基于小波變換和圖像融合的智能照明控制系統研究
2012-05-28 01:02:46葉永偉王曉恩
照明工程學報 2012年3期
葉永偉 王曉恩 王 運
(1.特種裝備制造與先進加工技術教育部/浙江省重點實驗室(浙江工業大學),浙江杭州310014;2.浙江中信設備安裝有限公司,浙江杭州310004)
1 引言
進入21世紀以來,我國建筑進入了一個智能化高度發展的時代,新的智能大廈、現代化居民居住小區按照傳統的照明控制方式已經不能滿足其更高標準的要求。傳統的照明方式簡單、有效、直觀,但它過多依賴控制者的個人能力,控制相對分散以及無法有效管理,并且其適時性和自動化程度太低。其后的自動照明控制模式雖然解決了傳統方式控制相對分散和無法有效管理等問題,實現了照明控制的自動化,但卻無法實現調光控制功能。
目前,國外產品如尼科公司的智能照明控制系統能預設各種場景進行照明控制,廣泛應用于辦公大樓、賓館酒店、體育場館等場合,但是存在價格高、操作相對復雜,對管理人員要求較高等缺點。國內相關應用于居住小區及普遍公共場所的照明智能控制系統尚不多見。
為解決傳統紅外+光感傳感器方式的燈光照度控制系統存在要求較多的傳感器,而且布置位置要求較高和工程施工、布線量大等缺點,本文提出采用動靜監測(紅外、聲控)+數字圖像信息融合的照度控制方式。通過將采集來的圖像信息進行融合處理,對融合之后的圖像進行灰度劃分,將每一區域的灰度平均值與預設灰度值對比,從而調節場景照度。
2 動靜監測傳感數據與CCD數字圖像信息融合技術
樓宇智能照明系統中動靜監測與CCD數字圖像信息融合技術的控制系統框圖如圖1所示。
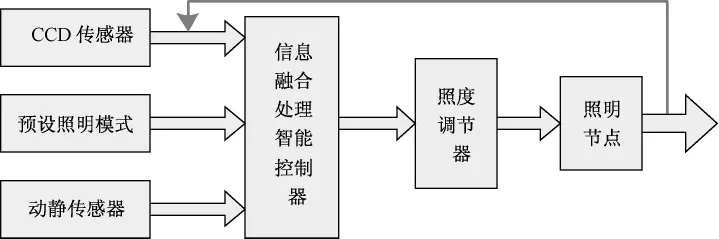
圖1 智能照明控制系統框圖
其基本原理是:通過動靜檢測技術觀察是否有人走動,如果沒有人走動,關閉照明;如果有人存在,對采集的多幅數字圖像進行分析,將圖像灰度平均值與各種預置的標準值進行對比,計算其環境照場的照度模型,如果在照明系統預設模式允許的誤差范圍內,就不需要對照度進行調整,反之,就對照度進行調整。
圖像融合是指將不同傳感器獲得的同一景物的圖像或同一傳感器在不同時刻獲得的同一景物的圖像,經過去噪、時間配準、空間配準和重采樣后,再運用某種融合技術得到一幅合成圖像的過程通過對多幅傳感器圖像的融合,可克服單一傳感器圖像在幾何、光譜和空間分辨率等方面存在的局限性和差異性,提高圖像的質量,從而有利于對物理現象和事件進行定位、識別和解釋。其具體過程見圖2。
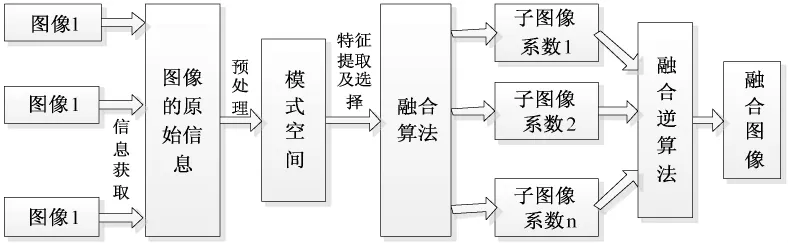
圖2 圖像融合示意圖
3 基于小波變換的圖像融合技術
3.1 預處理
智能照明系統中,當動靜監測發現有人走動時,CCD攝像機會對相應區域進行圖像信息采集。但在圖像采集過程中,由于受到各種因素(如傳感器的位置速度、光照強度、隨機噪聲等)的影響,實際獲得的圖像往往包含上述影響因素的特征。因此在實現圖像融合之前,需要對傳感器獲得的不同圖像進行預處理,包括圖像校正、增強、平滑、濾波、配準等。
如圖3所示,為CCD攝影機采集的室內圖像經過圖像校正、濾波以及配準預處理之后的效果顯示。
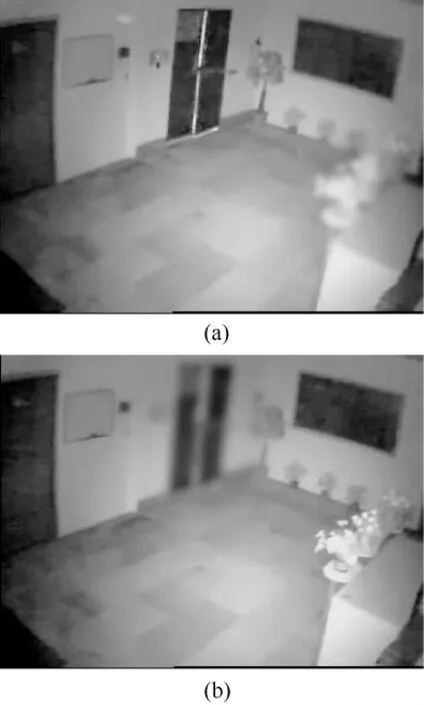
圖3 采集的室內圖像
從圖3中可以發現,由于光照強度,以及噪聲和干擾等因素,圖3(a)中右邊花盆有些模糊,圖3(b)中的門有些模糊,這樣的圖像所提供的信息不利于智能照明系統識別,由此可利用下面的小波融合技術將源圖像信息進行融合。
3.2 小波變換融合
Mallat在Burt和Adelson的塔形圖像分解和重構算法的啟發下,提出了小波變換的Mallat快速算法,按照二維Mallat算法,將每一副經過預處理的CCD圖像進行二維分解。
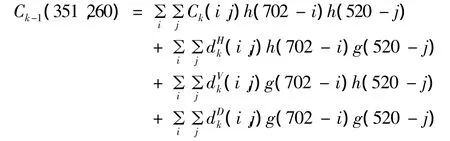
本文CCD攝影機采集的圖像大小為351×260,設分解層數為3,在尺度k-1上按如下的Mallat分解公式進行分解:
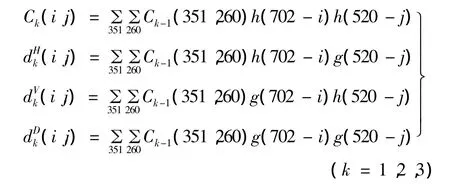
式中,Ck,dHk,dVk和dDk分別表示預處理后的CCD圖像在351×260分辨率下的低頻分量,水平高頻分量,垂直高頻分量和對角高頻分量。其中低頻分量反映了CCD圖像的近似和平均特征,集中了圖像的大部分能量信息。如圖4所示,為CCD圖像的小波分解示意圖。
在兩幅CCD圖像的小波變換域內,分別對水平,垂直與對角分量進行融合。在各尺度j(j=1,2,3)上將兩幅CCD圖像的高頻系數進行比較,把對應位置上絕對值較大的系數作為重要小波系數保留下來,即
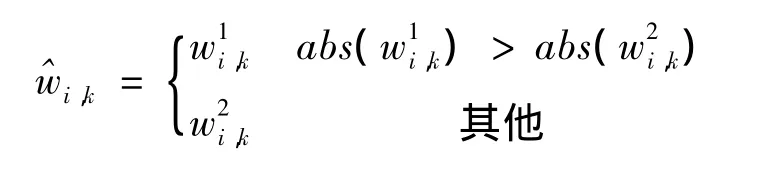
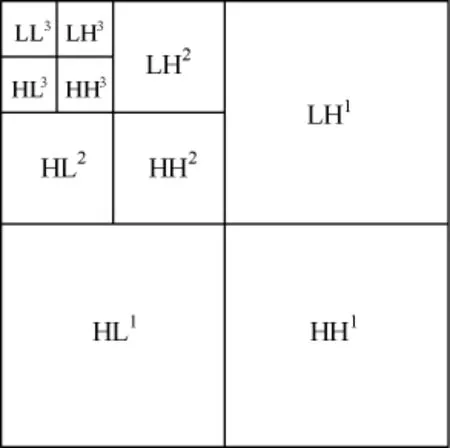
圖4 CCD圖像的三層小波分解示意圖
其中w1i,k,w2i,k分別表示兩幅CCD圖像在各尺度分量上的小波系數。
對兩幅CCD圖像經小波變換之后的逼近系數C1J和C2J進行處理,由于在智能照明系統采集圖像時,受各方面因素,使得CCD攝影機采集的圖像在局部出現模糊的現象,圖像模糊表示其細節信息(或高頻信息)丟失較多,相比之下,其整體信息(或低頻信息)保持較好,因此兩幅CCD圖像經小波分解后其逼近系數之間的差異要遠小于小波系數之間的差異,故融合之后的逼近系數可由
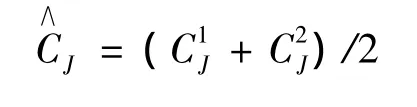
確定。
利用以上得到的全部小波系數以及可以得到由智能照明系統采集的多幅CCD中的逼近系數進行二維小波反變換,有重構式
圖像的融合圖像。其融合過程如圖5所示。
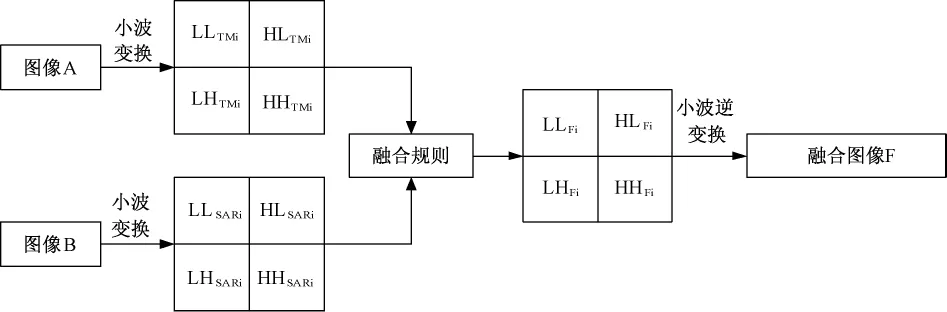
圖5 圖像融合過程
3.3 融合結果評價指標
CCD圖像融合的效果對智能照明系統的后續工作尤為重要,本文提出的采用小波變化法對采集的圖像進行融合,其融合效果可從灰度平均值、標準方差以及信息熵三個指標進行評價。
3.3.1 灰度平均值
融合之后的圖像大小仍為351×260,其灰度平均值為:
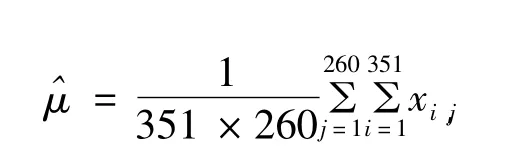
其中xi,j表示在位置(i,j)的像素的灰度水平,平均值表示了一副圖像的平均亮度。
3.3.2 標準方差
融合之后的圖像的標準方差為:

這個公式在整個圖像中符合在灰度水平和平均值之間的方差度。
3.3.3 信息熵
融合之后的圖像傳統的信息熵表示為:
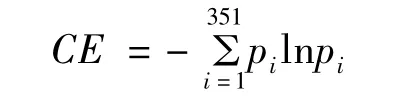
其中pi是灰度值為i的像素的數目和整個像素數目的比值。信息熵代表了CCD圖像含有信息的豐富程度。如果pi對于任意灰度水平都是常量,那么信息熵就可以達到最大值。如果某種方法得到的融合圖像,其熵值較大,則說明此方法較優;否則,說明該方法較差。
3.4 圖像灰度平均值及其穩定性
將CCD攝影機采集的圖像經過小波融合之后,接著就要提取融合圖像的灰度平均值,以便智能照明系統調用。
若記mean(A)為融合后CCD圖像的灰度平均值,則有:
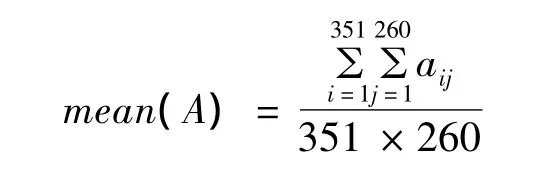
以上是整個融合圖像的灰度平均值,本文提出,將融合后的圖像劃分為幾個不同的區域A1,A2,A3…,如圖6所示,將融合后的CCD圖像劃分為4個區域,如圖6所示。
將圖像劃分區域就意味著將照明范圍劃分區域,通過計算得出每個區域的灰度平均值,與預先設定好的灰度值分別做對比,通過比較灰度值來判定每個照明區域內是否有人存在,從而調節智能照明系統,對不同區域采用不同的光照強度。
如果將融合后的CCD圖像劃分為四個區域,如
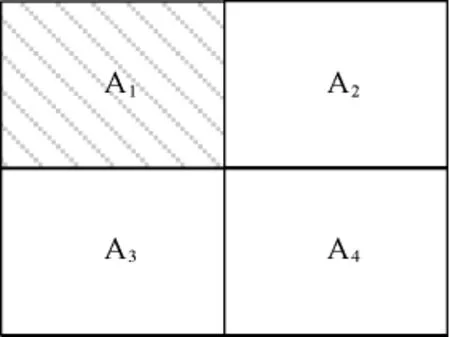
圖6 將融合圖像劃分4個區域
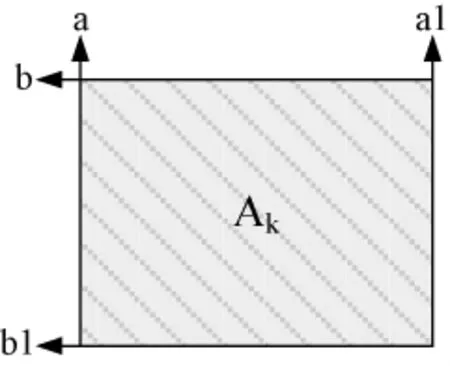
圖7 每個區域的圖像示意圖
4個區域大小均為175×130,其灰度平均值分別為
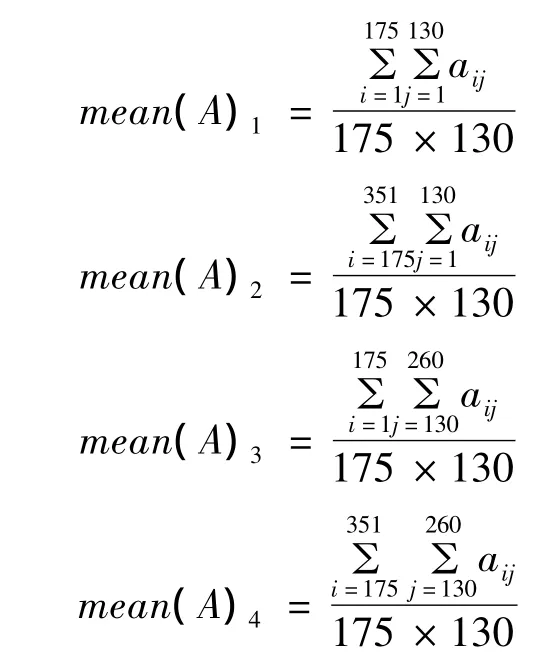
對圖像的一些操作,如調整亮度、重采樣、顏抖動、平滑、加噪聲、壓縮等,均可歸結為對圖像一種擾動,即穩定性。設A'為圖像A受到擾動E后的圖,即A'=A+E,則根據平均值不等式,有

由此即可判斷圖像融合后的穩定性。
3.5 與預設值對比
將融合處理后的圖像灰度平均值與預設值進行對比,如果平均值在預設值的誤差范圍之內,則智能照明系統不做調整;如果平均值超出預設值誤差范圍,則智能照明系統做出相應調整,使之調試在相應模式的照度誤差范圍之內。
4 實驗數據分析
本文對上述的兩幅室內CCD圖像進行了圖像融合仿真,并且提取了智能照明系統所用到的融合圖像的有關信息,采用本文提出的小波變換融合算法,其實驗融合圖像效果對比如圖8,圖9,圖10所示。

圖8 右花盆模糊

圖9 門模糊

圖10 融合效果圖
本仿真實驗將本文提出的融合算法與其他三種不同的融合算法進行了對比,其數據比較如表1所示:
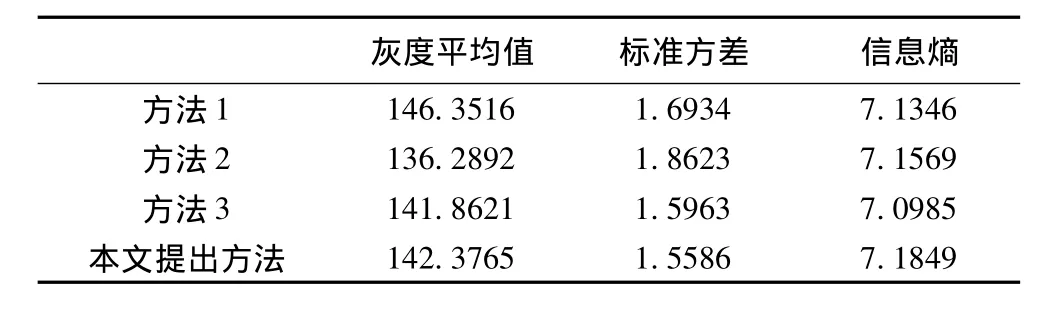
表1 不同方法數據對比
表1中數據可以看出,本文提出的融合算法得到的融合圖像更清晰,其他三種融合算法得到的信息熵值都比本文提出的融合算法得到的信息熵值低,小波變換融合算法可以得到更豐富的時域和頻域信息,有效的保留了照明區域的細節信息,為智能照明系統提供更全面的數據信息。
5 結語
本文提出采用動靜監測和圖像融合技術對智能照明系統進行照明控制,圖像融合主要采用小波變換算法對采集的圖像進行處理,實驗表明這種融合算法比其他融合算法的融合效果要好,保留了必要信息,抑制了不需要的信息,為智能照明系統的后續工作提供了良好的圖像信息。系統結合圖像融合技術,能夠根據現場實際情況、人員變動以及天氣因素(陰雨霧雪)等的變化,實時得進行照明器的調節,在保證足夠照度的條件下,也相應降低了智能建筑照明系統的能耗。
[1]覃征,鮑復民,李愛國等.數字圖像融合[M].西安交通大學出版社.
[2]Rafael C.Gonzalez,Richard E.Woods.Digital Image Processing Second Edition[M].Publishing House Of Electronics Industry.
[3]郭亞,王水波.基于灰度圖像的車牌定位算法研究與實現[J].現代電子技術,2008(2):137~03.
[4]張姁.基于小波的彩色圖像灰度水印算法研究[D].河北:河北工業大學,2007.
[5]浦西龍,呂建平.一種基于小波變換的多分辨圖像融合算法[J].計算機工程與應用,2007,43(20):65~67.
[6]劉貴喜,楊萬海.基于小波分解的圖像融合方法及性能評價[J].自動化學報,2002,28(16).
[7]方凱.數字圖像融合算法研究[D].西安電子科技大學,2006.
[8]秦云霞.圖像融合算法研究[D].蘭州大學,2010.
[9]毛士藝,趙巍.多傳感器圖像融合技術綜述[J].北京航空航天大學學報,2002:05~0512~07.
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
