墻體層來分開處理。采用在墻體的線型模型上映射模擬紋理生成了墻體的模擬模型,目前還無法解決陽臺、玻璃窗等繁雜紋理的三維仿真,但解決了基于LiDAR和航空影像無法重建建筑物墻體模型的問題。
[1] 孫敏,馬藹乃,陳軍.城市三維模型的研究現狀評述[J].遙感學報,2002,6(2):155~161
[2] E.P.Baltsavias.Airborne laser scanning:basic relations and formulas[J].ISPRS Journal of Photogrammetry&Remote Sensing.1999,54:199~214
[3] Pulli k.Multiview registration for large date sets[C].Proceedings of the 2nd International Conference on 3D Digital Imaging and Modeling,Tampa,1999:160~168
[4] 李樹楷,薛永棋.高效三維遙感集成技術系統[M].北京:科學出版社,2000
[5] 張小紅.機載激光掃描測高數據濾波及地物提取[D].武漢大學,2002
[6] 黃先鋒.機載激光雷達點云數據的實時渲染[J].武漢大學學報(信息科學版),2005,Vol.30,976~978
The Three-dimensional Reconstruction of the Building Based on LiDAR Data and Aerial Images
Sun Hua,Yu Ru,Ouyang Guanghui,Li Cheng
(Xiantao Survey and Designing Institute,Xiantao 433000,China)
Under the background of building digital city vigorously around the world,it is difficulty and important to obtain accurate three-dimensional information of building feature points and reconstruct three-dimensional building models while constructing three-dimensional model of the city.So three-dimensional building reconstruction technology based on amalgamating multi-source data will be hot topics at the forefront for a long period of time.
Airborne LiDAR System;Three-dimensional Building Reconstruction
2011—08—22
孫華(1984—),男,工程師,主要從事3S技術集成及數字城市建設。
1672-8262(2012)02-60-05
P208.1
A
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代出版(2020年3期)2020-06-20 07:10:34
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54